Noitom PN Link Setup Guide
Preparation
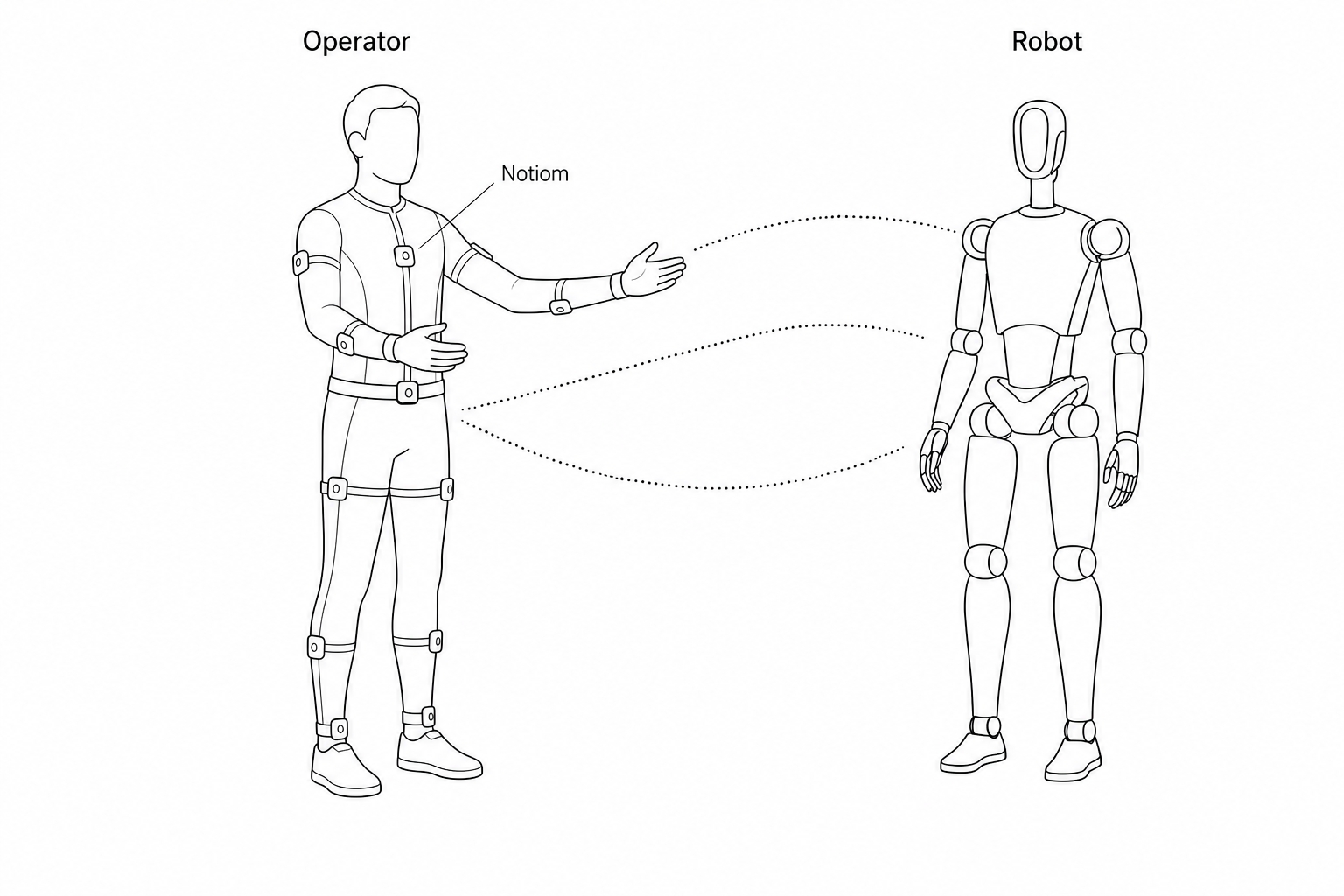
Teleoperation device side
| Device | Quantity | Description | Notes |
|---|---|---|---|
| PND robot | 1 | Adam series robot | Configure teleoperation program |
| User Computer | 1 | Windows recommended | Install the official Noitom mocap software Axis Studio 3, connect the suit, and calibrate |
| Noitom PN Link | 1 | Half-body or full-body configuration depending on robot model | Follow the official Quick Start Guide and Noitom tutorial video to wear the suit correctly |
The official guide describes wireless connection between the suit and PC. You can also use wired connection:
Wired connection to the mocap suit
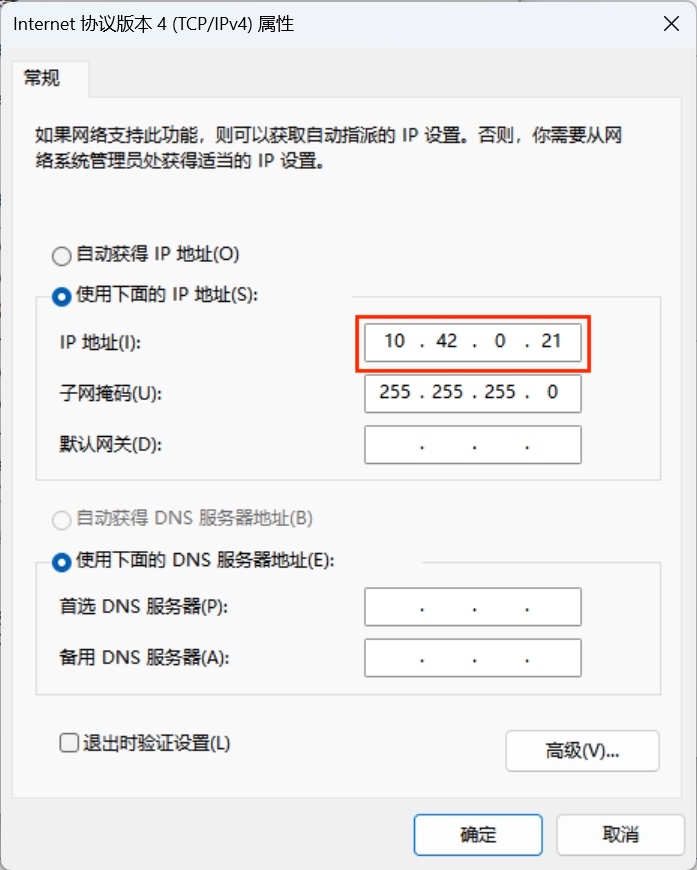
Connect your PC and the mocap suit with an Ethernet cable. Set the PC network interface to the same subnet as the suit: 10.42.0.xxx, subnet mask 255.255.255.0.
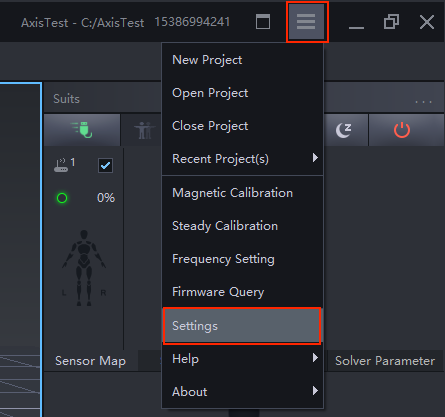
Open Axis Studio 3 → click Settings:
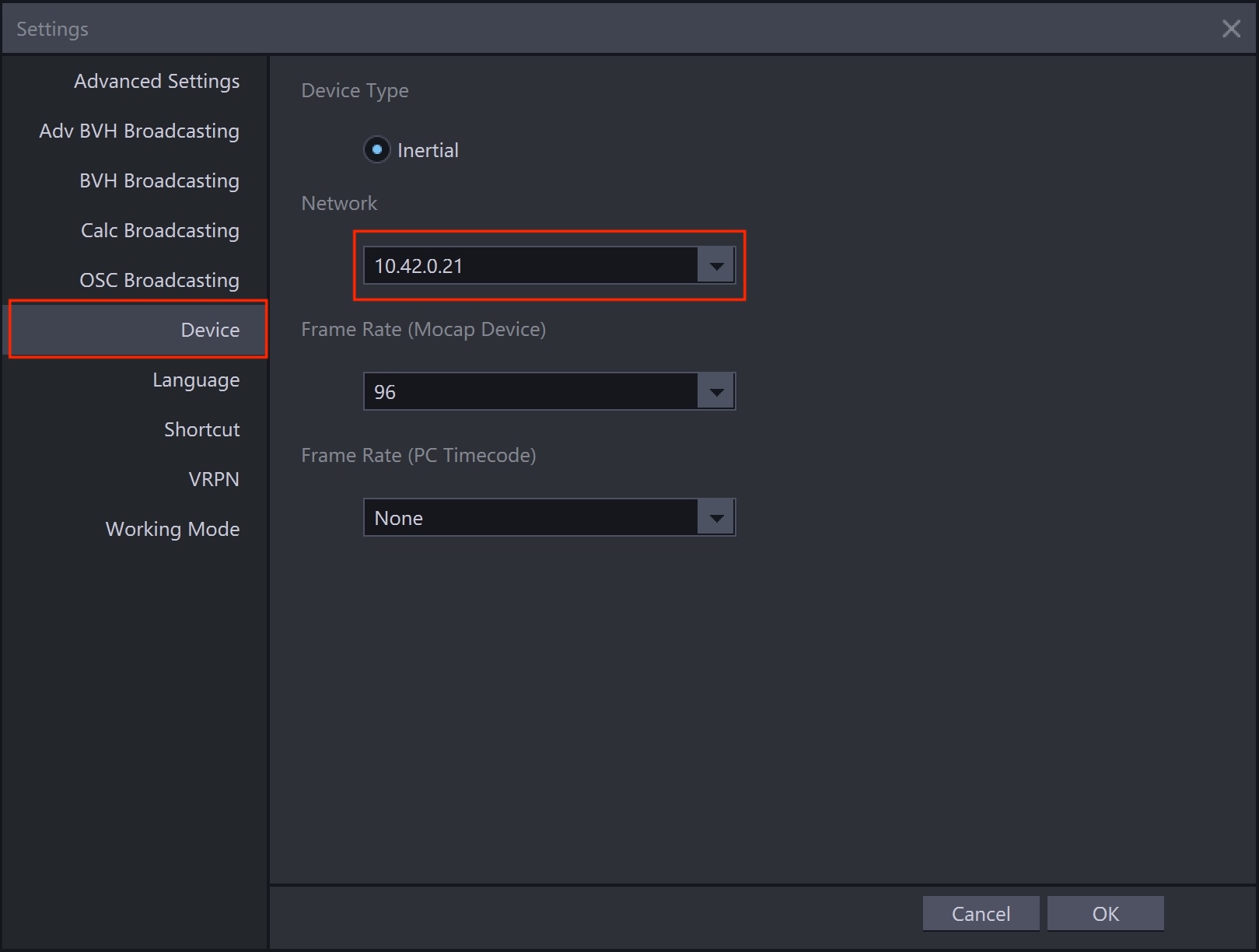
Under Device → Network, select an IP in the same subnet as the suit: 10.42.0.XXX:
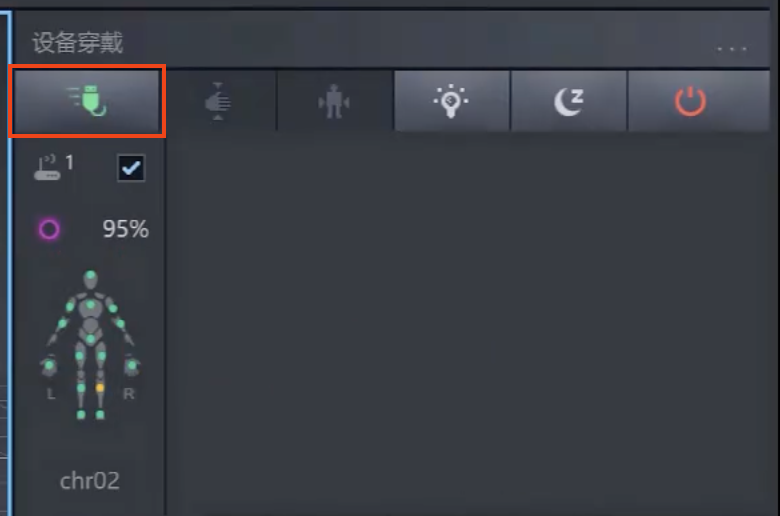
Click the green icon to connect sensors:
Robot side
Follow the standard boot process to start the robot. Ensure your PC and the robot are on the same network segment. See network connection.
-
On your PC, open a terminal and connect to the robot.
-
Install the teleoperation program (requires internet; skip if already installed).
Operation
Run the teleoperation program
ssh pnd-humanoid@192.168.XX.XX # Replace XX.XX with the actual IP (on the back of the remote control handle); default password: pndxyz
source /opt/pnd/pnd_teleop/setup_cli.bash
# Choose the command for your model:
# Adam U
spteleop teleop adam_u noitom pinocchio
# Adam Pro
spteleop teleop adam_pro noitom pinocchio
# Adam SP
spteleop teleop adam_sp noitom pinocchio
Axis Studio 3 settings
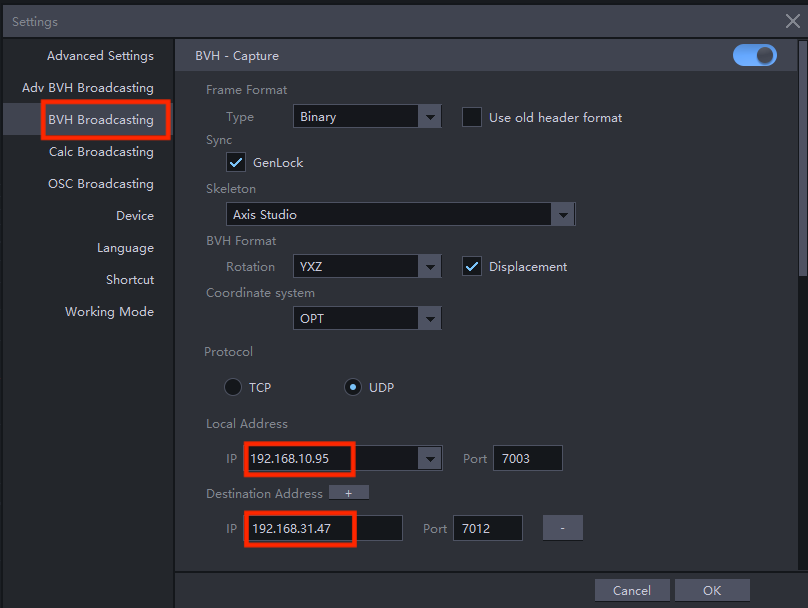
Open Axis Studio 3 → click Settings:
Enable BVH data broadcast and send motion data to the robot IP via UDP:
- Local address: PC Wi‑Fi IP
192.168.XX.XX - Target address: robot IP
192.168.XX.XX, port7012
Visualization preview
- Install and launch Foxglove Studio on your PC.
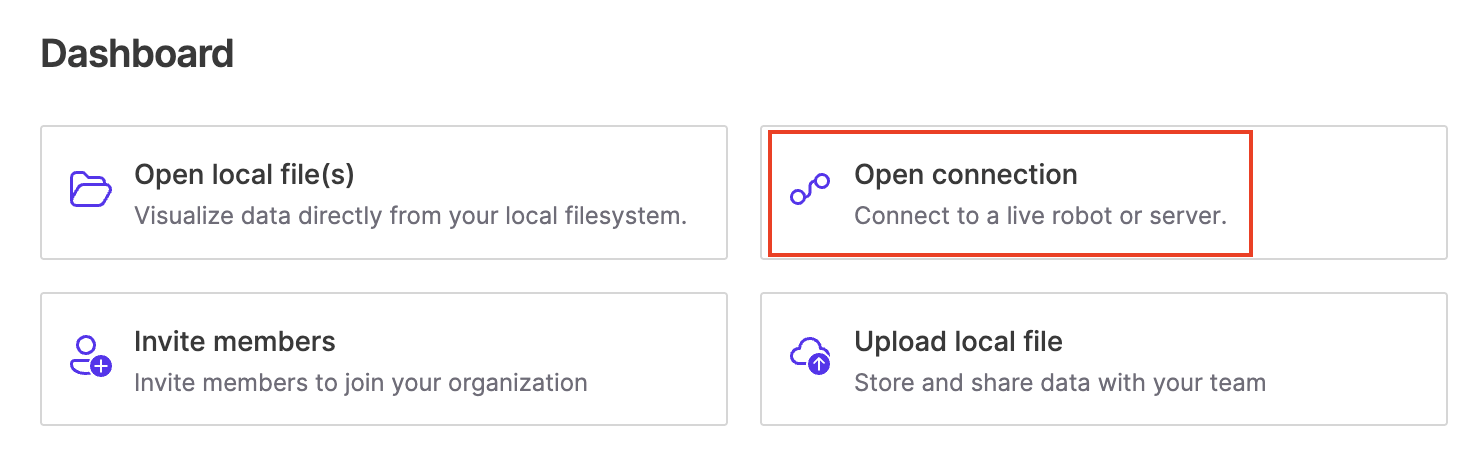
- Sign in and click Open Connection.
- Connect via WebSocket:
ws://localhost:8765(replacelocalhostwith the robot IP).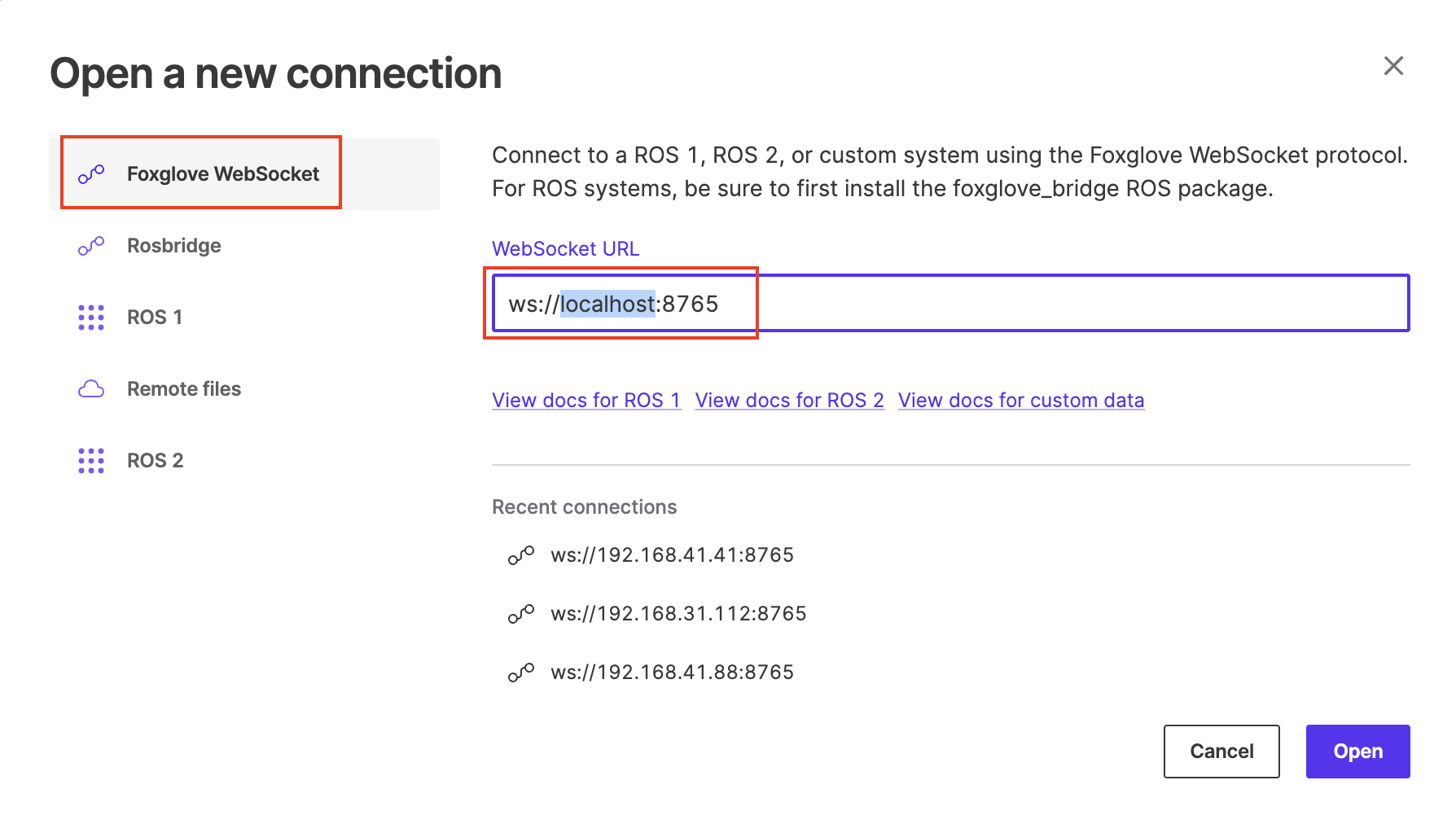
- Open the 3D panel settings.
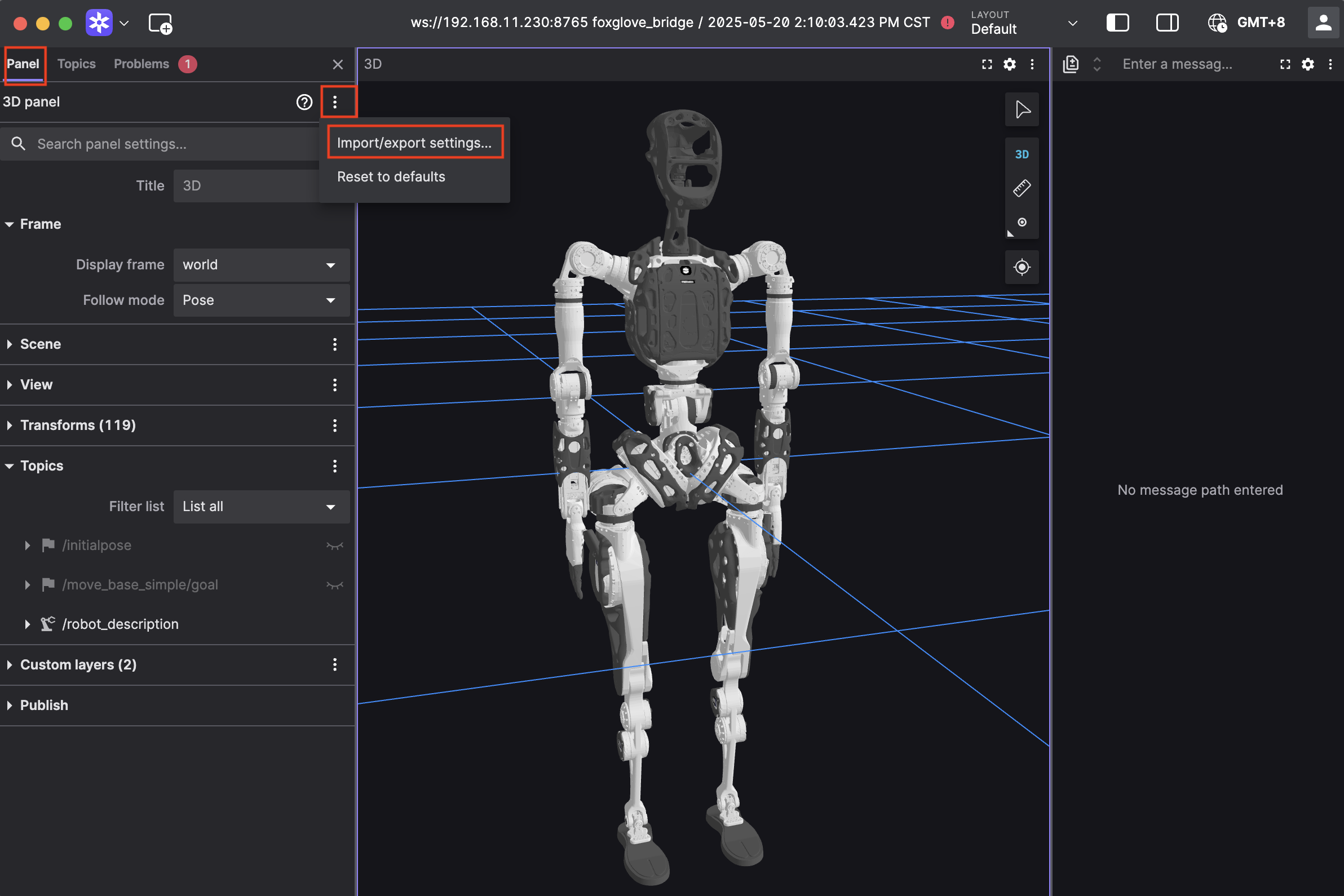
- Paste the configuration below and click Apply to preview motion mapping in real time.
Click to expand configuration code
{
"layers": {
"845139cb-26bc-40b3-8161-8ab60af4baf5": {
"visible": true,
"frameLocked": true,
"label": "Grid",
"instanceId": "845139cb-26bc-40b3-8161-8ab60af4baf5",
"layerId": "foxglove.Grid",
"size": 10,
"divisions": 10,
"lineWidth": 1,
"color": "#248eff",
"position": [
0,
0,
0
],
"rotation": [
0,
0,
0
],
"order": 1
}
},
"cameraState": {
"perspective": true,
"distance": 8.362406704377788,
"phi": 74.10829292531537,
"thetaOffset": 13.624928863620116,
"targetOffset": [
1.3462285617160472,
3.872395794634993,
-4.022926534191149e-17
],
"target": [
0,
0,
0
],
"targetOrientation": [
0,
0,
0,
1
],
"fovy": 45,
"near": 0.5,
"far": 5000
},
"followMode": "follow-pose",
"followTf": "world",
"scene": {
"meshUpAxis": "z_up",
"transforms": {
"showLabel": false,
"enablePreloading": true,
"axisSize": 0
},
"ignoreColladaUpAxis": true
},
"transforms": {},
"topics": {
"/robot_description": {
"visible": true
}
},
"publish": {
"type": "point",
"poseTopic": "/move_base_simple/goal",
"pointTopic": "/clicked_point",
"poseEstimateTopic": "/initialpose",
"poseEstimateXDeviation": 0.5,
"poseEstimateYDeviation": 0.5,
"poseEstimateThetaDeviation": 0.26179939
},
"imageMode": {}
}
Real robot operation
Warning
- Real robot operation involves risk. Keep a 3‑meter clear area around the robot.
- Connect to the real robot only after the teleoperation program runs normally and the preview looks correct.
- Confirm preview joint positions match the robot pose before enabling control.
- Do not switch to other modes (walking, running demos, etc.) during teleoperation.
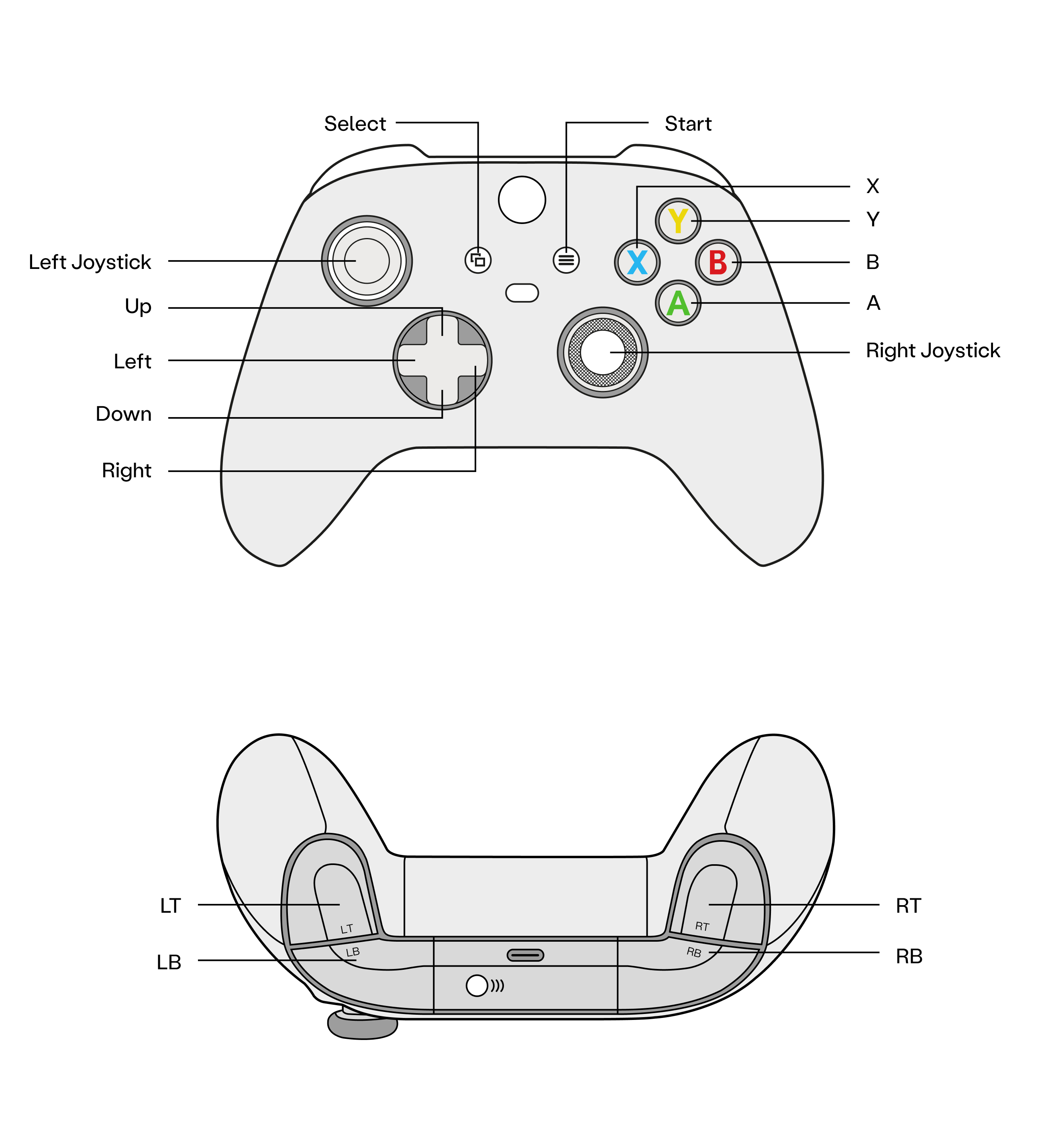
- In an emergency:
- LT + B: enter damping mode
- LB + RB: power off actuators
Real robot operation by model
Follow the standard boot process to start the robot.
- Zero position mode (Press A)
- Standing mode (Press X)
- In Standing Mode, press D‑pad Right to connect teleoperation
- In Standing Mode, press D‑pad Left to disconnect teleoperation
Follow the standard boot process to start the robot.
- Zero position mode (Press A)
- Motion mode (Press X)
- In Motion Mode, press D‑pad Right to connect teleoperation
- In Motion Mode, press D‑pad Left to disconnect teleoperation
Last updated: 2026-05-20