🤖 PND Adam-U Upper Body Robot
Adam-U is a high-performance upper body robot specifically designed for desktop-level operations and experiments, integrating advanced hardware architecture with intelligent control algorithms. Its compact design features exceptional upper limb flexibility, environmental perception capabilities, and high-precision dynamic control performance, enabling the execution of complex operational tasks in structured experimental environments. It is widely applicable across various cutting-edge fields including scientific research experiments, industrial automation testing, medical assistance , and service robotics.
💡 Key Features
🦾 Mechanical System Architecture
- Actuator System: Integrates 31 Quasi-Direct Drive (QDD) flexible force-controlled joints, enabling high dynamic precision control and multi-degree-of-freedom dexterous motion
- Modular Architecture: Employs a fully modular actuator design, optimizing production and maintenance efficiency while adapting to rapid deployment requirements
- Biomimetic Joint Design: Innovative biomimetic shoulder and elbow structures significantly enhance the robot's motion anthropomorphism and flexibility during complex operational tasks
- Waist Brake System: Equipped with dual brake mechanisms in roll and pitch directions, balancing motion flexibility with static stability
🧠 Control System & Communication Architecture
- PND-Network: Proprietary high-real-time communication protocol stack supporting the expansion and integration of multi-modal sensors such as vision cameras and force sensors, enhancing environmental perception and closed-loop control capabilities
- Central Control Unit: Features an Intel NUC12WSKi7 processor and self-developed Robot Control Unit (RCU), managing robot joint actuation, power management, communication scheduling, and system monitoring
- AI Computing Platform: Integrates the NVIDIA Jetson Orin NX 16GB embedded module, dedicated to high-performance AI inference, visual computing, and real-time decision-making tasks
- Perception System: Equipped with a ZED MINI depth vision sensor, enabling high-precision 3D environmental modeling and real-time spatial positioning
🌀 Dynamic Balance & Motion Planning
- WBC + MPC Algorithm Architecture: Utilizes a fused strategy based on Whole-Body Control (WBC) and Model Predictive Control (MPC), ensuring motion precision and stability in dynamic operational environments
- ROS2 Humble Support: Fully compatible with the ROS2 Humble framework, providing comprehensive development interfaces and toolchain support
🔋 Energy & System Management
- Intelligent Battery Management System (BMS): Integrates high-precision power monitoring and dynamic power distribution mechanisms, supporting sustained high-intensity task operation
- System Energy Efficiency Optimization: Employs low-power hardware design and dynamic power management strategies, significantly improving overall operational endurance
📡 Communication & System Expansion
- Multi-mode Communication Capability: Compatible with Wi-Fi 6, Bluetooth 5.0, Wired Ethernet, enabling high-bandwidth, low-latency remote operation and real-time debugging
- Sensor Expansion Interface: PND-Network offers excellent interface expandability, supporting multi-source sensor fusion and system function customization
🌐 Application Fields
- Scientific Research and Laboratory Scenarios: Suitable for high-precision automated experiments, robot algorithm testing, data acquisition, and analysis research tasks
- Industrial Automation Testing: Executes complex operational tasks in areas such as precision assembly, quality inspection, and production process validation
- Medical Assistance Research: Provides a reliable experimental platform for surgical robot development and rehabilitation training system research
- Service Robot Development: Adapts to complex service scenario prototyping, such as collaborative robots and intelligent service systems
📊 Technical Specifications
| Category | Details |
|---|---|
| Model | Adam-U |
| Height | 1.35 - 1.77m adjustable |
| Main Unit Weight | 26kg |
| Lifting Platform + Chassis[1] | 48kg |
| Total DOF | 31 DOF |
| Waist Brake | 2 directions (roll + pitch) |
| Single Arm DOF | Shoulder x3 + Elbow x1 + Forearm x1 + Wrist x2 + Dexterous Fingers x6 = 13 |
| Waist DOF | 3 DOF |
| Head DOF | 2 DOF |
| Battery | Capacity 1172W·h, Max Voltage 46.2V, Max Output Current 25A |
| Communication | Wi-Fi 6, Bluetooth 5.0, Wired Ethernet |
| Control Algorithm | High-robustness self-developed WBC + MPC control algorithms |
| Motion Control Computer | NUC12WSKi7 |
| Perception & AI Computer | NVIDIA Jetson Orin NX 16GB |
| Perception Sensor | ZED MINI |
| Head | ✓ |
| Hand | Dexterous Hand |
[1]Counterweight Note: It is recommended to place 40kg counterweight in the chassis to maintain balance.
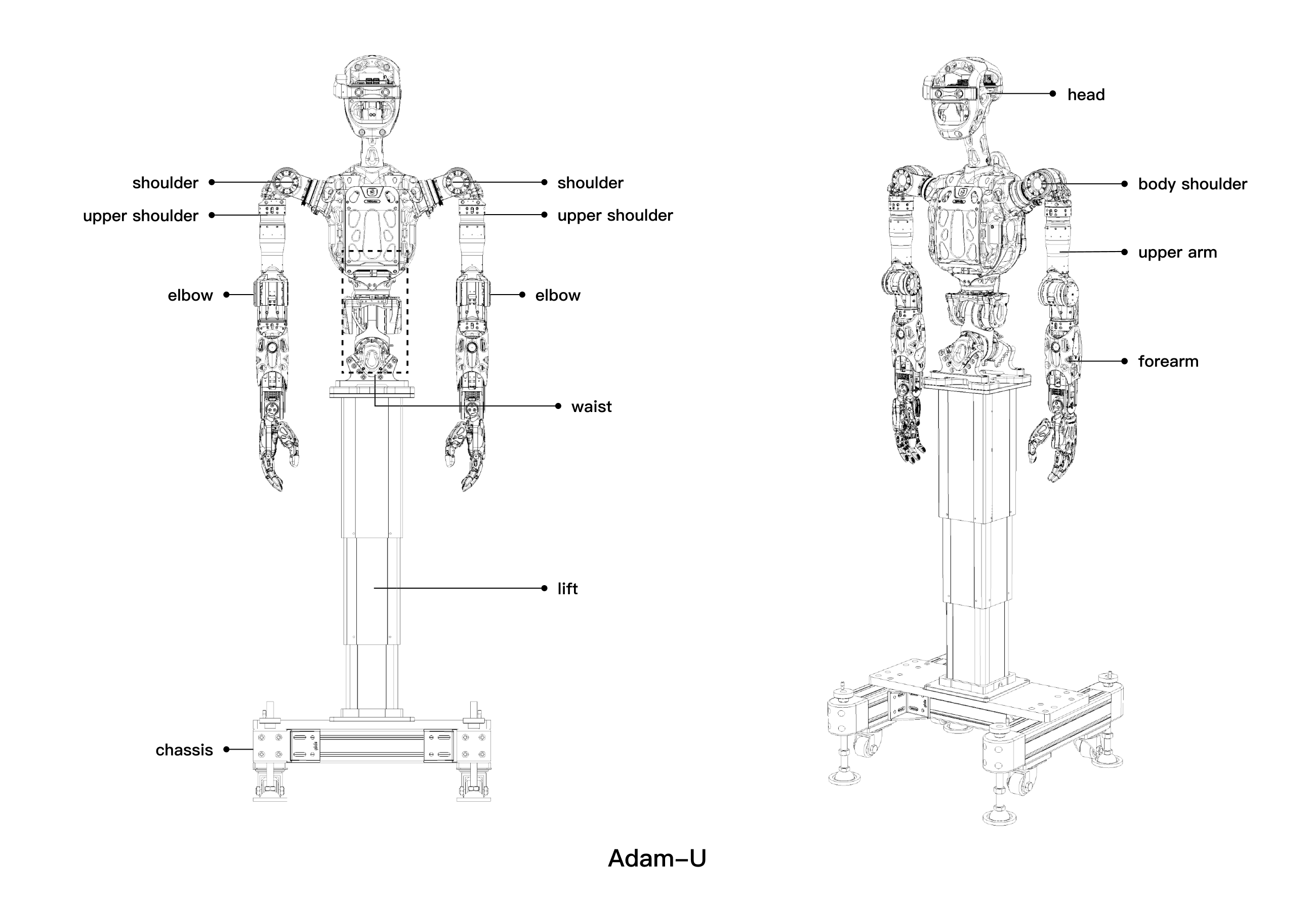
🧍♂️ Appearance Overview
🧩 Key Components
⚙️ Hardware Architecture
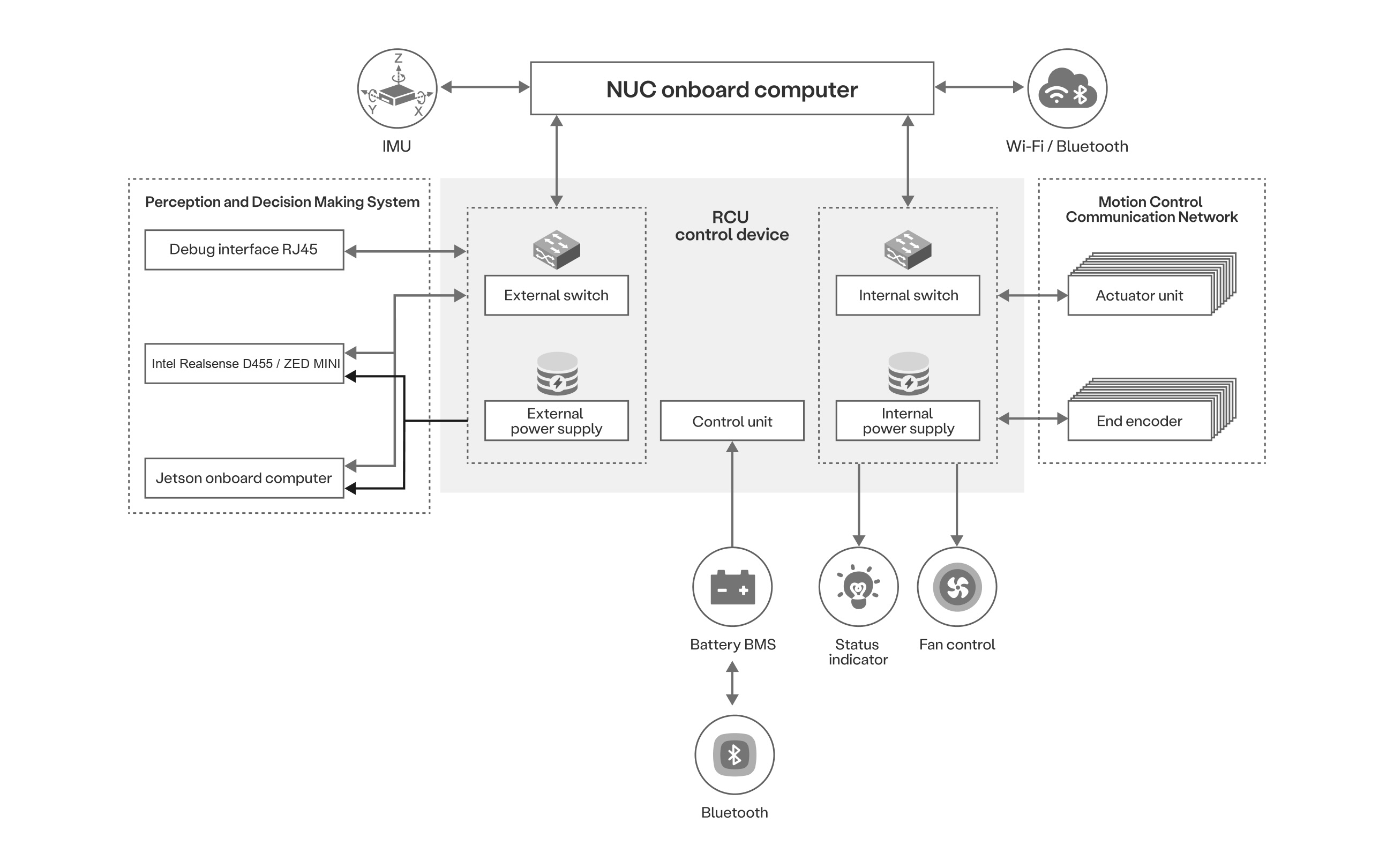
🧠 Control & Compute Modules
🧮 Motion Control Unit (Cerebellum)
| Parameter | Specification |
|---|---|
| Model | NUC12WSKi7 |
| CPU | 12th Gen Intel Core i7-1260P |
| Core Count | 12 Cores |
| Thread Count | 16 Threads |
| Max Turbo Frequency | 4.7GHz |
| Memory | 16G |
| Memory Type | DDR4 3200MHz |
| Cache | 18MB |
| Storage | 128G |
| GPU | Intel® Iris® Xe Graphics |
| GPU Max Dynamic Frequency | 1.40 GHz |
| Intel® Deep Learning Boost | Yes |
| Intel® Adaptix™ Technology | Yes |
| Intel® Hyper-Threading Technology | Yes |
| Instruction Set | 64-bit |
🧬 Perception & Decision Unit (Brain)
| Parameter | Specification |
|---|---|
| Model | NVIDIA Jetson Orin NX 16GB |
| AI Performance | 100 TOPS |
| GPU | 1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores |
| CPU | 8-core Arm® Cortex®-A78AE v8.2 64-bit CPU, 2MB L2 + 4MB L3 |
| Memory | 16GB 128-bit LPDDR5, 102.4GB/s |
| Storage | 128G M.2 SSD |
| Video Encode | 1x 4K60 (H.265) · 3x 4K30 (H.265) · 6x 1080p60 (H.265) · 12x 1080p30 (H.265) |
| Video Decode | 1x 8K30 (H.265) · 2x 4K60 (H.265) · 4x 4K30 (H.265) · 9x 1080p60 (H.265) · 18x 1080p30 (H.265) |
| Camera | 2x MIPI CSI-2 D-PHY lanes |
| USB | 4x USB 3.2 ports · 1x USB Type-C port |
| Display Interface | 1x DisplayPort |
| Network | Gigabit Ethernet |
| Other I/O | 40-pin header (UART, SPI, I2S, I2C, PWM, GPIO) · 4-pin fan header, DC power jack |
| Dimensions | 103x90x34 (mm) |
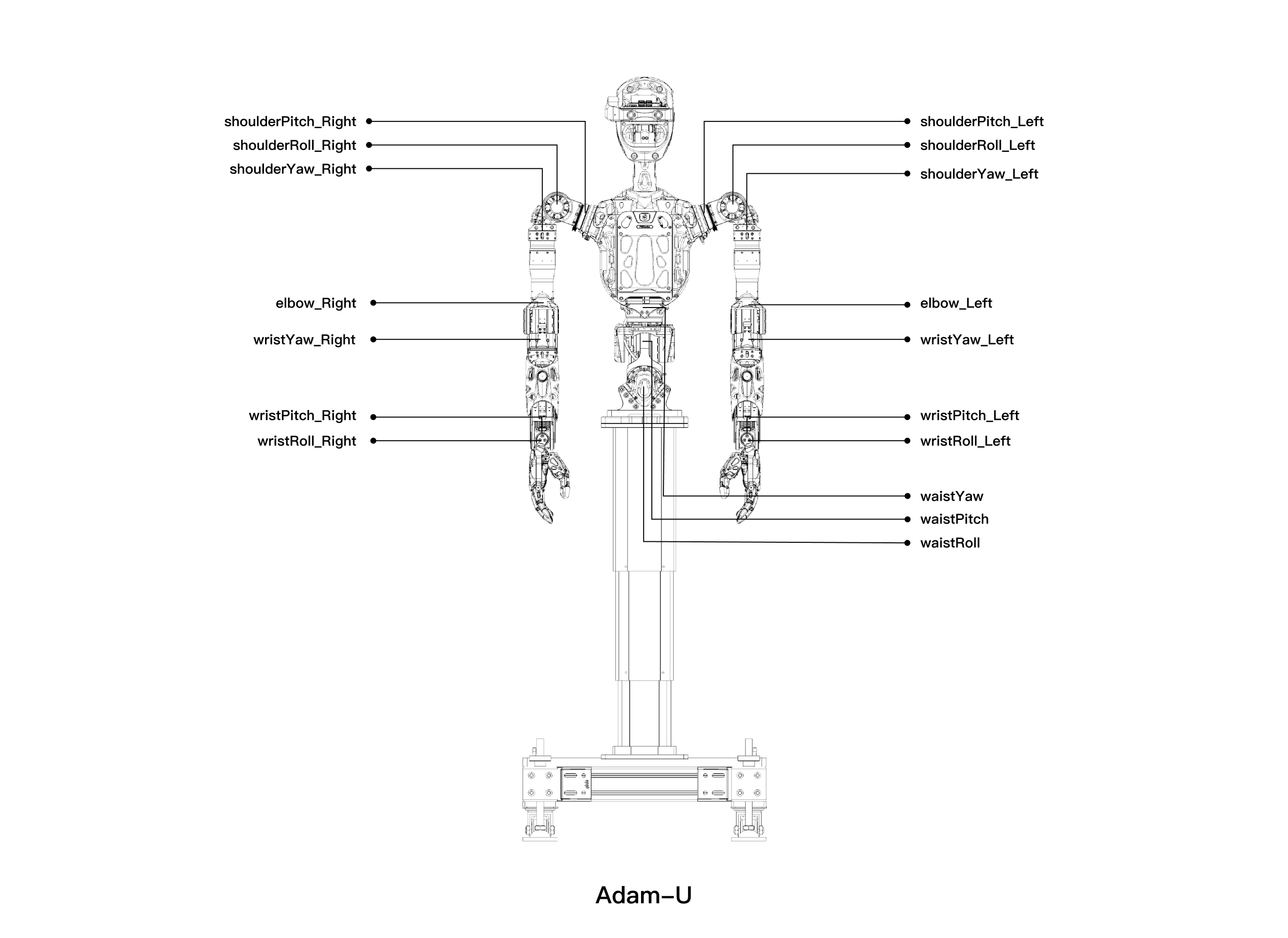
🔩 Joint Parameters
🤖 Adam-U
| Joint Name | Actuator Model | Limits (rad) | Notes |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420 ~ -3.6138 | Positive backward, negative forward |
| shoulderRoll_Left/Right | PND-50-14A-50-S | Left: +2.7925 ~ -0.6283 Right: +0.6283 ~ -2.7925 |
Left: Positive outward, negative inward Right: Positive inward, negative outward |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094 ~ -2.4958 | Positive backward, negative forward |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | Forearm rotation joint |
| wristPitch_Left/Right | PND-20-08-50-S | ±0.9599 | Wrist pitch joint |
| wristRoll_Left/Right | PND-20-08-50-S | ±0.9599 | Wrist roll joint |
| waistRoll | PND-60-17-50-S | ±0.2793 | Equipped with brake |
| waistPitch | PND-60-17-50-S | +1.3614 ~ -0.8378 | Positive forward, negative backward, equipped with brake |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hand_Left/Right | / | / | Dexterous hand joint |
| neckYaw | PND-60-17-50-S | ±1.0472 | Neck yaw joint |
| neckPitch | PND-60-17-50-S | ±1.0472 | Neck pitch joint |
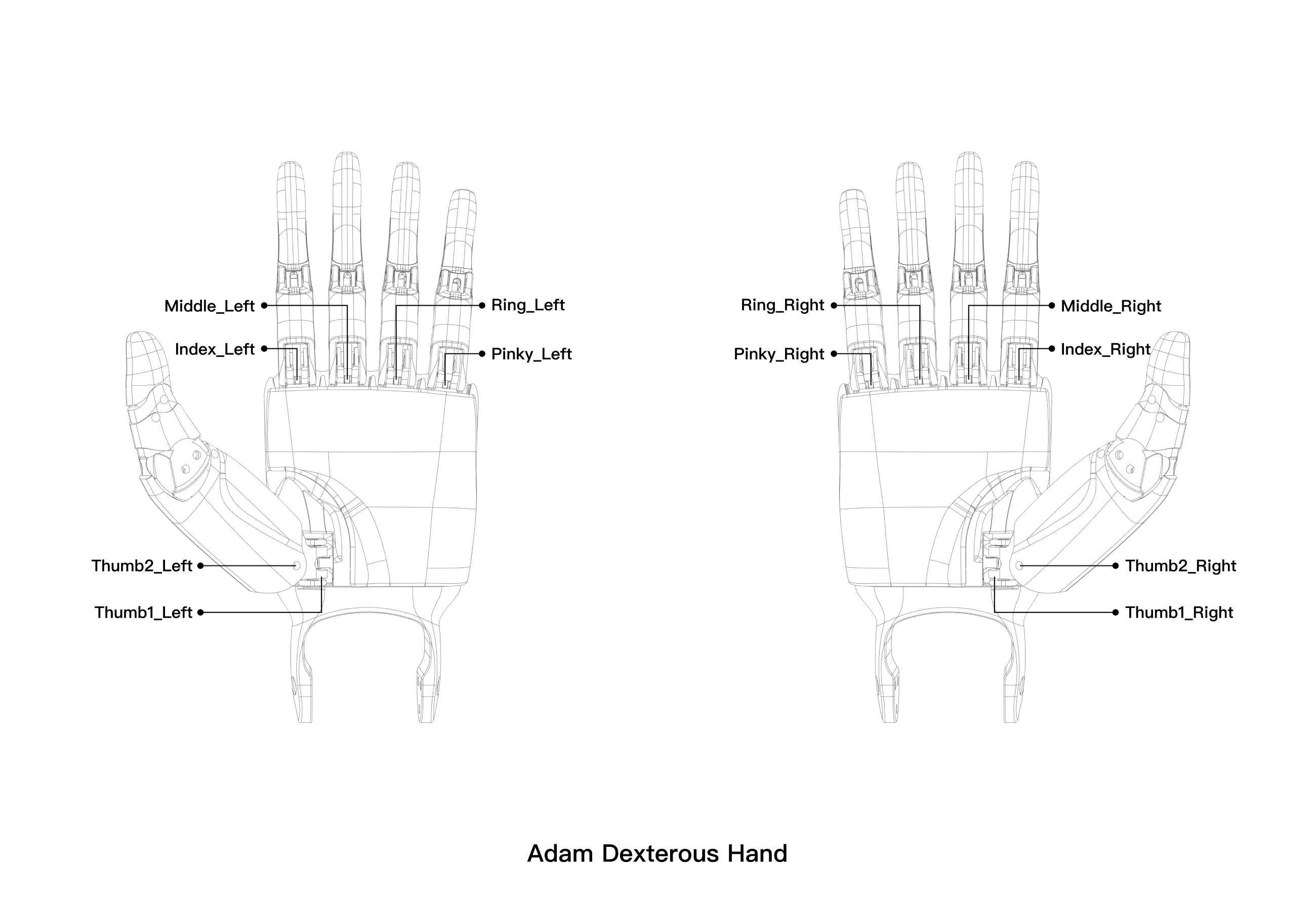
✋ PND Dexterous Hand
| Joint Name | Limit (rad) | Notes |
|---|---|---|
| Thumb1_Left/Right | 0.0873 ~ 1.5708 | Abduction |
| Thumb2_Left/Right | 0.4538 ~ 1.0821 | Flexion |
| Index_Left/Right | 0 ~ 1.5533 | Flexion |
| Middle_Left/Right | 0 ~ 1.5533 | Flexion |
| Ring_Left/Right | 0 ~ 1.5533 | Flexion |
| Pinky_Left/Right | 0 ~ 1.5533 | Flexion |
The finger joints adopt a linear control mapping:
A control value of 0 corresponds to the joint being at the fully open position (i.e., the lower angle limit).
A control value of 1000 corresponds to the joint being at the fully closed position (i.e., the upper angle limit).
Last Updated: 2025-12-03