Teleoperation Overview
A real-time motion mapping framework designed for the Adam series robots, enabling natural and smooth teleoperation through high-precision motion capture devices.
Supports Noitom PN Link, Meta Quest 3 / 3S, and PICO 4 Ultra Enterprise as input sources.
Demo
Multi-Device Support
Teleoperation motion data can come from various motion capture or VR devices. Choose the guide that matches your hardware.
| Device | spteleop mocap parameter |
Algorithm | Supported models | Documentation |
|---|---|---|---|---|
| Noitom PN Link | noitom |
pinocchio |
Adam U / Pro / SP | Noitom PN Link |
| Meta Quest 3 / 3S | webvr |
mink |
Adam U / Pro | Meta Quest 3 / 3S |
| PICO 4 Ultra Enterprise | pico |
mink |
Adam U / Pro | PICO 4 Ultra Enterprise |
CLI parameter reference
Full command format:
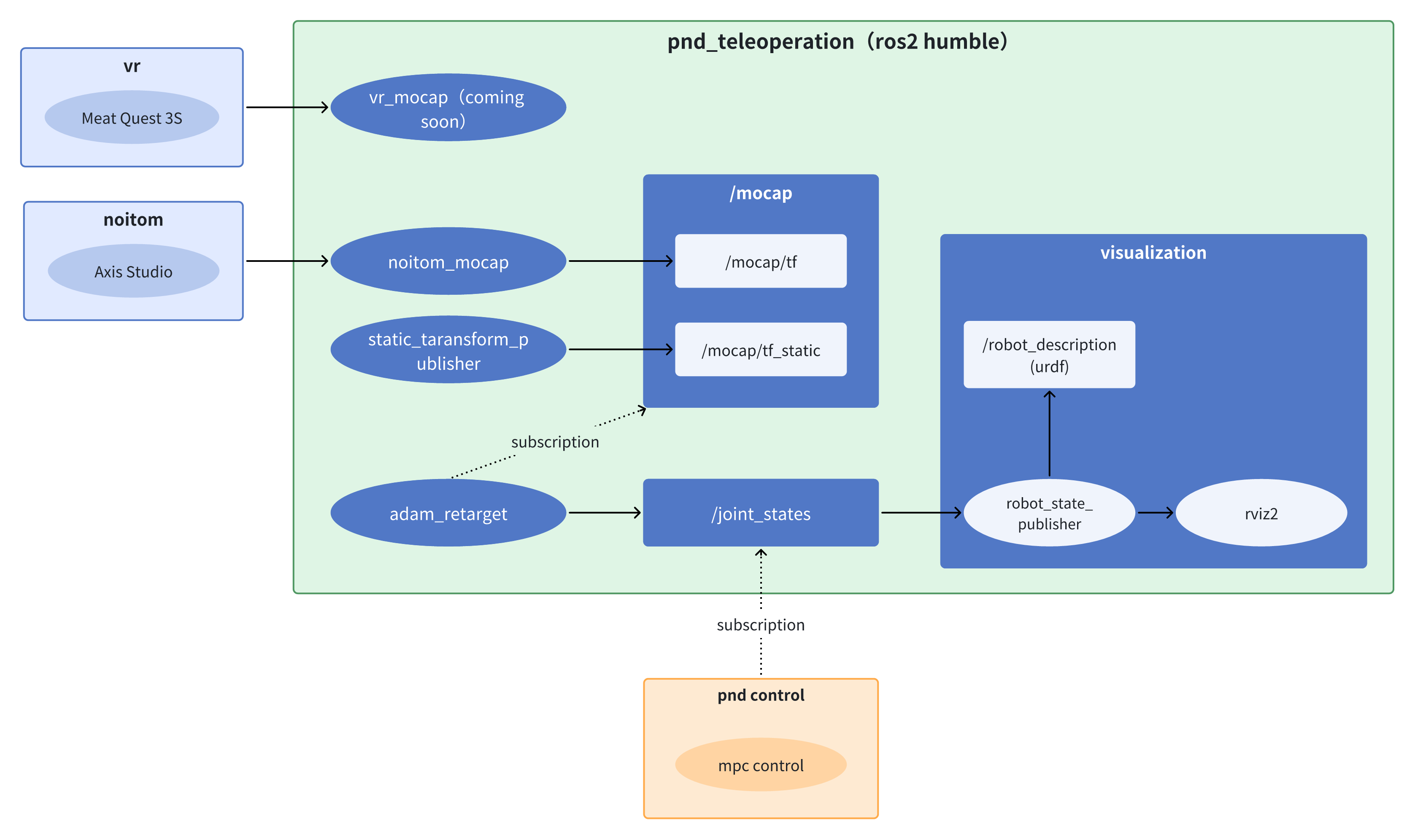
System Architecture
The system uses a distributed architecture:
- Motion input layer: Noitom PN Link (Windows + Axis Studio), Meta Quest 3 / 3S (browser WebVR), or PICO 4 Ultra Enterprise.
- Control core layer:
pnd_teleoperationandpnd-controlrunning on the robot's built-in NUC. - Data pipeline: Real-time data bus based on ROS 2 Humble.
Last updated: 2026-05-20