Meta Quest 3 / 3S 配置指南
准备工作
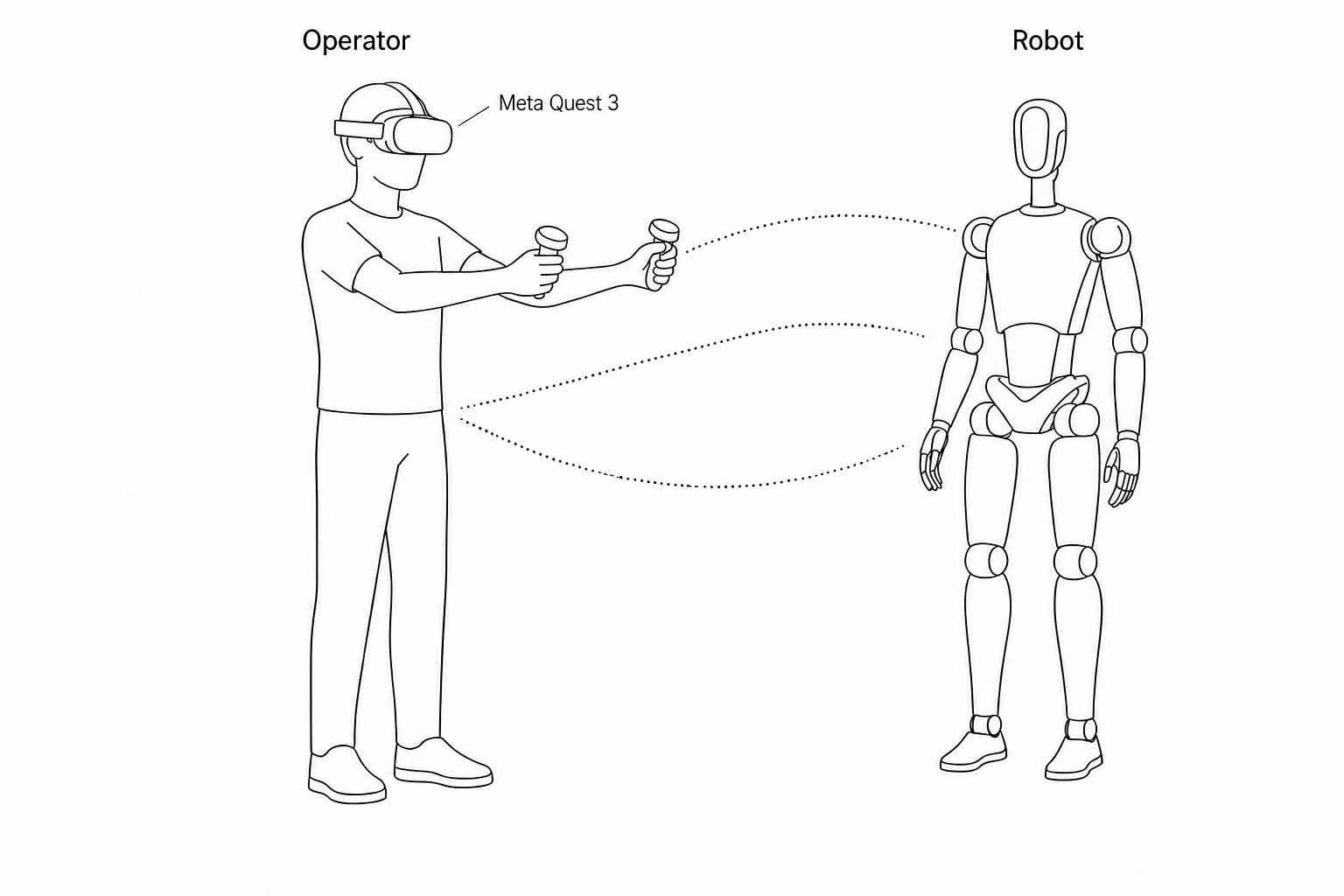
遥操作设备侧
| 设备 | 数量 | 说明 | 备注 |
|---|---|---|---|
| PND机器人 | 1 台 | Adam 系列机器人 | 配置遥操作程序 |
| 用户计算机 | 1 台 | / | 安装 Foxglove Studio |
| Meta Quest 3 / 3S | 1 台 | VR 头显 + 左右手遥控器 | 按照官方参考指南 设置 Meta Quest 3S 正确穿戴设备 |
首次使用设置
- 长按头显右侧的 电源键 3 秒开机。
- 完成官方指南中的 开箱 与 调整佩戴。
- 在移动端下载 Meta Horizon(中国大陆账号暂不支持,需切换海外账号),使用 Meta Horizon 与头戴设备配对,完成创建账号等初始设置。
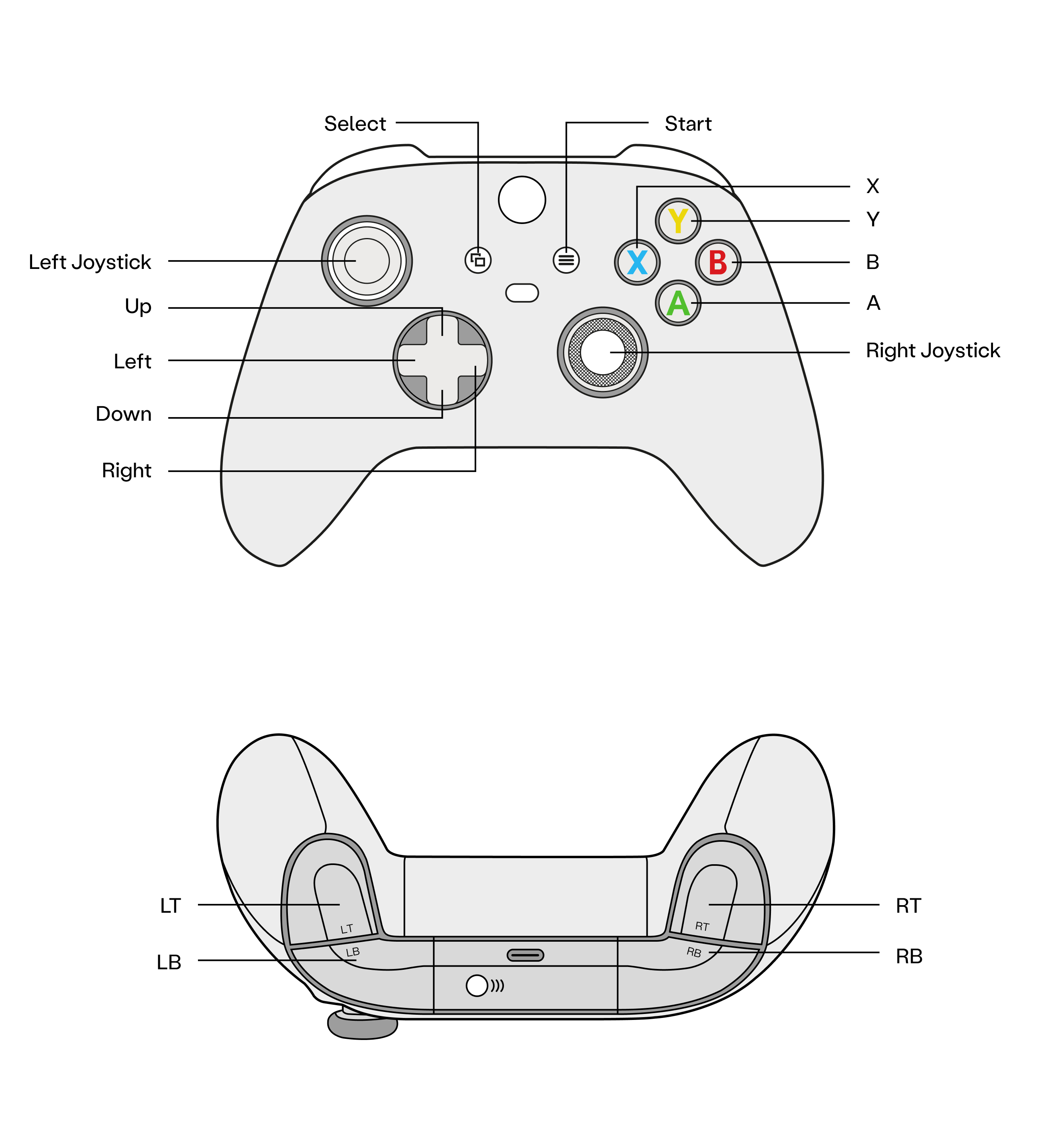
Meta 手柄说明
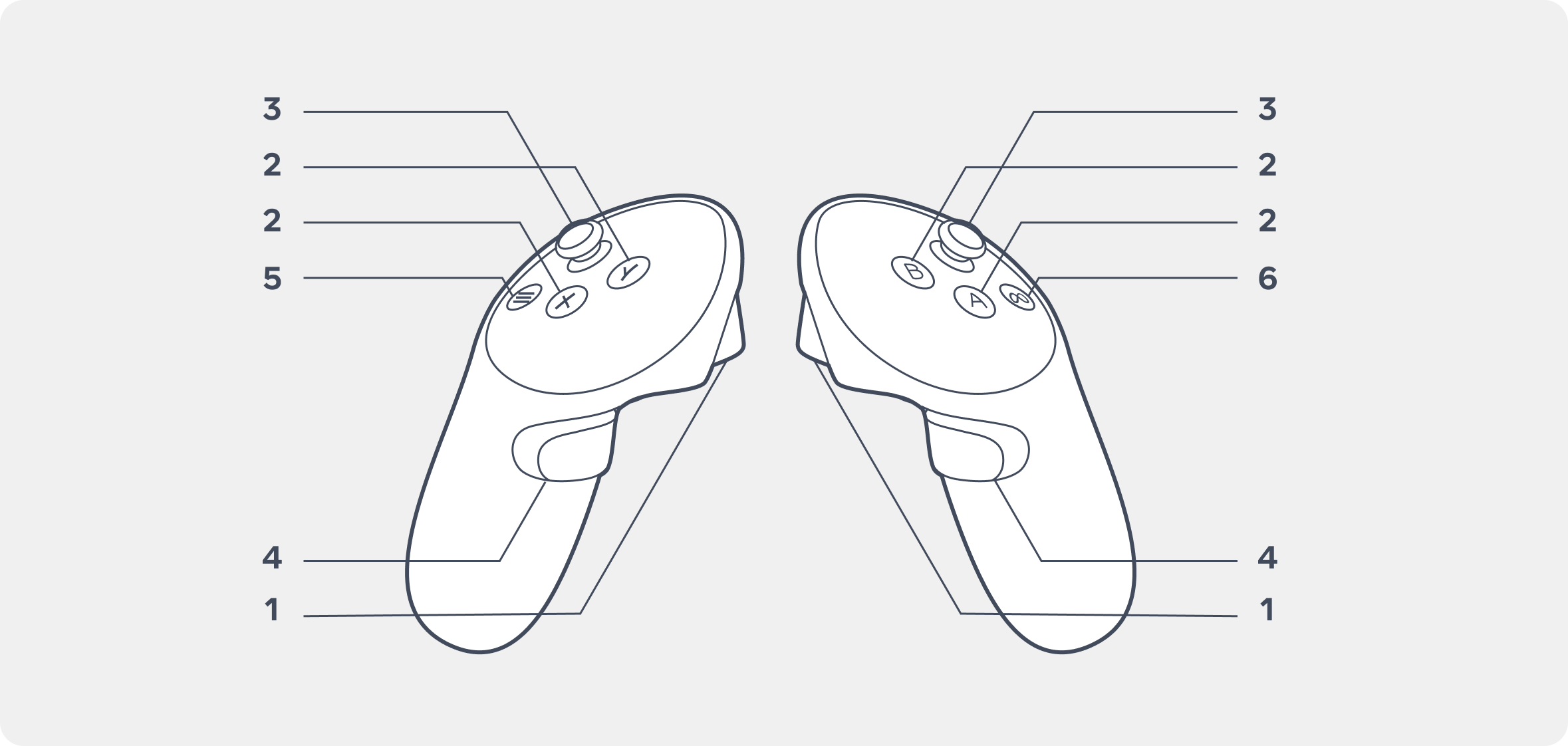
- Trigger buttons
- Y、X、A、B buttons
- Thumbstick
- Grip buttons
- Menu buttons
- Meta buttons
机器人侧
-
在用户PC端打开终端,连接机器人。
-
安装遥操作程序(需接入互联网,已安装可跳过)。
操作流程
运行遥操作程序
ssh pnd-humanoid@192.168.XX.XX # 将XX.XX替换为实际IP地址,位于遥控器手柄背面,输入初始密码:pndxyz
source /opt/pnd/pnd_teleop/setup_cli.bash
# 所有型号同一命令:
spteleop teleop adam_u webvr mink
Meta 头显端设置
- 参考 官方参考指南: 设置 Meta Quest 3S 佩戴设备。
- 在 设置 中选择与机器人连接至同一个 Wi-Fi 网络。

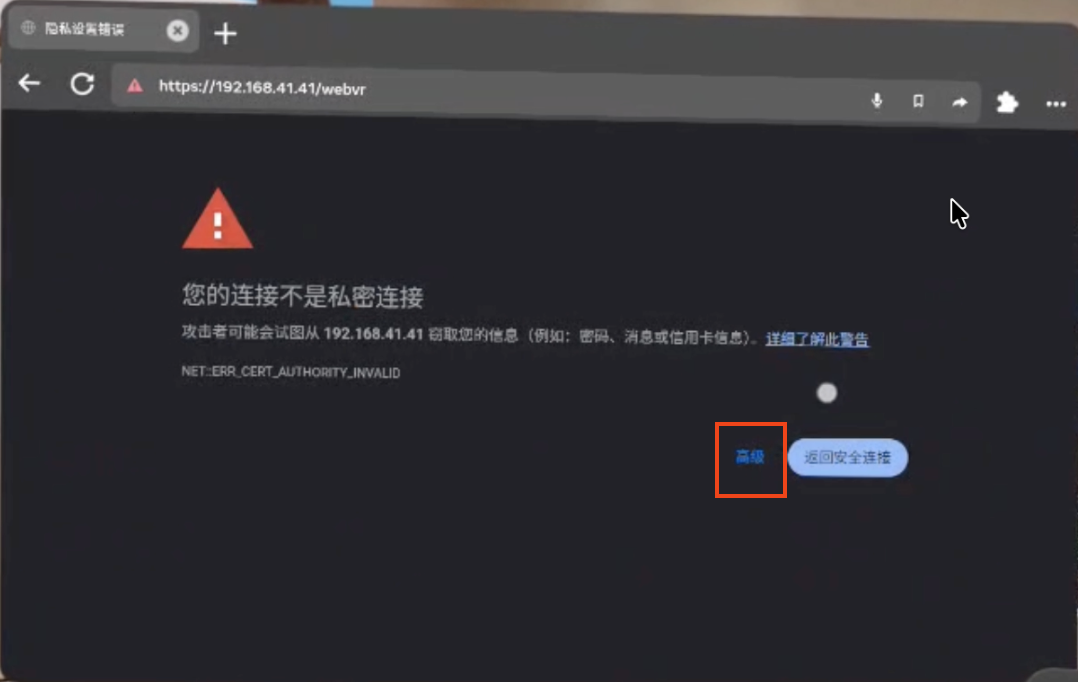
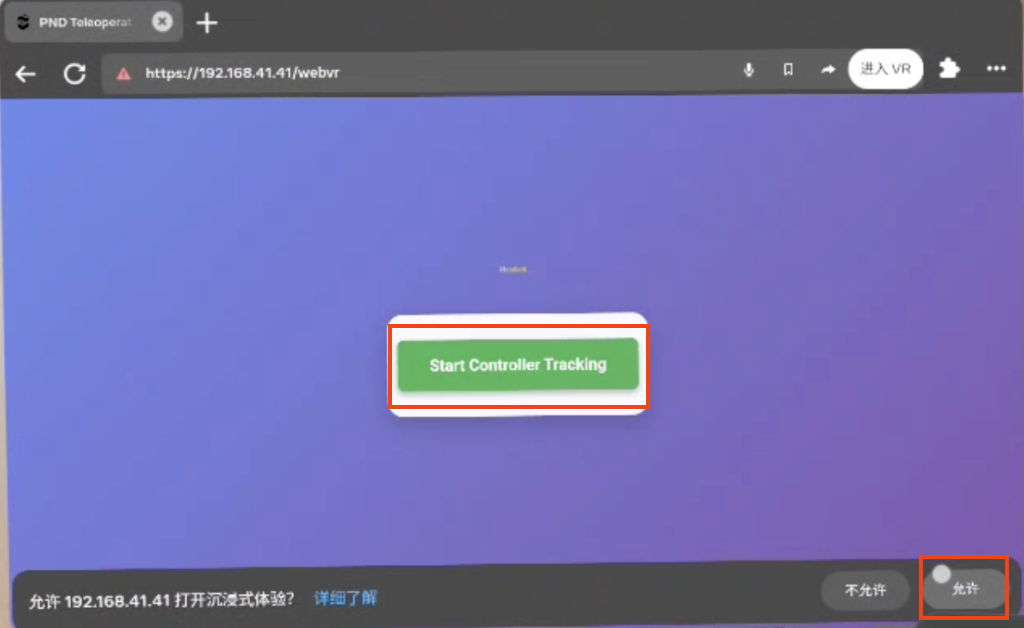
- 打开 浏览器,在地址栏输入
https://192.168.XX.XX/webvr(替换为实际机器人 IP)。
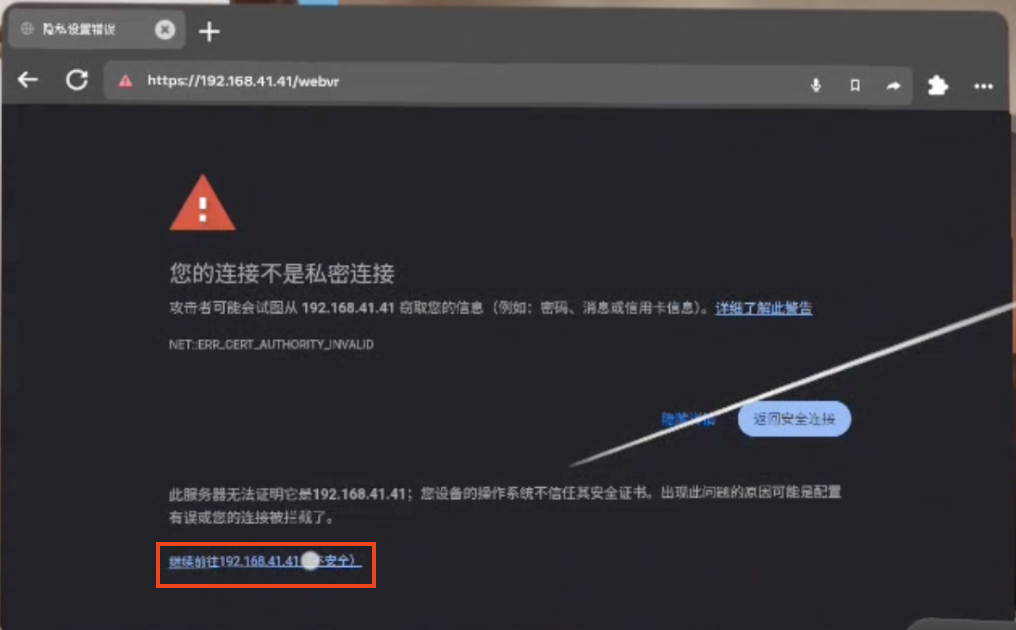
- 点击 高级 --> 继续前往192.168.XX.XX。
- 点击 Start Controller Tracking --> 允许 启动追踪。
可视化预览
- 在用户PC端安装并启动 Foxglove Studio。
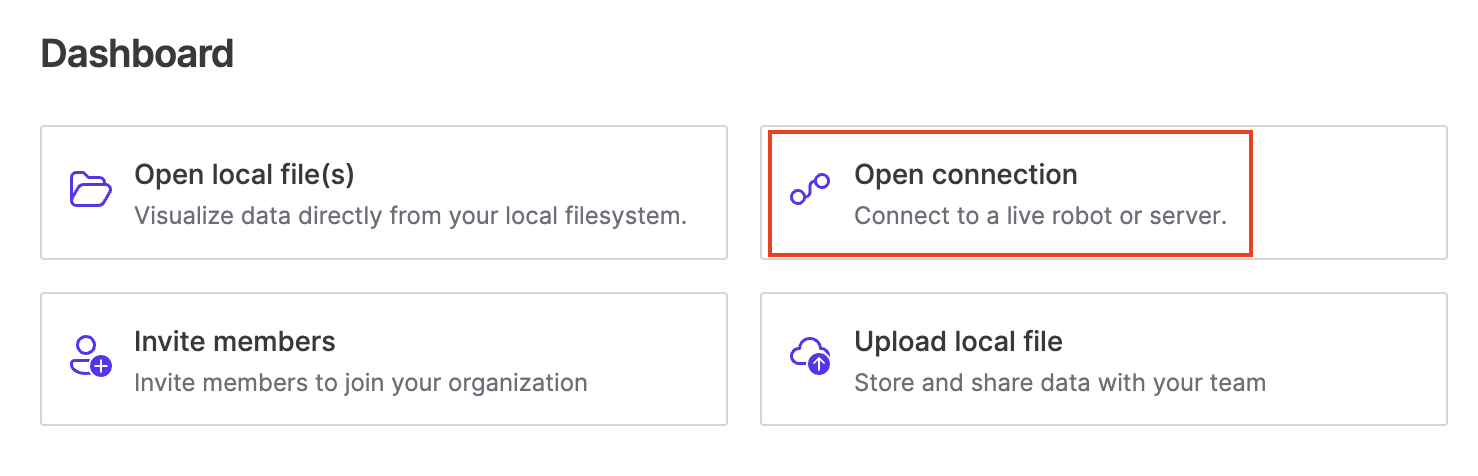
- 注册登录后点击 Open Connection。
- 通过WebSocket连接机器人:
ws://localhost:8765(将localhost替换为机器人实际IP)。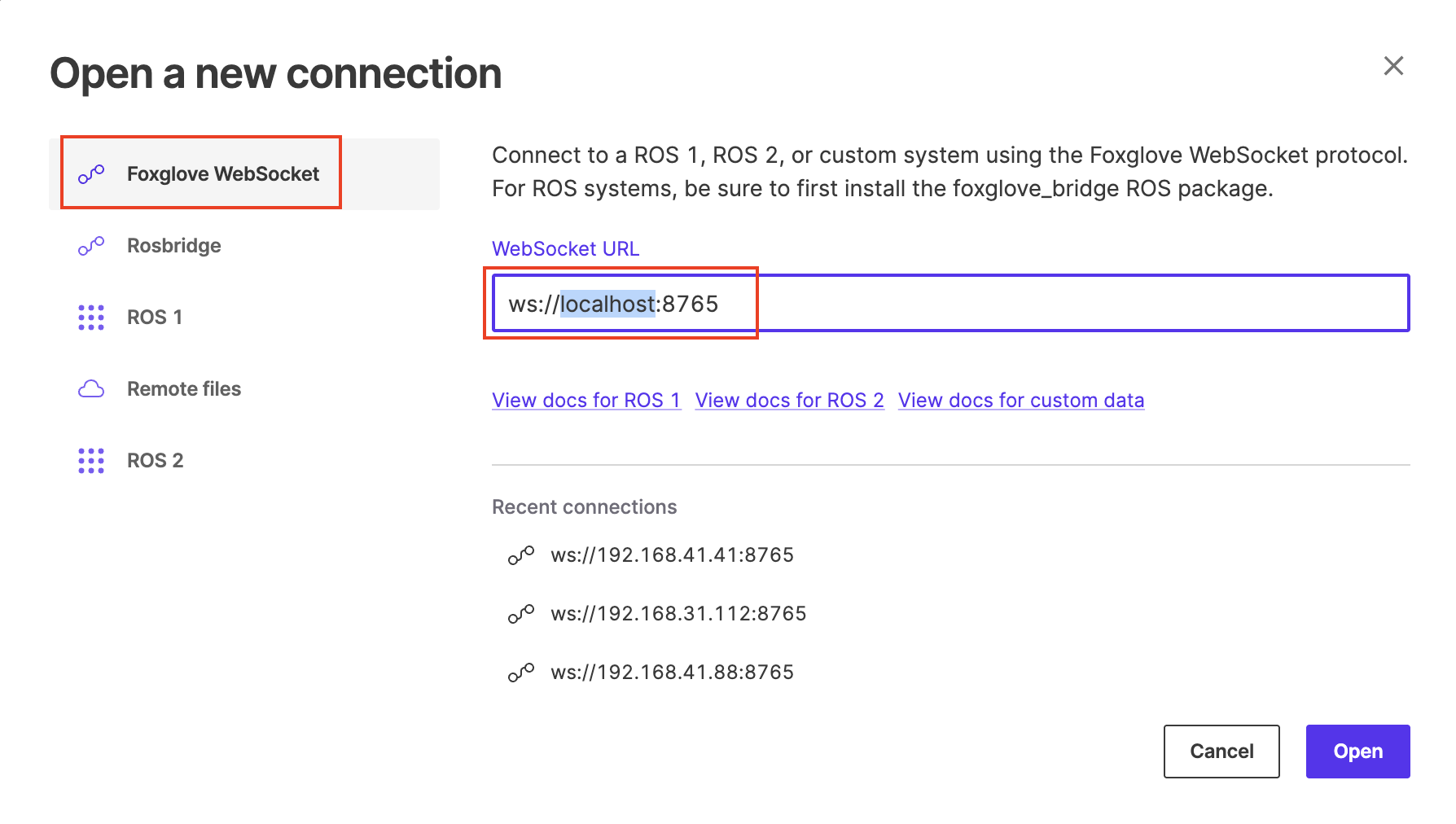
- 进入三维可视化面板,打开设置。
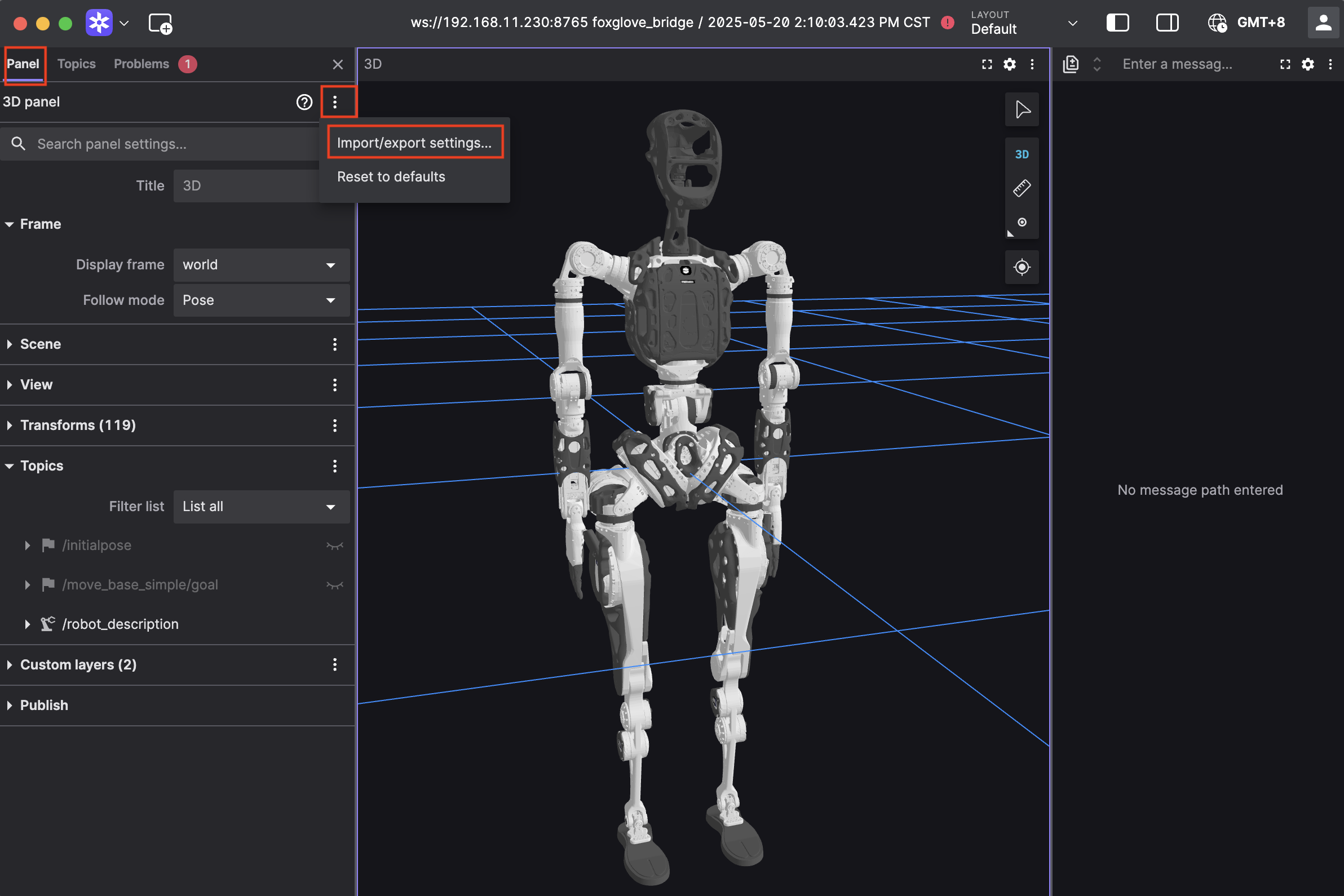
- 复制下方代码粘贴到到设置页面,点击 Apply。配置成功后即可实时观察机器人动作映射效果。
点击展开配置代码
{
"layers": {
"845139cb-26bc-40b3-8161-8ab60af4baf5": {
"visible": true,
"frameLocked": true,
"label": "Grid",
"instanceId": "845139cb-26bc-40b3-8161-8ab60af4baf5",
"layerId": "foxglove.Grid",
"size": 10,
"divisions": 10,
"lineWidth": 1,
"color": "#248eff",
"position": [
0,
0,
0
],
"rotation": [
0,
0,
0
],
"order": 1
}
},
"cameraState": {
"perspective": true,
"distance": 8.362406704377788,
"phi": 74.10829292531537,
"thetaOffset": 13.624928863620116,
"targetOffset": [
1.3462285617160472,
3.872395794634993,
-4.022926534191149e-17
],
"target": [
0,
0,
0
],
"targetOrientation": [
0,
0,
0,
1
],
"fovy": 45,
"near": 0.5,
"far": 5000
},
"followMode": "follow-pose",
"followTf": "world",
"scene": {
"meshUpAxis": "z_up",
"transforms": {
"showLabel": false,
"enablePreloading": true,
"axisSize": 0
},
"ignoreColladaUpAxis": true
},
"transforms": {},
"topics": {
"/robot_description": {
"visible": true
}
},
"publish": {
"type": "point",
"poseTopic": "/move_base_simple/goal",
"pointTopic": "/clicked_point",
"poseEstimateTopic": "/initialpose",
"poseEstimateXDeviation": 0.5,
"poseEstimateYDeviation": 0.5,
"poseEstimateThetaDeviation": 0.26179939
},
"imageMode": {}
}
标定流程
- 长按 Meta 右手柄
 键 约 3 秒重置位置。
键 约 3 秒重置位置。 - 保持标定姿势(站姿或坐姿二选一):双臂与地面平行,双手握持遥控器并且掌心向内侧,按下右手柄 A 键完成标定。
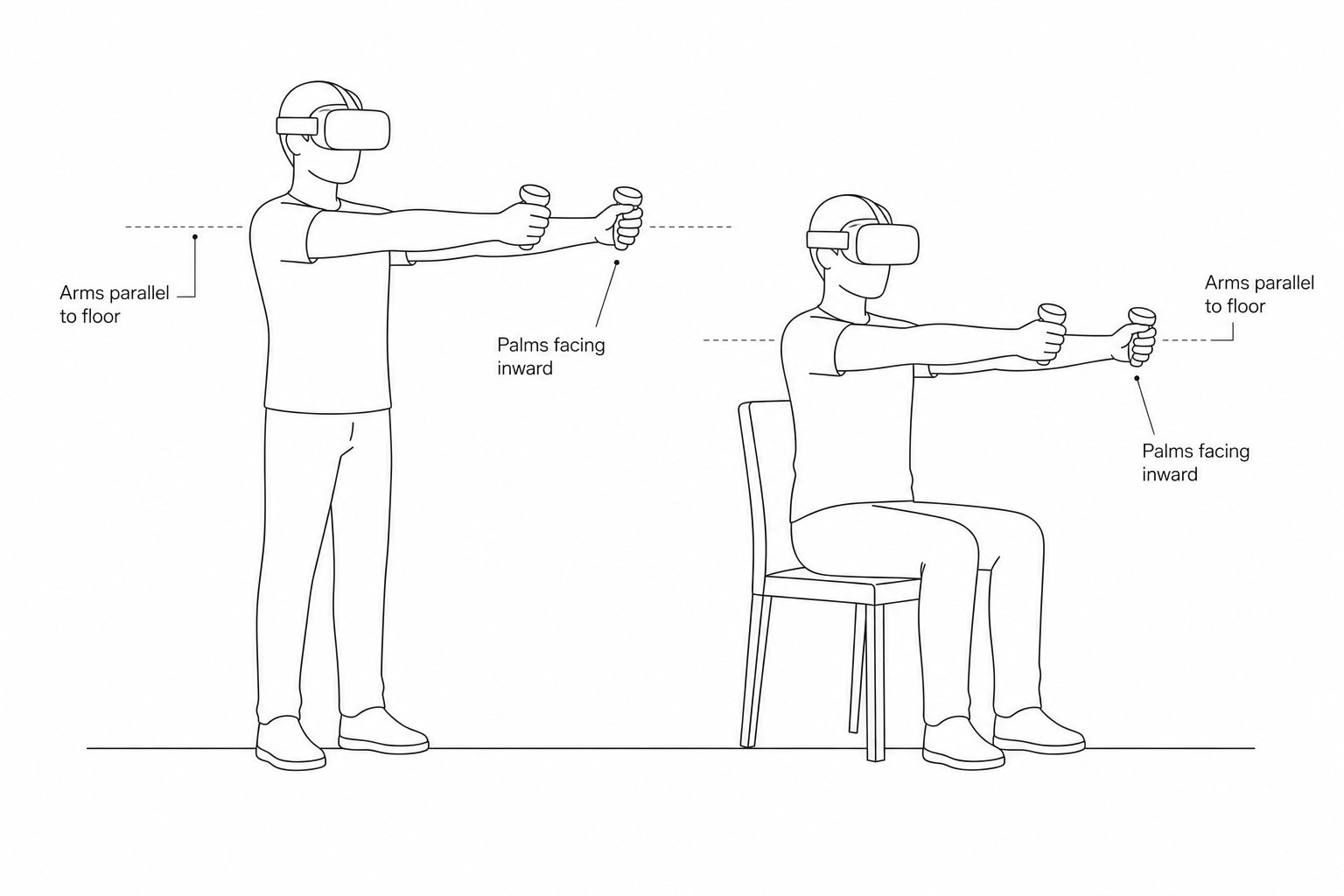
- 可在 Foxglove中 看到机器人模型开始跟随操作员动作,检查姿态如有异常则需重新标定。
注意
- 标定完成后开始遥操作时,请保持双脚位置固定。
- 如需移动位置,请先断开遥操作: B 键 ,移动后重新标定。
实机操作
警告
- 实机操作存在一定风险,请确保机器人周围3米范围内无障碍物
- 仅在遥操作程序正常运行且预览效果符合预期时,方可接入实机控制
- 接入数据前确认预览中的关节位置与实际机器人姿态基本一致
- 遥操作期间禁止切换其他运行模式(如行走、跑步等演示程序)
- 遇到异常情况立即执行以下紧急操作:
- LT+B:进入阻尼模式
- LB+RB:执行器断电
各型号实机操作
实机手部映射
- 右手柄 A:标定
- 右手柄 B:断开遥操作
- 右手柄 Meta:重置 VR 位置
- 右手柄 A 触摸:右手大拇指旋转
- 左手柄 X 触摸:左手大拇指旋转
- 右手柄 Trigger:右手拇指、食指开合
- 左手柄 Trigger:左手拇指、食指开合
- 右手柄 Grip:右手中指、无名指、小指开合
- 左手柄 Grip:左手中指、无名指、小指开合
最后更新:2026-05-20