Adam-U Ultra
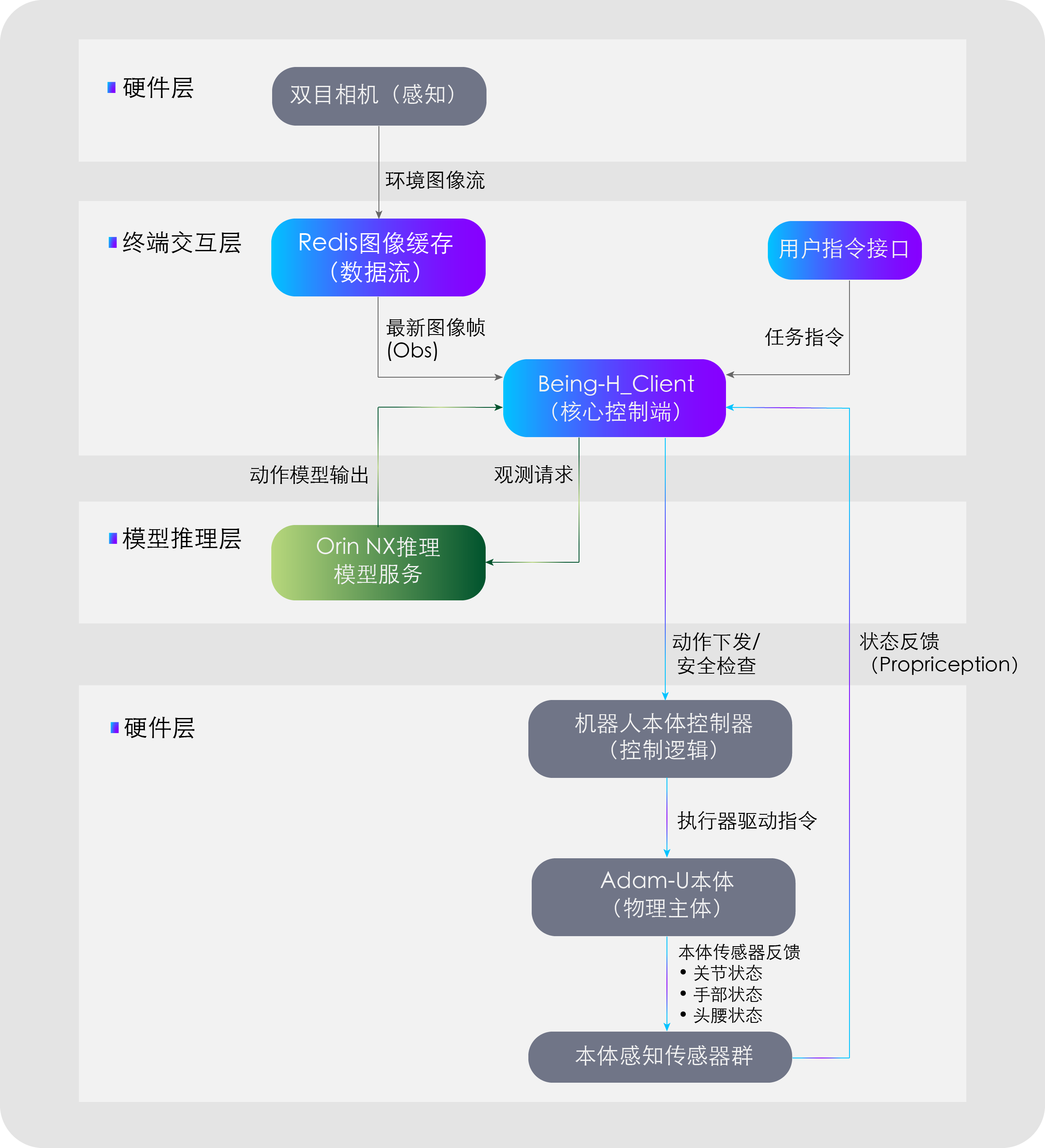
本方案基于机器人本体 Adam-U,集成 VLA(视觉-语言-动作)大模型 Being-H。不同于传统的预设脚本机器人,该系统通过 VLA 模型实现从视觉输入到动作执行的端到端控制,使机器人能够自主完成“桌面拾取并放置入盒”(Pick & Place)的任务循环。
核心特性
- 开箱即用:配合专用 Demo Kit 与加密软件包,实现自动化分拣循环,无需二次开发。
- 全自动循环:启动后无需人工干预,自动执行识别、抓取、入盒的全流程。
- 高容错性:具备非致命异常处理能力(如单次抓取失败),系统会自动尝试后续目标而非直接终止。
系统架构
配置与环境
硬件配置
| 组件 | 要求 |
|---|---|
| 机器人本体 | Adam-U Ultra |
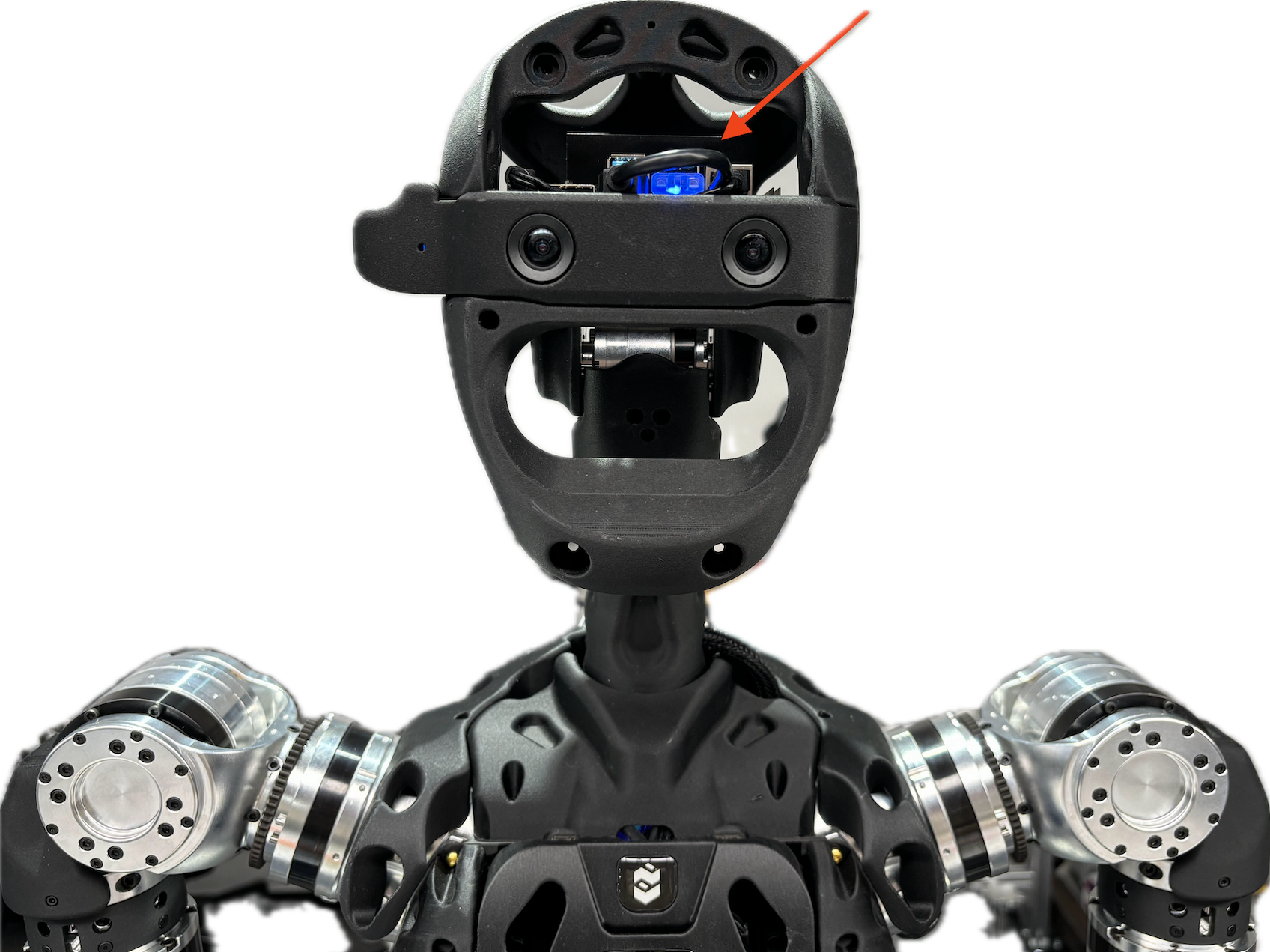
| 授权设备 | 专用加密狗(插入机器人头部 USB 接口) |
| 交互终端 | 建议带显示屏用于可视化操作 |
网络配置
确保用户计算机与机器人处于 同一网段。
- 默认 IP 示例:
192.168.XX.XX
物理环境准备
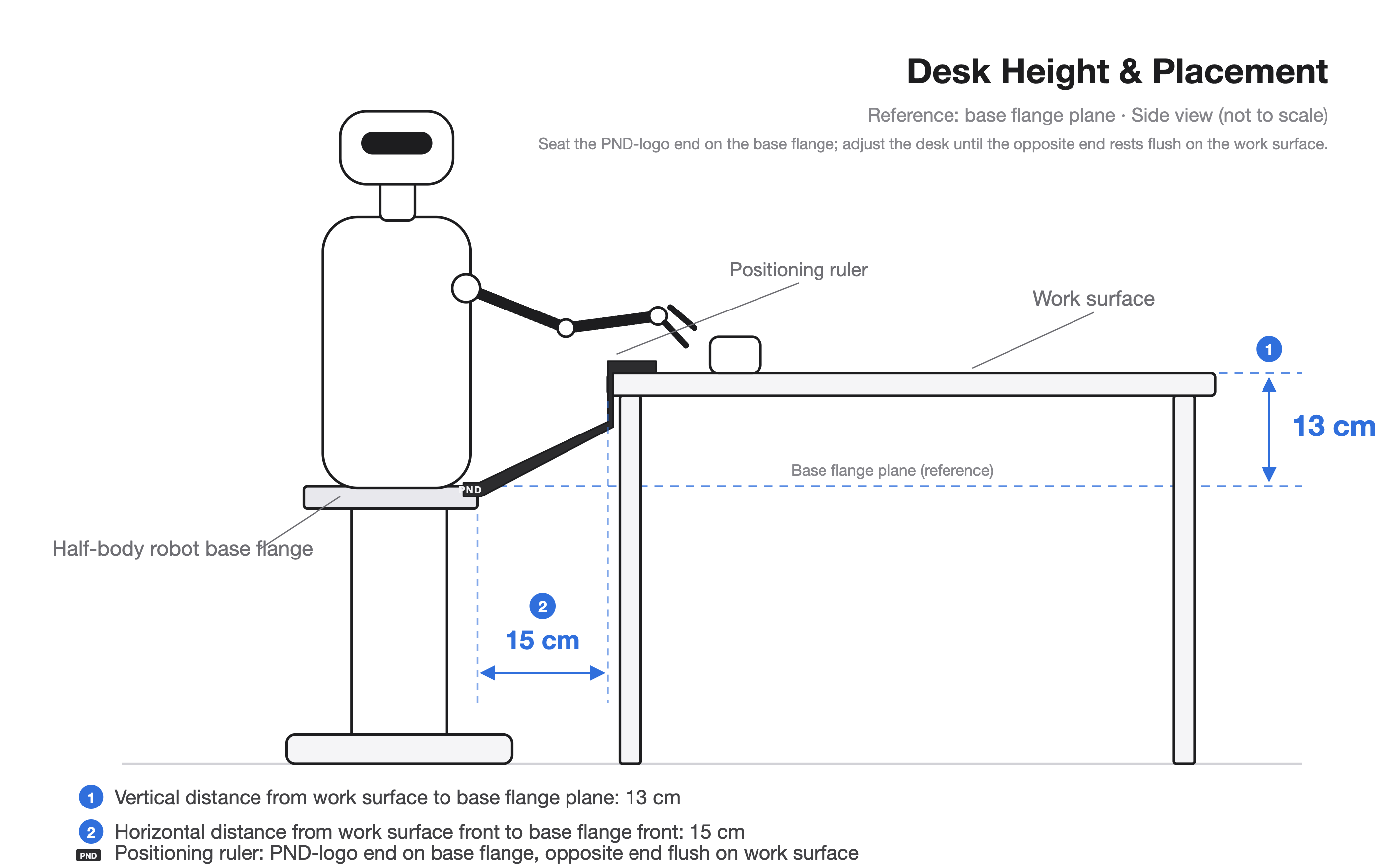
在机器人本体前方放置桌子,使机器人本体位于桌子居中位置,使用定位尺调节并固定机器人与桌子距离。
1. 桌面尺寸与视野
-
推荐尺寸:不小于 80cm × 100cm,以覆盖机器人主要动作范围并提供清晰视野。
-
最小尺寸:不小于 60cm × 60cm(尺寸过小会导致视野内桌面占比不足,影响识别表现)。
-
视觉要求:桌面应占据机器人视野的主要区域,操作物体与盒子必须完全位于可见范围内。
2. 空间相对位置
将定位尺印有 PND logo一端贴合机器人半身底座法兰放置,调整桌子水平与垂直距离使得定位尺无logo一端贴合桌面放置:
3. 光照与背景
-
光照:避免强逆光、频闪或极暗环境。
-
材质:桌面应尽量避免强镜面反射或大面积透明材质。
-
环境隔离:运行时避免障碍物和非工作人员进入工作空间遮挡视野。
真机控制
Step 1: 环境初始化
1.1 按照标准 开机流程 启动 Adam-U。
1.2 将加密狗插入机器人正面头部 USB 接口,指示灯 蓝色常亮 表示识别成功。
Step 2: 启动感知与模型服务
注意:请确认用户计算机与机器人处于同一网段,参考网络连接。
打开终端 1(视觉感知):
# 连接机器人NUC
ssh pnd-humanoid@192.168.XX.XX # 将XX.XX替换为实际IP地址,位于遥控器手柄背面,输入初始密码:pndxyz
# 连接机器人NX
ssh pnd-humanoid@10.10.20.126 # 输入初始密码:pndxyz
bash run_zed.sh
打开终端 2(模型服务端):
# 连接机器人NUC
ssh pnd-humanoid@192.168.XX.XX # 将XX.XX替换为实际IP地址,位于遥控器手柄背面,输入初始密码:pndxyz
# 连接机器人NX
ssh pnd-humanoid@10.10.20.126 # 输入初始密码:pndxyz
docker restart being-h
docker exec -it being-h bash
cd Being-H_Server/
bash scripts/deploy/orin_nx/run_server_adamu.sh
-
加载中:终端显示
Loading model from /root/Being-H_Model/Adam-U_Pick。 -
启动成功:等待约 2min,终端显示
Server is ready and listening on tcp://0.0.0.0:8888。
Step 3: 运行交互逻辑
打开终端 3(客户端交互):
# 连接机器人NUC
ssh pnd-humanoid@192.168.XX.XX # 将XX.XX替换为实际IP地址,位于遥控器手柄背面,输入初始密码:pndxyz
cd Being-H_Client/
bash scripts/start
-
终端返回界面如图,表示控制主线程启动成功。
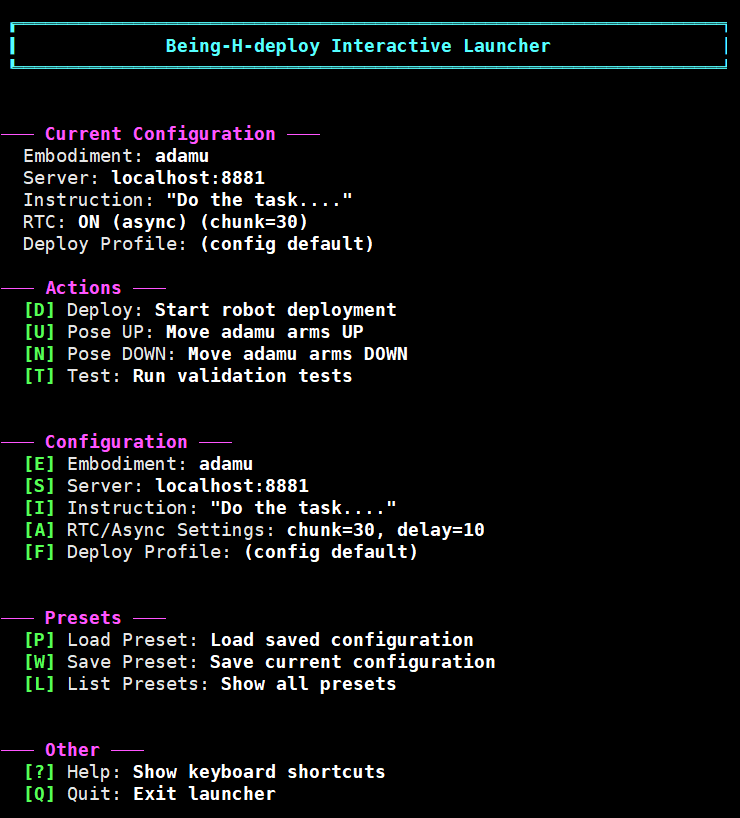
Step 4: 按键交互
在终端 3 界面使用键盘控制,每步操作后请根据提示按 Enter 键确认:
4.1 配置阶段
-
按
P键:进入配置选项。 -
按数字
1键:选择型号。
4.2 准备阶段
警告
该阶段按键将触发机器人动作,请确保物理环境已准备完毕,机器人周围 1 米内无障碍物。
-
物体摆放建议:清空桌面,将 Demo Kit 方盒放置在桌面居中且靠近机器人的位置。建议操作员每次放置一个物品,机器人抓取时再放置下一个,实现左右手交替。
-
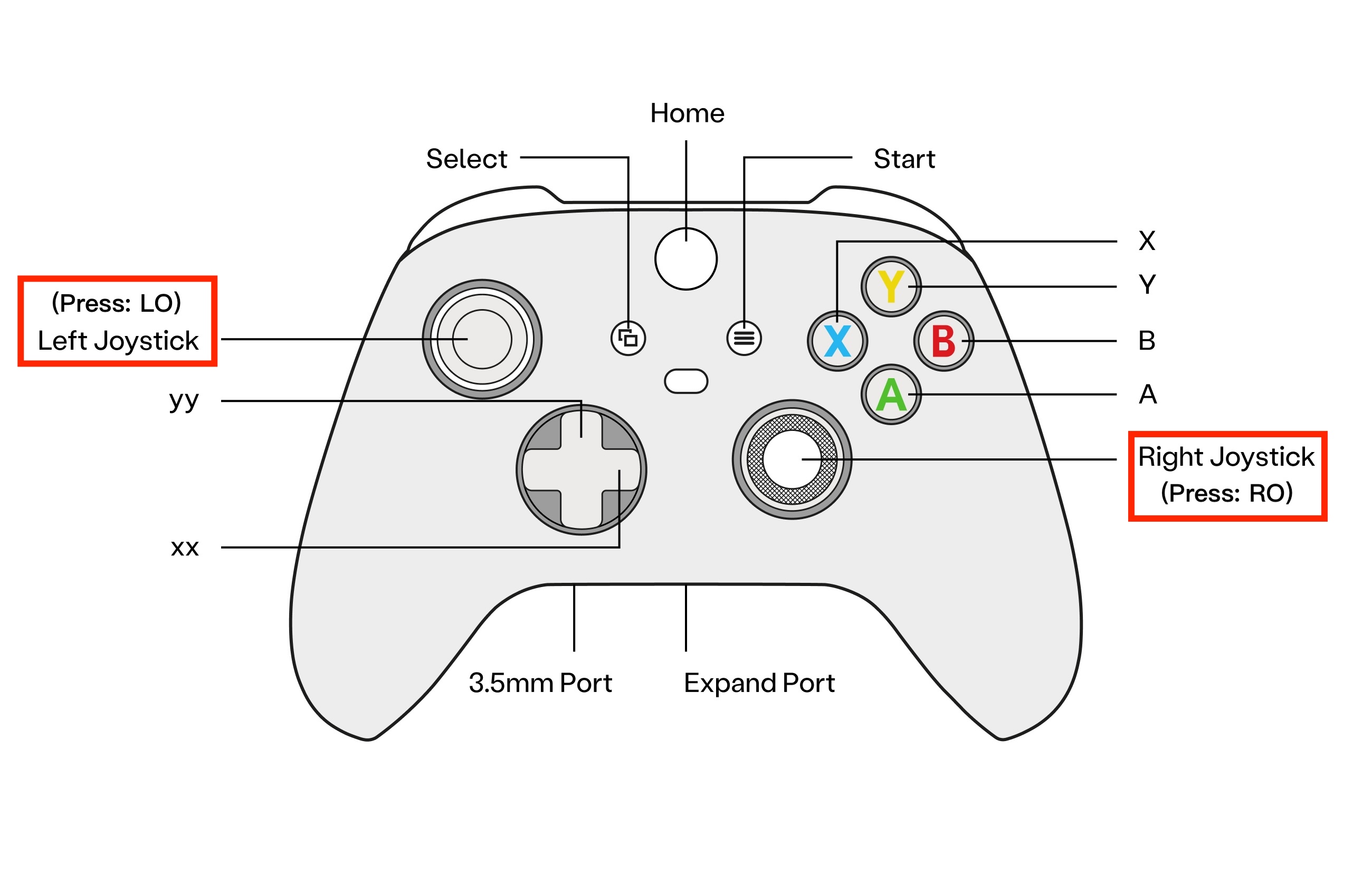
进入开发者模式:按遥控器
LO+RO(垂直下压摇杆)。RCU 指示灯由紫色慢速呼吸变为 蓝色慢速呼吸 即成功。
- 初始化姿态:按
U键。Adam-U 执行“抬起手臂”。
- 部署准备:按
D键。Adam-U 执行“俯身低头”。
4.3 运行阶段
- 开始任务:按
S键。运行 Pick & Place 任务。
- 复位:按
R键。停止抓取,可再按S键 重新开始。
4.4 结束阶段
- 按
R键复位 -> 按Ctrl+C回到上层 -> 按N键。Adam-U 执行“放下手臂”。
查看相机画面
将机器人头部计算单元 NX 的 HDMI 接口连接显示屏,USB/Type C 接口连接键盘和鼠标。
- 在用户计算机上停止运行“终端 1”,保留“终端 2”和“终端 3”。
- 在 NX 中打开终端,开启可视化:
常见问题排查 (FAQ)
| 现象 | 可能原因 | 建议操作 |
|---|---|---|
| 软件提示授权异常 | 未插加密狗或接口接触不良 | 重新插拔加密狗,检查指示灯状态。 |
| 频繁抓取失败 | 环境光照或位置偏移 | 1. 检查是否有强光直射相机; 2. 重新校准桌面与法兰的相对距离。 |
| 模型运行成功,机器人无反应 | 物体超出视野 | 通过外接显示器查看相机画面,重新调整物体位置。 |
| 程序运行中崩溃 | 硬件过热或系统资源占用过高 | 检查散热是否正常,关机降温后重试。 |
最新修订日期: 2026-04-09