执行器参数说明
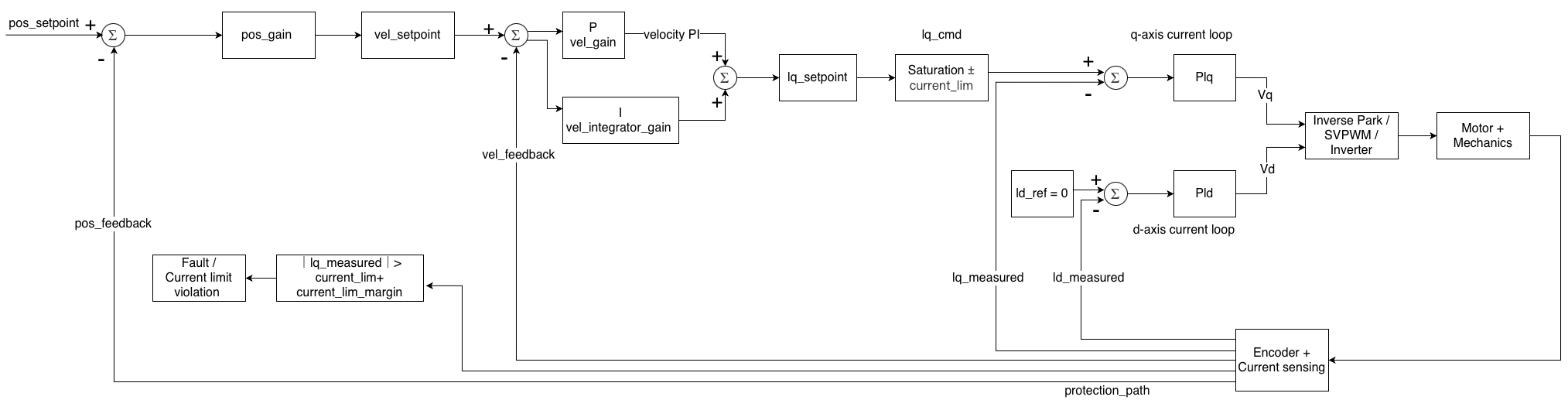
电机驱动内部控制环路
Current Limit 与 Current Limit Margin
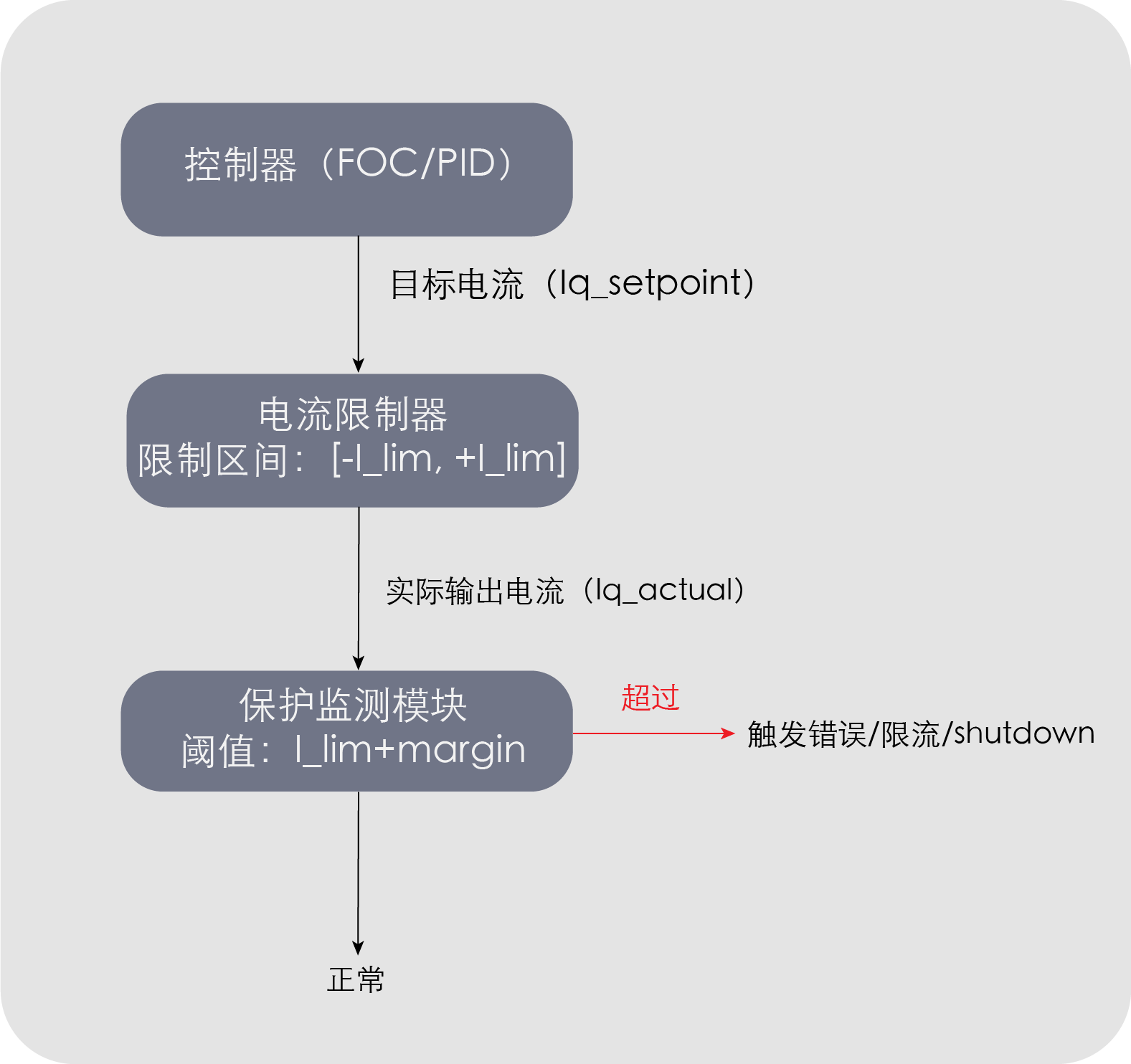
可以把 current limit 和 current limit margin 理解成:
"目标电流限制" + "保护冗余边界"
它们共同定义了电流控制器允许工作的安全区间。
📌 基本概念
current_lim(电流限制)
👉 控制器"正常允许输出的最大电流"
current_lim_margin(电流余量)
👉 给控制器预留的"缓冲空间",用于应对瞬时波动 / 控制误差
实际硬限制(绝对上限)
current_lim + current_lim_margin
👉 超过该上限会触发保护(如 error / current limit violation)
框图(逻辑结构)
🧩 详细说明
1️⃣ current_lim 的作用(软限制)
在控制环(FOC)中:
Iq_cmd = clamp(Iq_target, -current_lim, +current_lim)
👉 即 Iq_setpoint 会被限制在 ±current_lim 范围内
2️⃣ current_lim_margin 的作用
用于检测"实际测量电流"是否异常:
可能误差来源: - ADC 误差 - PWM 延迟 - 反电动势 - 动态冲击
👉 因此允许短时间超过 current_lim
3️⃣ 触发保护条件
|Iq_measured| > current_lim + current_lim_margin
👉 会触发:
ERROR_CURRENT_LIMIT_VIOLATION
📊 示例
假设:
- current_lim = 40 A\
- current_lim_margin = 8 A
| 区间 | 含义 |
|---|---|
| 0 ~ 40A | 正常工作 |
| 40 ~ 48A | 允许瞬态(margin 区) |
| >48A | ❌ 触发保护 |
⚠️ 工程意义
current_lim 决定
👉 电机最大输出扭矩
Torque ∝ Iq
current_lim_margin 决定
👉 系统稳定性 / 鲁棒性
- 太小:容易误触发保护
- 太大:可能导致过流损坏 MOS 或电机
🧠 总结
- current_lim → "期望的最大电流"
- current_lim_margin → "允许的短暂超调范围"
🚀 工程建议
适用于:
- 高动态运动(跳跃 / locomotion)
- 强非线性控制(RL 控制)
建议配置:
- margin 设置为 20% ~ 30%
- 同时配合:
- 母线电流限制(bus current)
- 温度保护
- torque limiter