遥操作概述
专为 Adam 系列机器人设计的实时动作映射框架,通过高精度动作捕捉设备实现自然流畅的遥操作体验
支持 Noitom PN Link、Meta Quest 3 / 3S 与 PICO 4 Ultra Enterprise 等多种输入源
效果展示
多设备适配
遥操作的动作数据可以来自多种动捕或 VR 设备。请按实际硬件选择对应文档。
| 设备 | spteleop 动捕参数 |
优化算法 | 当前适用机型 | 说明文档 |
|---|---|---|---|---|
| Noitom PN Link | noitom |
pinocchio |
Adam U / Pro / SP | Noitom PN Link |
| Meta Quest 3 / 3S | webvr |
mink |
Adam U / Pro | Meta Quest 3 / 3S |
| PICO 4 Ultra Enterprise | pico |
mink |
Adam U / Pro | PICO 4 Ultra Enterprise |
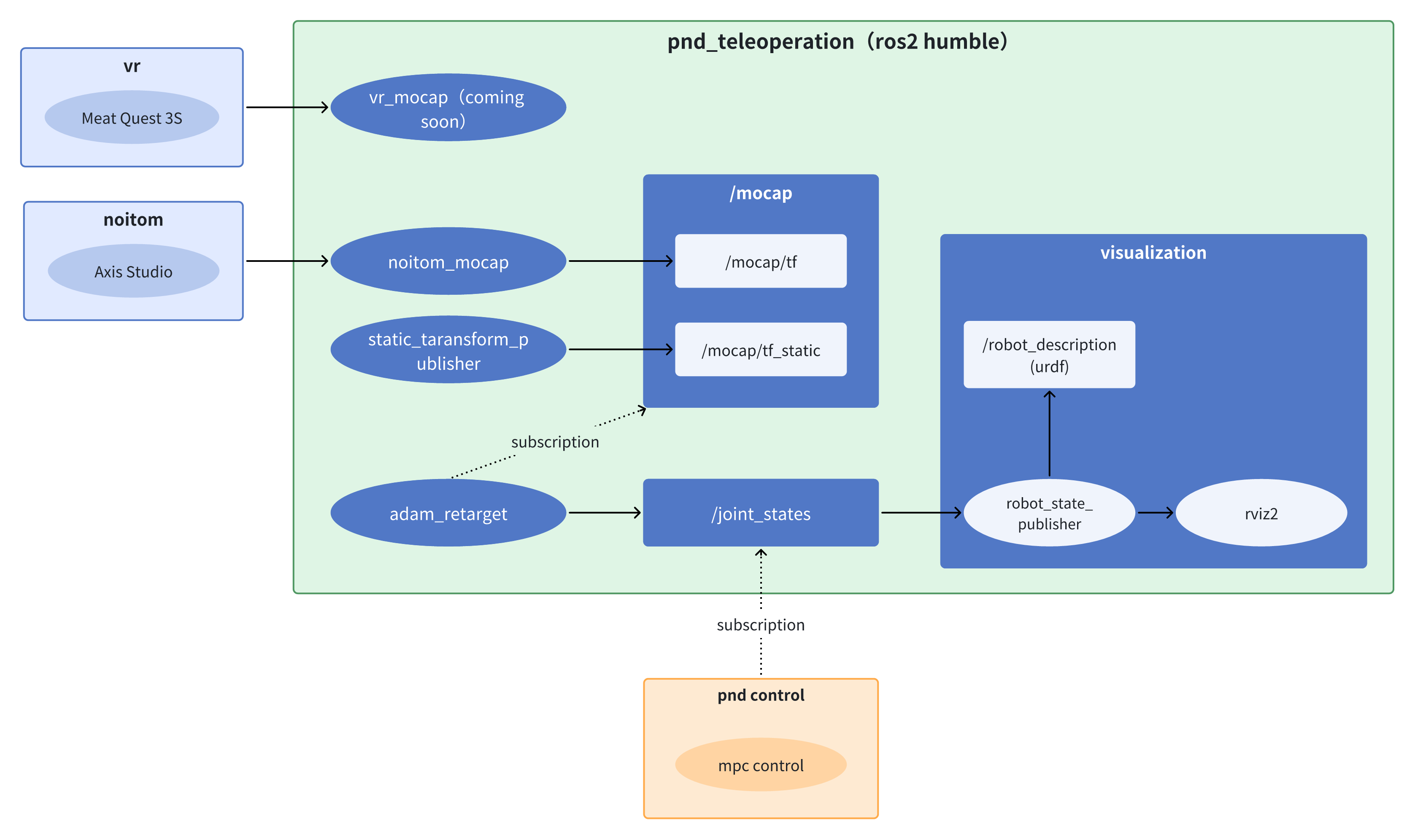
系统架构
系统采用分布式架构设计:
- 动作输入层:Noitom PN Link(Windows + Axis)、Meta Quest 3 / 3S(浏览器 WebVR)或 PICO 4 Ultra Enterprise。
- 控制核心层:运行于机器人内置 NUC 的
pnd_teleoperation与pnd-control。 - 数据链路:基于 ROS 2 Humble 的实时数据总线。
最后更新:2026-05-20