开启机器人第一视角
通过 WebVR 功能,可将机器人第一视角视频流实时传输至 PC 浏览器及 VR 头显,实现沉浸式远程观察与操作体验。本文将介绍环境准备、设备连接方式及具体操作流程。
环境要求
提示
请保持机器人出厂配置不变——出厂路由器的 WAN 口需接入互联网,机器人将自动连接其 Wi-Fi。 另新增一台用户路由器,用于本地局域网通信配置。
-
头显设备:Meta Quest 3 / 3s
- 配备 Type-C to 网线转接头连接用户路由器
- 关闭 Wi-Fi
-
用户路由器:作为独立局域网使用(区别于机器人出厂路由器)
- 网线连接 VR 头显设备
- 在路由器管理中将 VR 头显 IP 设置为
10.10.20.XX网段 - 网线连接用户 PC
- 网线连接机器人背部 NUC 网口
-
用户 PC
- 网线连接用户路由器
- 手动设置有线网络 IP 为
10.10.20.XX网段
-
机器人
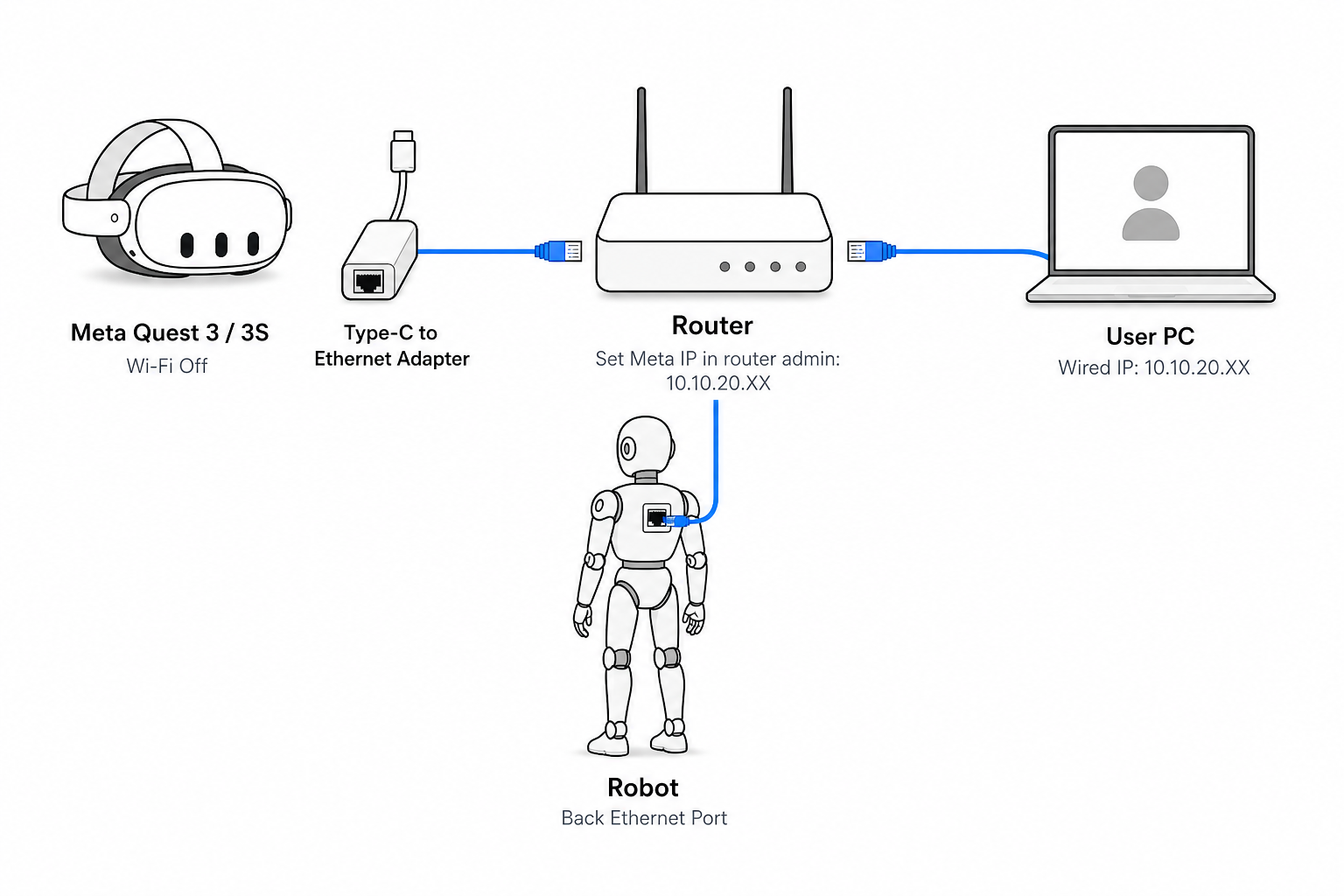
设备连接拓扑
图中所示路由器为用户路由器
操作流程
运行遥操作程序
在用户 PC 终端执行以下命令:
ssh pnd-humanoid@10.10.20.127 # 输入初始密码:pndxyz
source /opt/pnd/pnd_teleop/setup_cli.bash
pteleop setup ssh # 按提示回车,输入初始密码:pndxyz
spteleop teleop adam_u webvr mink
可视化视频流(PC端)
- 在用户 PC 上打开浏览器访问:
- 点击: 连接 → 启动流 → 显示视频
同步头显画面(VR端)
- 在 Meta 头显中打开浏览器访问:
- 点击: Start Controller Tracking → 允许
- 透视画面显示后: 按 Meta 左手柄 Y 键 开启 / 关闭视频流画面