数据录制与回放
示例 1:启动 foxglove_bridge 并录制数据
远程开启 ROS 2 完整话题的 MCAP 录制,数据默认存储至 ~/.ros/bags/ 目录下。Foxglove 支持该 MCAP 包的回放(默认仅包含消息数据)。如需同步显示机器人模型动画,请参考 示例 2。
-
连接机器人NUC:
-
开启桥接模式并开始录制:
Ctrl+C结束录制。# 请按型号选择对应命令: # Adam Pro ./pnd_bridge.sh --enable-foxglove-bridge --enable-record --robot adam_pro --domain-id 0 # Adam U ./pnd_bridge.sh --enable-foxglove-bridge --enable-record --robot adam_u --domain-id 0 # Adam SP ./pnd_bridge.sh --enable-foxglove-bridge --enable-record --robot adam_sp --domain-id 0 # Adam Lite ./pnd_bridge.sh --enable-foxglove-bridge --enable-record --robot adam_lite --domain-id 0 -
查找录制好的文件:
可以看到以录制时间命名的文件。 -
在本机打开一个新的终端,下载录制文件(请将
YYYYMMDDHH_MMSS替换为实际的文件名): -
使用谷歌浏览器访问 Foxglove Dashboard 或打开 Foxglove Desktop 客户端。
-
点击 Open local file,导入
YYYYMMDD_HHMMSS.mcap文件。
提示
- Domain ID 匹配:请确保
--domain-id参数与系统环境变量 ROS_DOMAIN_ID 严格一致。 - WebSocket 服务:开启
--enable-foxglove-bridge后,机器人端将在 8765 端口启动 WebSocket 服务。本地 Foxglove 客户端连接该端口即可实现实时数据监控。
示例 2:本地回放 MCAP 包及加载机器人模型
-
在本机打开一个终端,同步远程数据至本地:
-
启动轻量级文件服务器(默认地址:http://127.0.0.1:8000):
-
使用谷歌浏览器访问 Foxglove Dashboard 或打开 Foxglove Desktop 客户端。
-
点击
Open local file,导入YYYYMMDD_HHMMSS.mcap文件。 -
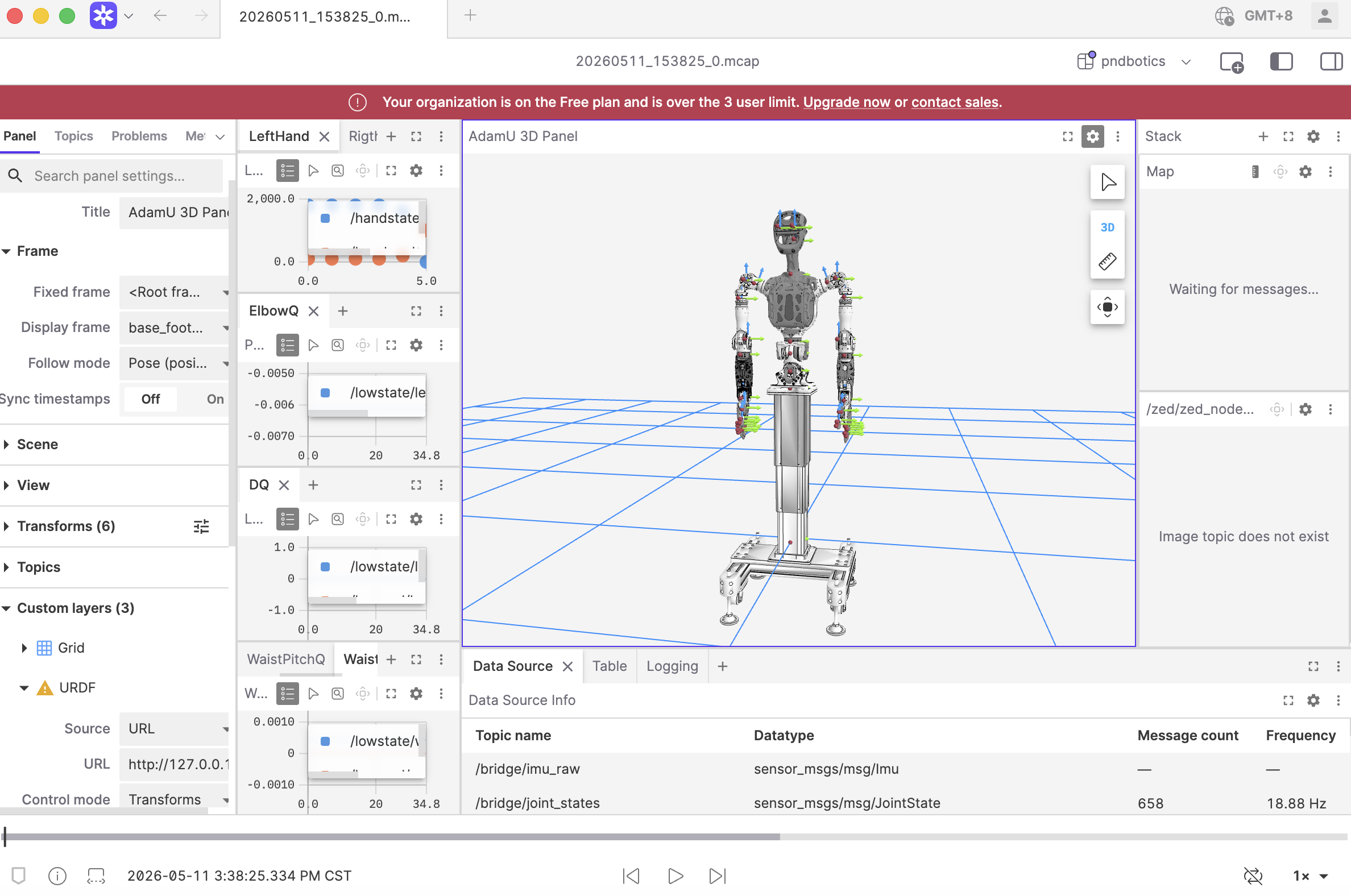
在 Foxglove 界面中,点击 3DPanel --> Custom Layers --> URDF:
- Source:选择 URL。
- URL:填入对应机型的 URDF 路径,例如:
http://127.0.0.1:8000/adam_u/adam_u.urdfhttp://127.0.0.1:8000/adam_pro/adam_pro.urdf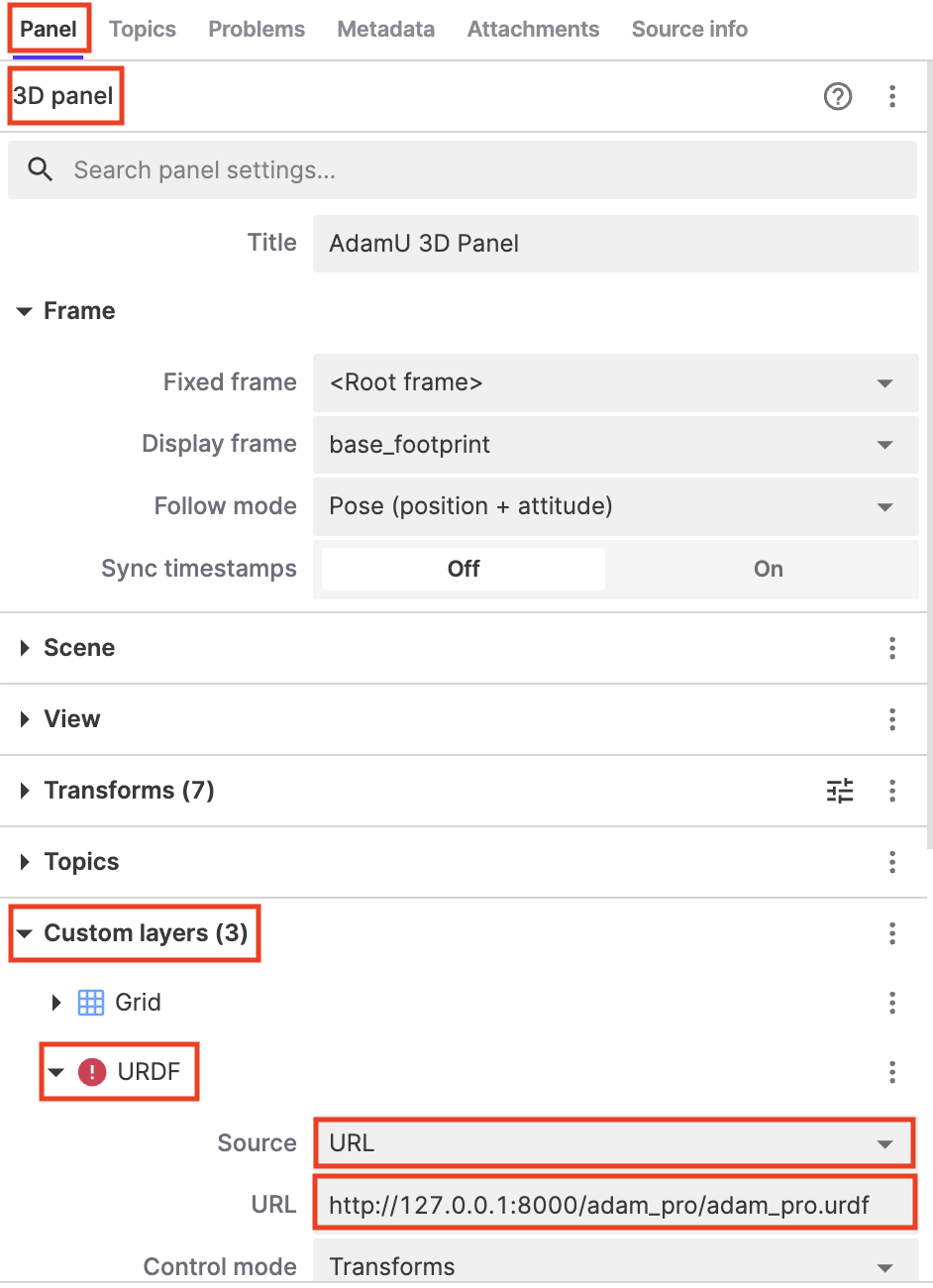
配置完成后,可使用界面底端按钮播放/暂停: