Sim2Real
本文介绍了训练完成后,将策略部署到实物机器人,实现运动控制。
真机连接
- 使用网线连接机器人与用户计算机,机器人网口位于背部
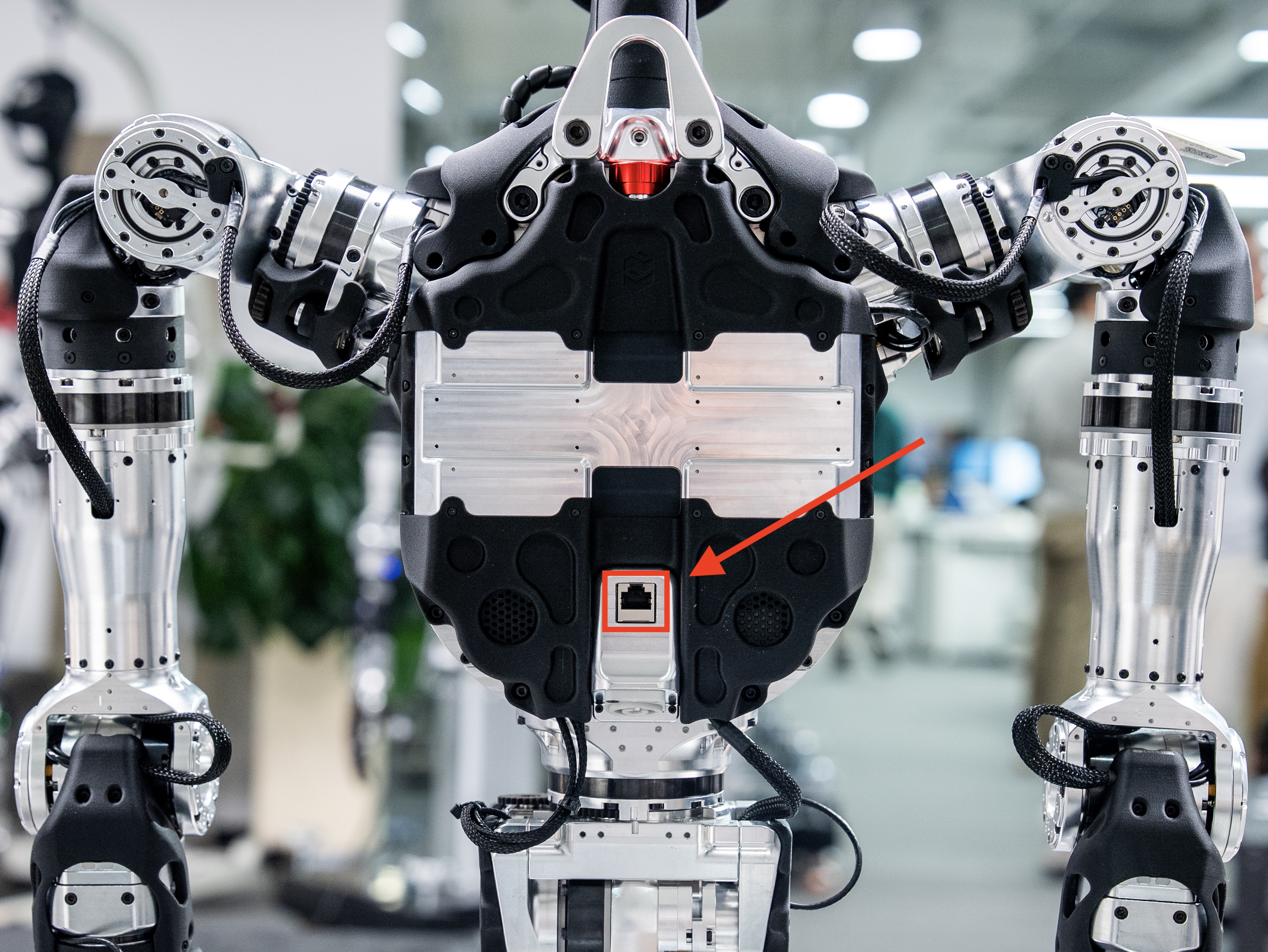
- 在用户计算机上设置网络与机器人同一网段,修改IP地址如:
10.10.20.XXX

开发者模式
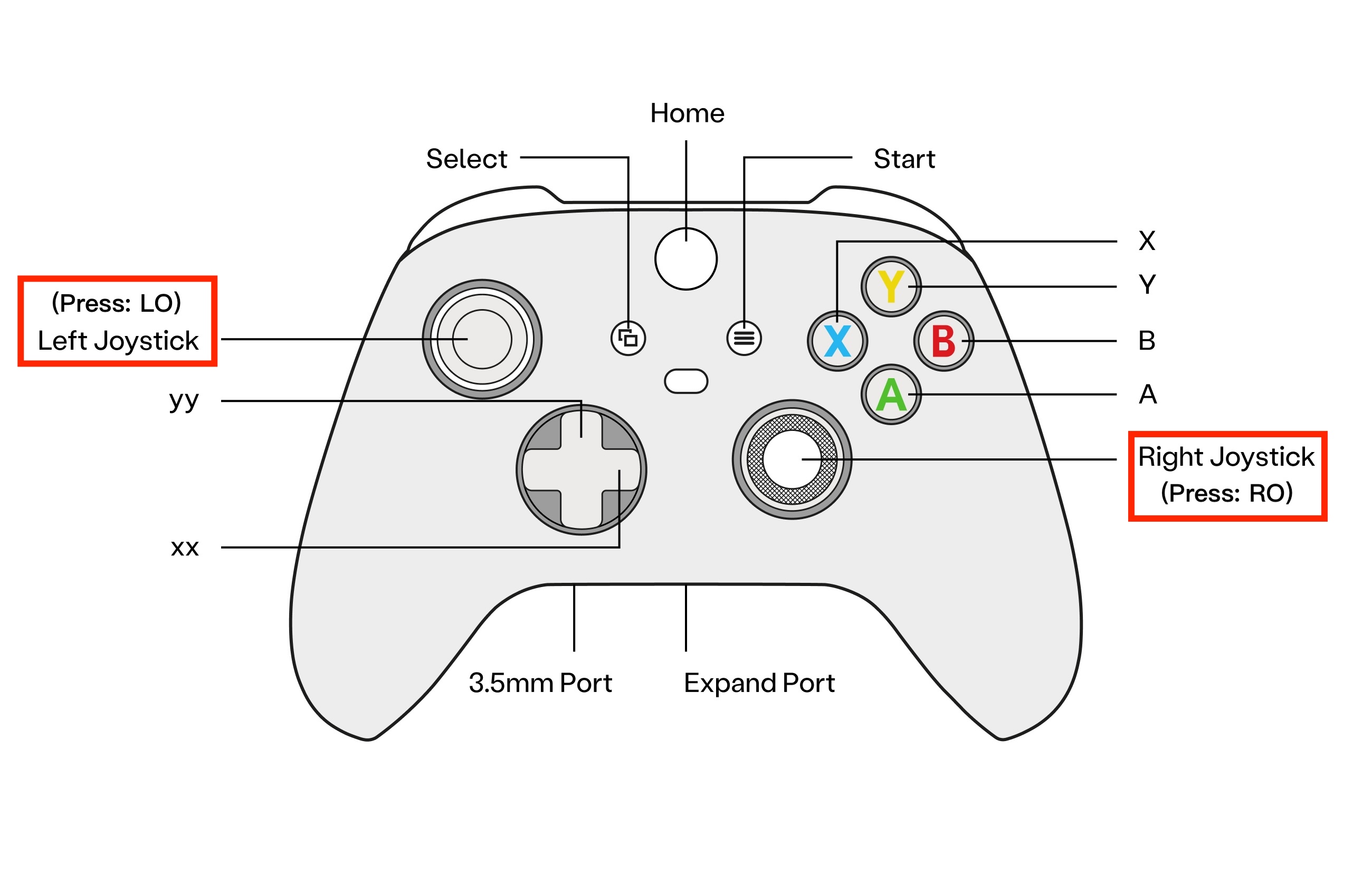
确保机器人悬挂并处于阻尼模式,短按遥控器组合键LO + RO(垂直下压摇杆)进入开发者模式。
RCU指示灯由紫色慢速呼吸变为蓝色慢速呼吸,表示进入开发者模式成功,此时可使用SDK进行开发调试。

运行控制示例
1. 启动程序
# 获取网卡名
ip a
# 运行控制示例(替换 enp59s0 为实际有线网卡名)
python deploy/deploy_real/deploy_real.py enp59s0 adam_lite_12dof.yaml
2. 预定姿态
启动程序后,机器人进入阻尼模式,按遥控器start键,机器人关节运动到默认位置,摆出预定姿态。
下降悬挂绳,使机器人双脚完全着地。

3. 运动控制
按遥控器 A 键,机器人原地踏步,待状态稳定后可逐渐降低悬挂绳,给机器人一定的活动空间。
此时可使用遥控器摇杆控制机器人的运动:
- 左摇杆的前后,控制机器人的x方向的运动速度。
- 左摇杆的左右,控制机器人的y方向的运动速度。
- 右摇杆的左右,控制机器人的偏航角yaw的运动速度。
4. 退出程序
按遥控器 B 键或在用户终端界面执行 Ctrl+C 退出程序。
退出开发者模式
短按遥控器组合键LT + B退出开发者模式,RCU指示灯由蓝色慢速呼吸变为紫色慢速呼吸,表示退出开发者模式成功,进入阻尼模式。