遥控说明
模式定义
| 概念 | 说明 |
|---|---|
| 阻尼模式 | 机器人所有关节停止主动运动,停留在当前位置,摆动时有明显阻尼感 |
| 零位模式 | 机器人所有关节运动到固定位置并锁定 |
| 动作模式 | 可执行预定动作、开启遥操或数据记录等功能 |
| 开发者模式 | 推荐由阻尼模式进入,用于SDK开发,该模式下可接收用户控制数据,实现自定义控制 |
RCU指示灯说明
RCU指示灯位于机器人正面胸口电池盖下方。
| 模式状态 | 颜色 |
|---|---|
| RCU启动成功,未连接NUC | 🟣 紫色快速呼吸 |
| RCU启动成功,已连接NUC | 🟣 紫色慢速呼吸 |
| 开发者模式 | 🔵 蓝色慢速呼吸 |
| 电量低 | 🔴 红色快速呼吸 |
| 电池未连接 | 🔴 红色慢速呼吸 |
| 零位检查异常 | 🟡 黄色常亮 |
| 执行器异常 | 🟡 黄色慢速呼吸 |
| 绝编异常 | 🟡 黄色快速呼吸 |
操作说明
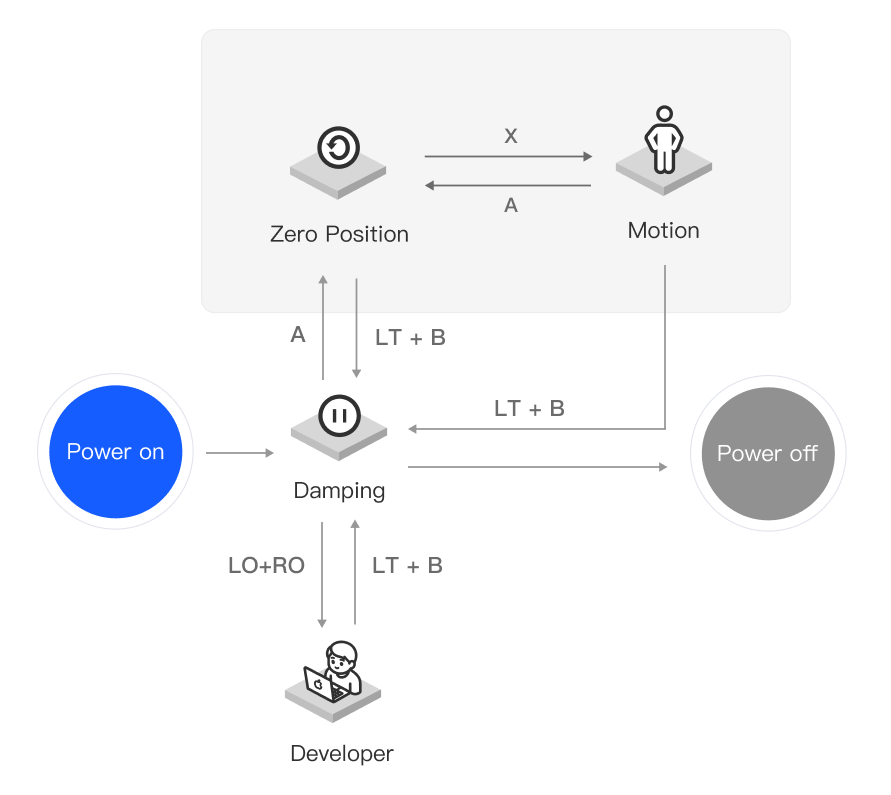
| 模式 | 按键 | 前序状态 | 功能描述 |
|---|---|---|---|
| 阻尼模式 | LT + B | 任意模式 | 在任何模式下都可触发,用于安全待机或停止动作 |
| 零位模式 | A | 阻尼/动作 | 进入零位模式,所有关节运动到固定位置并锁定 |
| 动作模式 | X | 零位 | 由零位模式进入动作模式,可执行预定动作、开启遥操或数据记录等功能 |
| RB | 动作 | 执行单个预设动作 | |
| RT + RB | 动作 | 连续执行多个预设动作 | |
| 十字键 → | 动作 | 开启遥操接收模式 | |
| 十字键 ← | 动作 | 退出遥操接收模式 | |
| LT + LB | 动作 | 触发数据记录开始/结束,记录全部关节 + 手指位置数据 - 记录地址: /etc/pndbotics/pnd_adam_dds/logs - 播放地址: /etc/pndbotics/pnd_adam_dds/resource/motion |
|
| 开发者模式 | LO + RO | 阻尼 | 由阻尼模式进入开发者模式,接收用户控制数据,实现自定义控制 |
| LT + B | 开发者 | 退出用户控制,切回阻尼模式 | |
| 执行器下电 | LB + RB | 任意模式 | 紧急情况可按下立即断电 |
| 执行器上电 | Y + B | 开机 | 用于手动启动以及紧急情况断电后的恢复上电 |
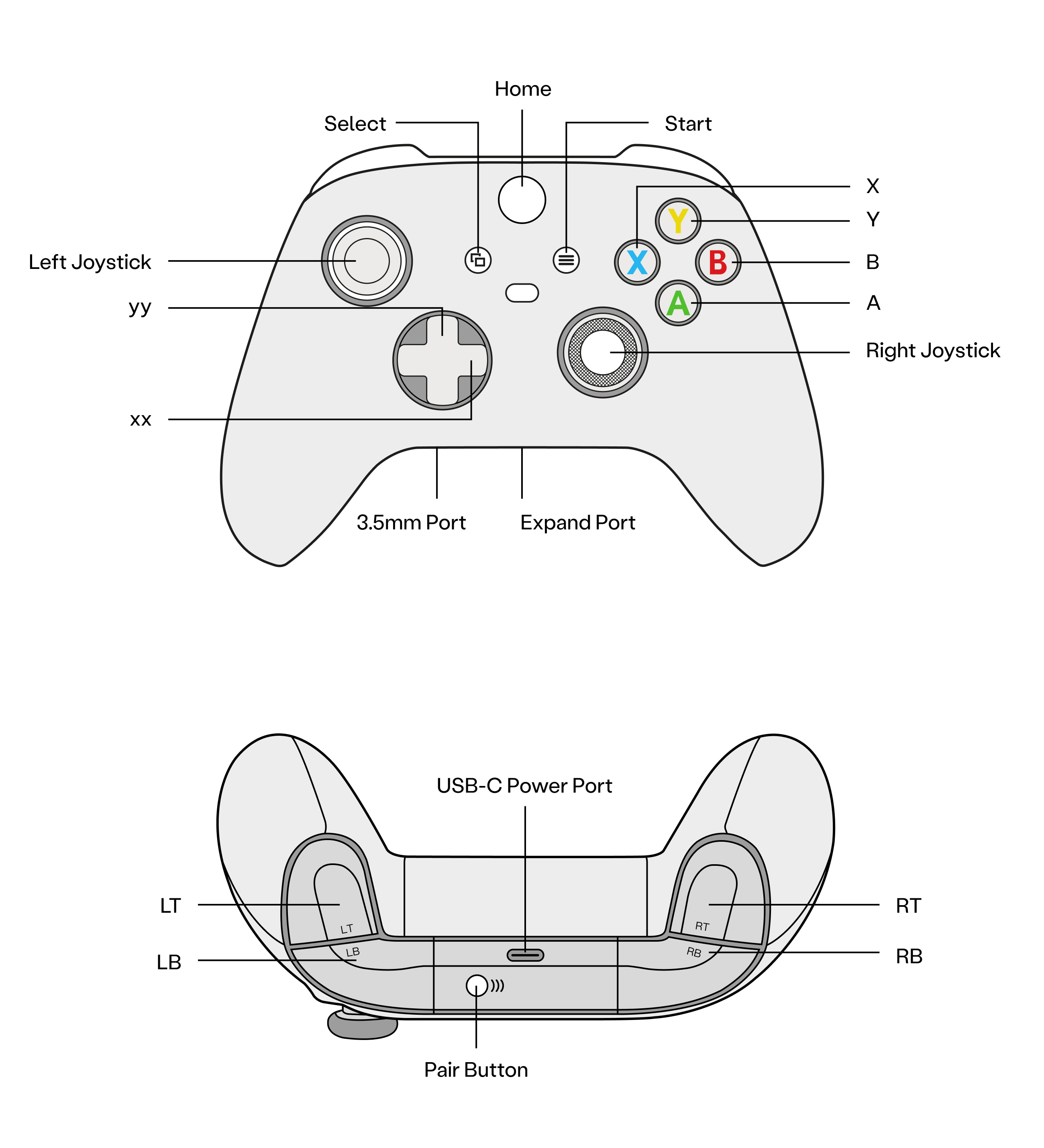
按键说明
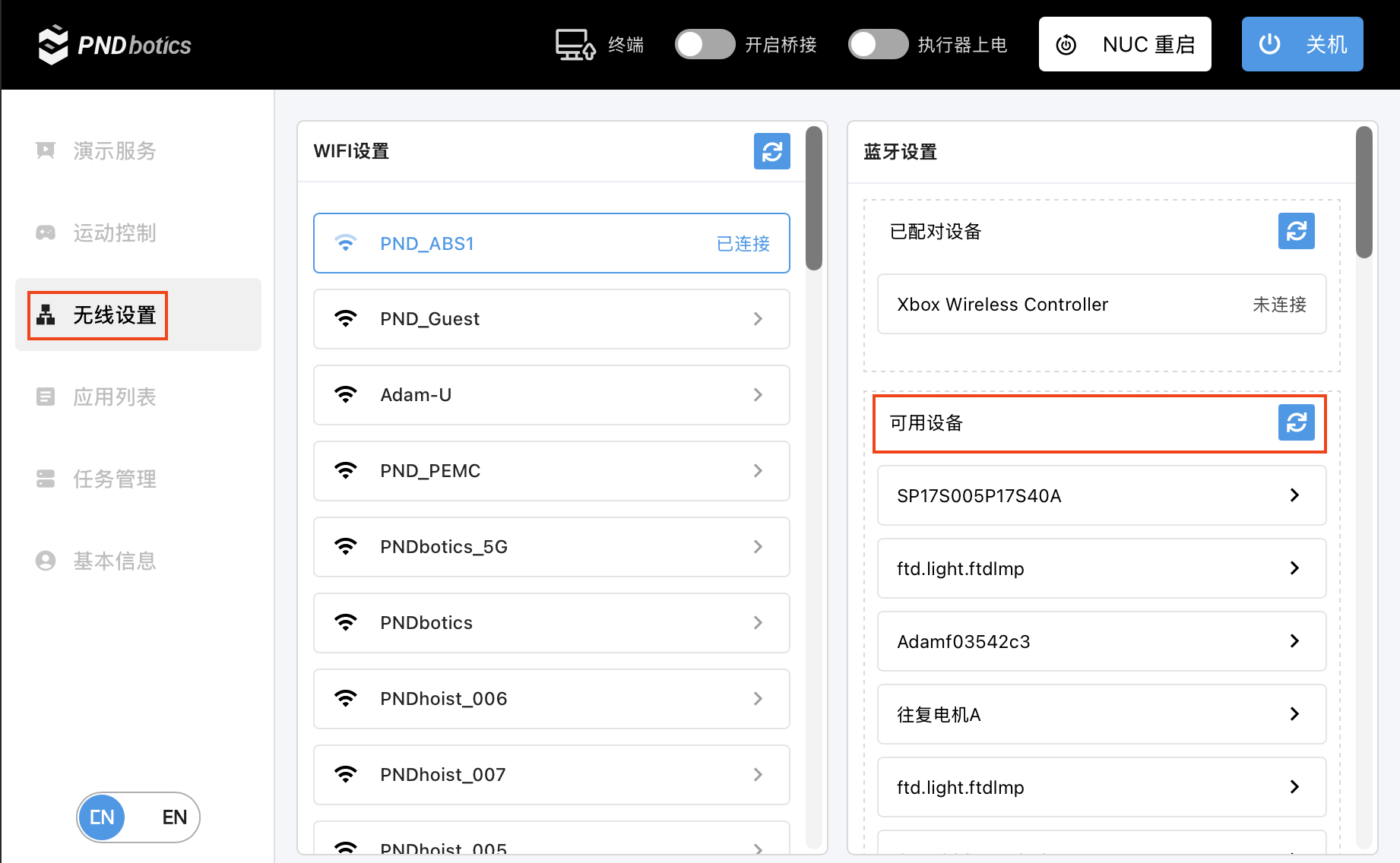
配对连接
出厂设置默认已配对,开机自动连接。若需更换手柄重新配对,参考以下步骤:
- 浏览器输入机器人IP:
192.168.XX.XX(手柄背面获取)进入PAC界面 - 长按手柄 配对键 至指示灯快速闪烁
- 点击“无线设置”,在“可用设备”一栏找到设备名称“Xbox Wireless Controller”,点击进行配对连接
最新修订日期: 2026-02-03