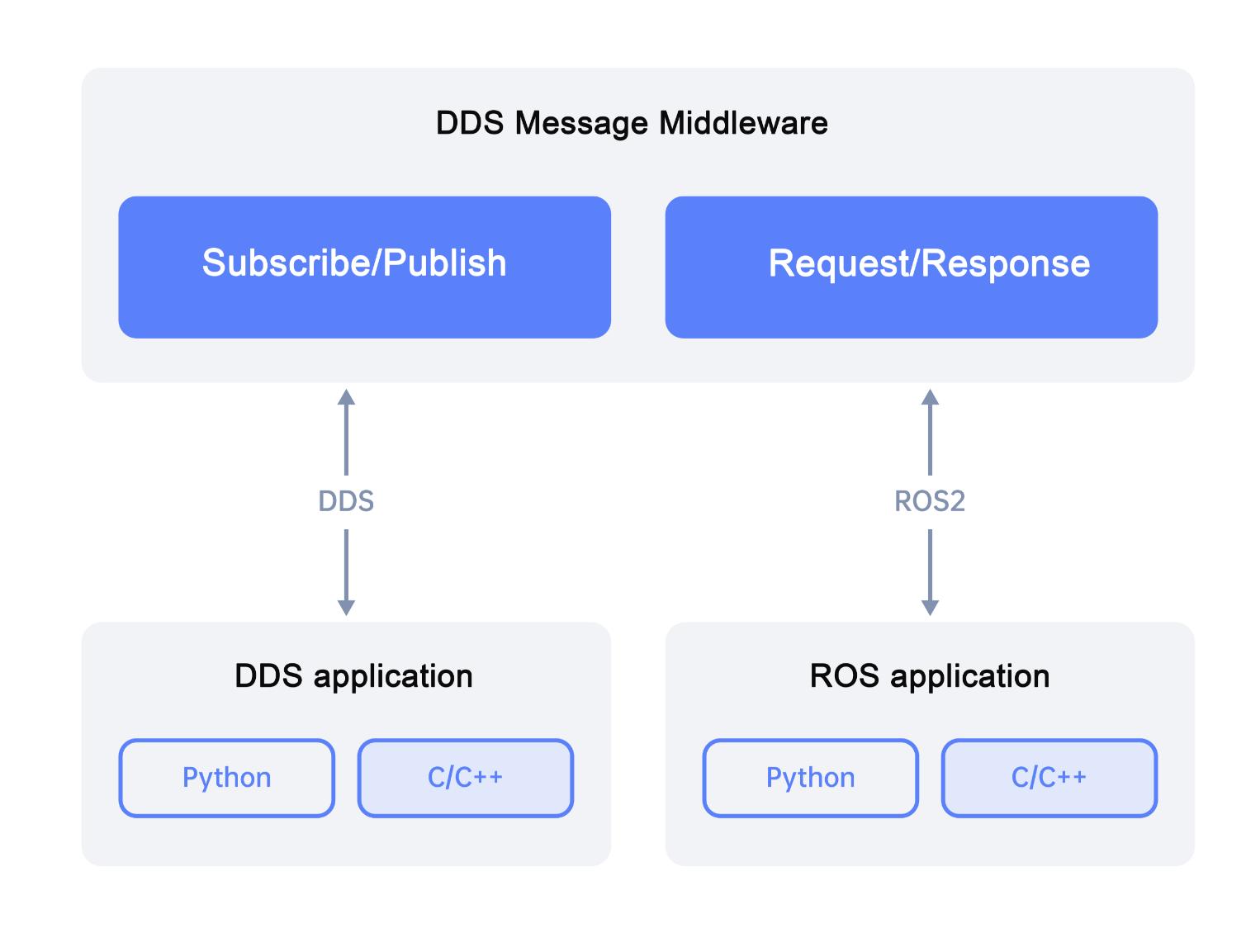
SDK概述 Adam-U 采用 DDS 作为消息中间件,主要的数据交互采用两种模式:订阅/发布和请求/响应。 订阅/发布: 接收方订阅某个消息,发送方根据订阅列表向接收方发送消息,主要用于中高频或持续的数据交互。 请求/响应: 问答模式,通过请求实现数据获取或操作。用于低频或功能切换时的数据交互。