快速开发(真机)
本文介绍了使用pnd_sdk_python对Adam进行快速开发。通过有线连接机器人与用户计算机,实现真机控制。
系统环境
推荐在 Ubuntu 22.04 x86_64 系统下进行开发,暂不支持 Mac、Windows。
安装 SDK
# 安装系统依赖
sudo apt install libyaml-cpp-dev libspdlog-dev libboost-all-dev libglfw3-dev python3-pip
# 安装 Python SDK
cd ~
git clone https://github.com/pndbotics/pnd_sdk_python.git
cd pnd_sdk_python && sudo pip3 install -e .
🔗 参考链接:pnd_sdk_python
真机连接
- 使用网线连接机器人与用户计算机,机器人网口位于背部
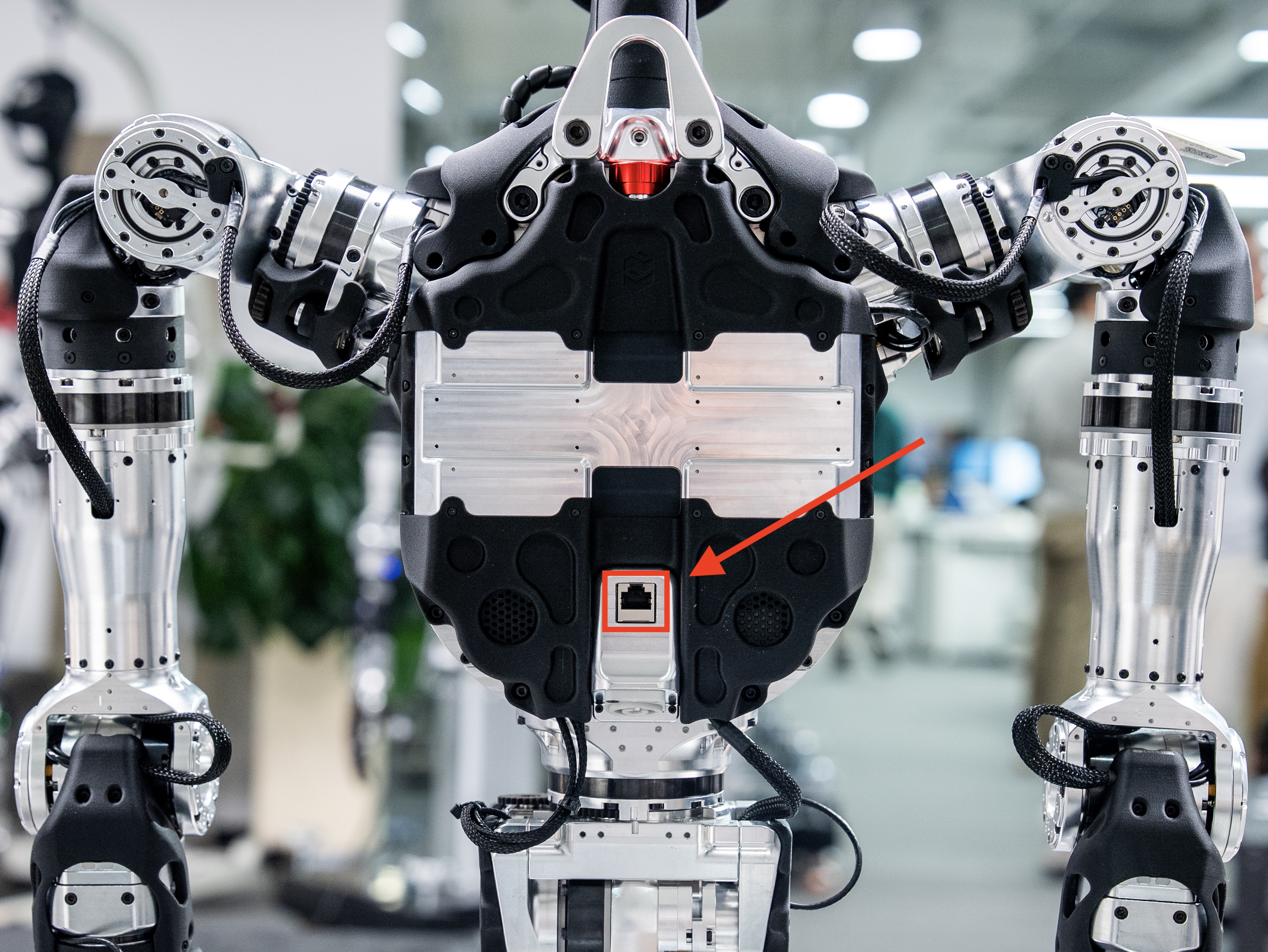
- 在用户计算机上设置网络与机器人同一网段,修改IP地址如:
10.10.20.XXX

开发者模式
确保机器人悬挂并处于阻尼模式,短按遥控器组合键LO + RO(垂直下压摇杆)进入开发者模式。
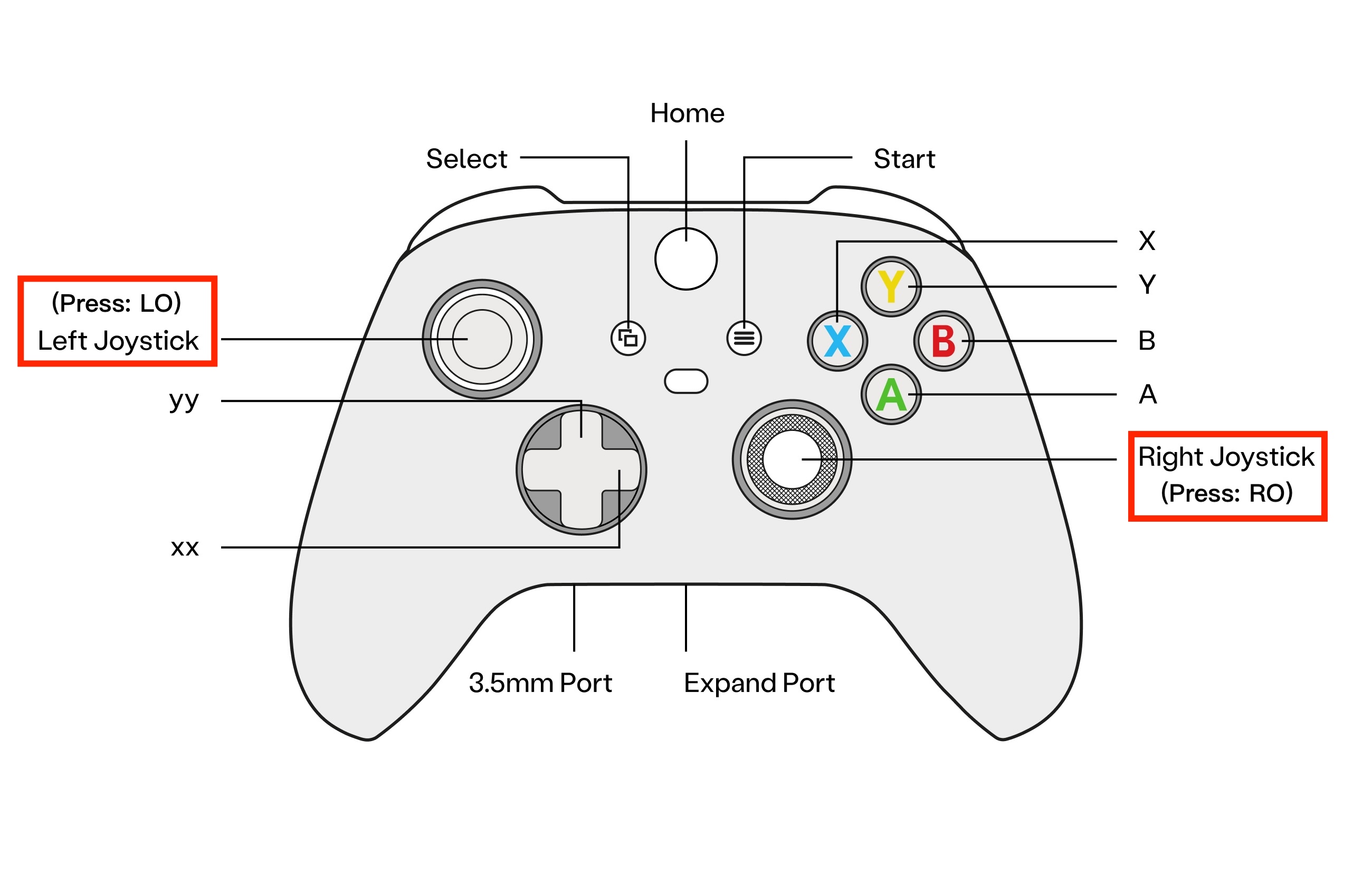
RCU指示灯由紫色慢速呼吸变为蓝色慢速呼吸,表示进入开发者模式成功,此时可使用SDK进行开发调试。

运行控制示例
该控制示例会使机器人脚踝运动,请确保机器人已正确悬挂且双脚距离地面 >10cm。
打开一个新的终端:
控制示例
退出开发者模式
短按遥控器组合键LT + B退出开发者模式,RCU指示灯由蓝色慢速呼吸变为紫色慢速呼吸,表示退出开发者模式成功,进入阻尼模式。