🤖 PND Adam 人形机器人
 Adam 是一款融合尖端硬件架构与智能算法平台的全身动力机器人,具备卓越的运动灵活性、环境感知能力与高精度动态控制性能。其仿生结构设计与类人形态运动能力,使其能够在非结构化环境中执行高复杂度任务,广泛应用于科研实验、工业自动化、医疗辅助及服务机器人等多个前沿领域。
Adam 是一款融合尖端硬件架构与智能算法平台的全身动力机器人,具备卓越的运动灵活性、环境感知能力与高精度动态控制性能。其仿生结构设计与类人形态运动能力,使其能够在非结构化环境中执行高复杂度任务,广泛应用于科研实验、工业自动化、医疗辅助及服务机器人等多个前沿领域。
💡 核心特性
🦾 机械系统架构
- 执行器系统:集成多达 41 个准直驱(Quasi-Direct Drive)柔性力控关节,实现高动态精度控制与多自由度灵巧运动。
- 模块化架构:采用全系统模块化执行器设计,优化生产与维护效率,适配规模化制造需求。
- 仿生髋关节设计:创新性仿生髋部结构,显著增强机器人在复杂操作任务中的运动拟人性与灵活性。
- 下肢关节系统:搭载 4 组高扭矩密度、多级减速比、高响应灵敏度的准直驱力控关节,提供卓越的步态性能与动态稳定性。
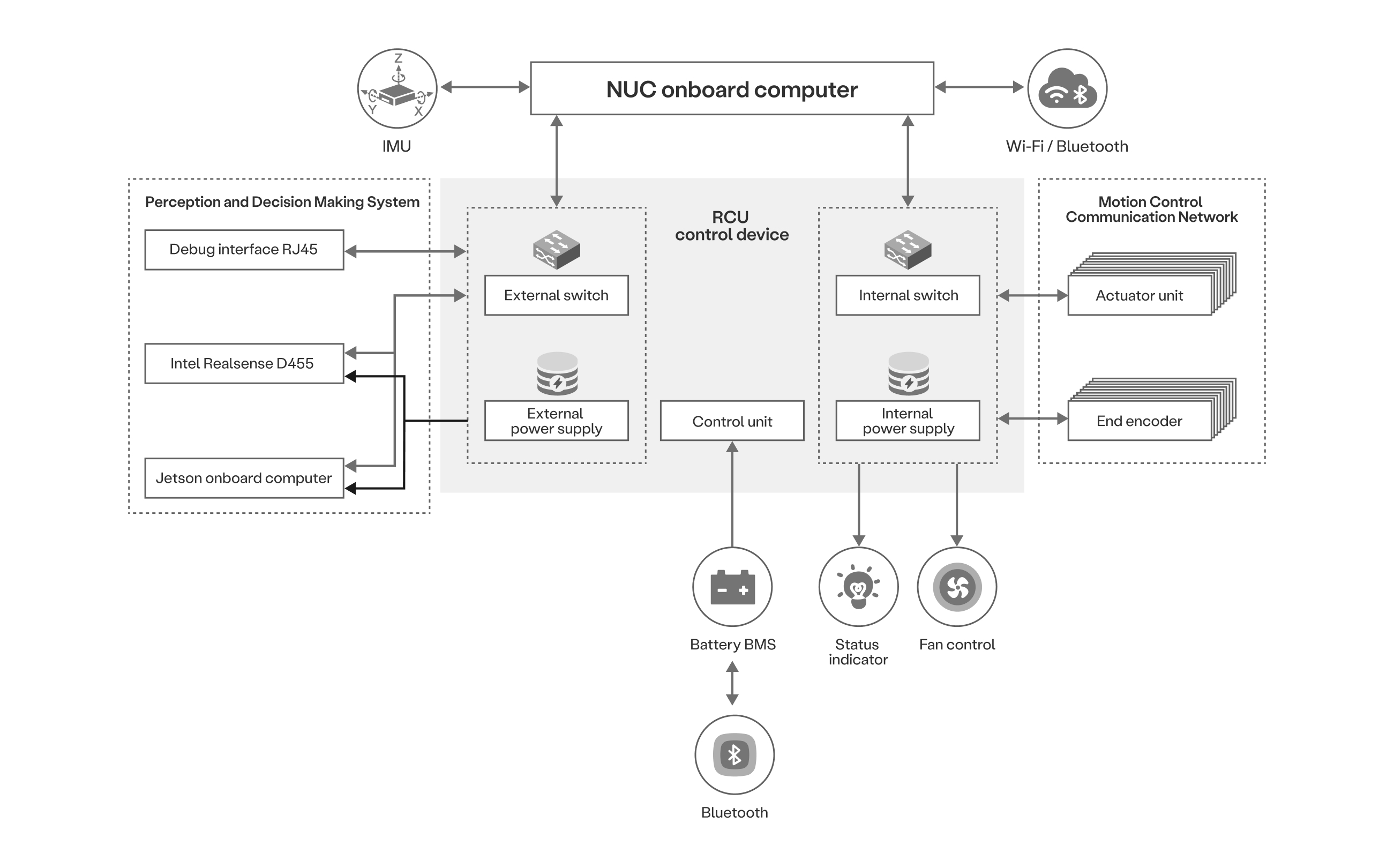
🧠 控制系统与通信架构
- PND-Network:专有高实时通信协议栈,支持激光雷达、视觉相机等多模态传感器的扩展接入,强化环境感知与闭环控制能力。
- 中央控制单元:搭载 Intel NUC12WSKi7 处理器及自研机器人控制单元(RCU),统筹机器人关节驱动、能源管理、通信调度与系统监控。
- AI 计算平台:Adam Standard/SP 集成 NVIDIA Jetson Orin NX 16GB 嵌入式模块,专用于高性能 AI 推理、视觉计算与实时决策任务。
- 感知系统:配备 Intel RealSense D455 深度视觉传感器,实现高精度三维环境建模与实时空间定位。
🌀 动态平衡与运动规划
- WBC + MPC 算法架构:基于全身动力学控制(Whole-Body Control, WBC)与模型预测控制(Model Predictive Control, MPC)的融合策略,保障机器人在动态扰动环境下的平衡鲁棒性与轨迹跟踪精度。
- 强化学习与模仿学习:依托大规模仿真环境与深度神经网络训练,结合强化学习与模仿学习策略,持续迭代优化运动策略与控制性能。
🔋 能源与续航管理
- 智能电池管理系统(BMS):集成高精度电量监控与动态功率分配机制,支持持续高强度任务运行。
- 系统能效优化:采用低功耗硬件设计与动态功耗管理策略,显著提升整机续航能力。
📡 通信与系统扩展
- 多模通信能力:兼容 5G、Wi-Fi 6、蓝牙 5.0 协议,实现高带宽、低时延的远程操控与实时调试。
- 传感器扩展接口:PND-Network 具备优异的接口扩展性,支持多源传感器融合与系统功能定制,赋能复杂场景下的感知与决策能力。
🌐 应用领域
- 科研与实验室场景:适用于高精度自动化实验、动态系统测试与数据采集分析等研究任务。
- 工业自动化产线:在精密装配、在线检测、柔性制造等环节实现高可靠性作业与流程优化。
- 医疗辅助与康复:提供手术协作、康复训练支持与病患监护等服务,适配多样化医疗场景。
- 服务与协作机器人:适用于物流分拣、接待导引、人机协作等智能服务应用,具备高度场景适应性。
📊 技术参数
| 型号 | Adam Lite | Adam Standard | Adam SP | Adam Pro |
|---|---|---|---|---|
| 全身尺寸 | 1.67m | 1.67m | 1.67m | 1.67m |
| 整机重量 | 60kg | 61kg | 62kg | 63kg |
| 全身自由度 | 25自由度 | 29自由度 | 41自由度 | 43自由度 |
| 单腿自由度 | 髋关节x3 + 膝关节x1 + 踝关节x2 = 6 | 髋关节x3 + 膝关节x1 + 踝关节x2 = 6 | 髋关节x3 + 膝关节x1 + 踝关节x2 = 6 | 髋关节x3 + 膝关节x1 + 踝关节x2 = 6 |
| 单手臂自由度 | 肩关节x3 + 肘关节x1 + 小臂关节x1 = 5 | 肩关节x3 + 肘关节x1 + 小臂关节x1 + 手腕关节x2 = 7 | 肩关节x3 + 肘关节x1 + 小臂关节x1 + 手腕关节x2 + 灵巧手指x6=13 | 肩关节x3 + 肘关节x1 + 小臂关节x1 + 手腕关节x2 + 灵巧手指x6=13 |
| 腰自由度 | 3自由度 | 3自由度 | 3自由度 | 3自由度 |
| 关节单元极限扭矩 | 膝关节约 340N·m,髋关节约 340N·m,踝关节约 46N·m,手臂关节约 60N·m | 膝关节约 340N·m,髋关节约 340N·m,踝关节约 46N·m,手臂关节约 60N·m | 膝关节约 340N·m,髋关节约 340N·m,踝关节约 46N·m,手臂节约 60N·m | 膝关节约 340N·m,髋关节约 340N·m,踝关节约 46N·m,手臂节约 60N·m |
| 行走速度 | 最大1.5m/s | 最大1.5m/s | 最大1.5m/s | 最大1.5m/s |
| 电池 | 电池容量1172W·h,最大电压46.2V,最大输出电流25A | 电池容量1172W·h,最大电压46.2V,最大输出电流25A | 电池容量1172W·h,最大电压46.2V,最大输出电流25A | 电池容量1172W·h,最大电压46.2V,最大输出电流25A |
| 通信连接 | Wi-Fi 6,蓝牙5.0,易于远程实时控制和调试 | Wi-Fi 6,蓝牙5.0,易于远程实时控制和调试 | Wi-Fi 6,蓝牙5.0,易于远程实时控制和调试 | Wi-Fi 6,蓝牙5.0,易于远程实时控制和调试 |
| 控制和感知算力 | 高鲁棒性自研WBC(全身动力学控制)+MPC(模型预测)控制算法,机器人动态平衡 | 高鲁棒性自研WBC(全身动力学控制)+MPC(模型预测)控制算法,机器人动态平衡 | 高鲁棒性自研WBC(全身动力学控制)+MPC(模型预测)控制算法,机器人动态平衡 | 高鲁棒性自研WBC(全身动力学控制)+MPC(模型预测)控制算法,机器人动态平衡 |
| 主控制系统 | NUC12WSKi7,用于机器人运动控制 | NUC12WSKi7,用于机器人运动控制 | NUC12WSKi7,用于机器人运动控制 | NUC12WSKi7,用于机器人运动控制 |
| AI运算系统 | / | NVIDIA Jetson Orin NX 16GB嵌入式电脑,用于AI计算,视觉处理,上层决策 | NVIDIA Jetson Orin NX 16GB嵌入式电脑,用于AI计算,视觉处理,上层决策 | NVIDIA Jetson Orin NX 16GB嵌入式电脑,用于AI计算,视觉处理,上层决策 |
| 感知传感器配置 | / | Intel Realsense D455深度相机 | Intel Realsense D455深度相机 | ZED MINI |
| 头 | / | ✓ | ✓ | 2自由度 |
| 手 | 球形手 | / | 灵巧手 | 灵巧手 |
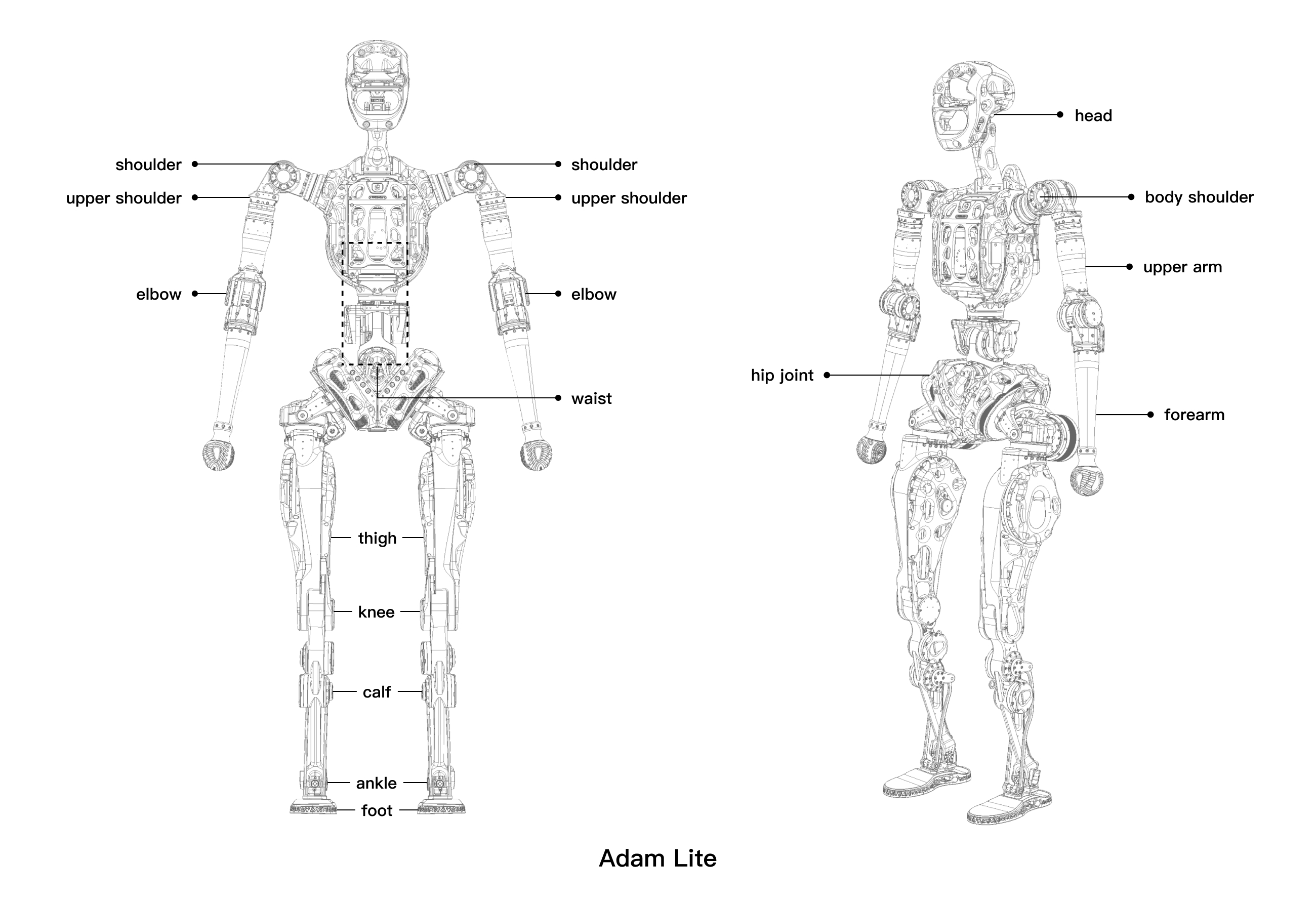
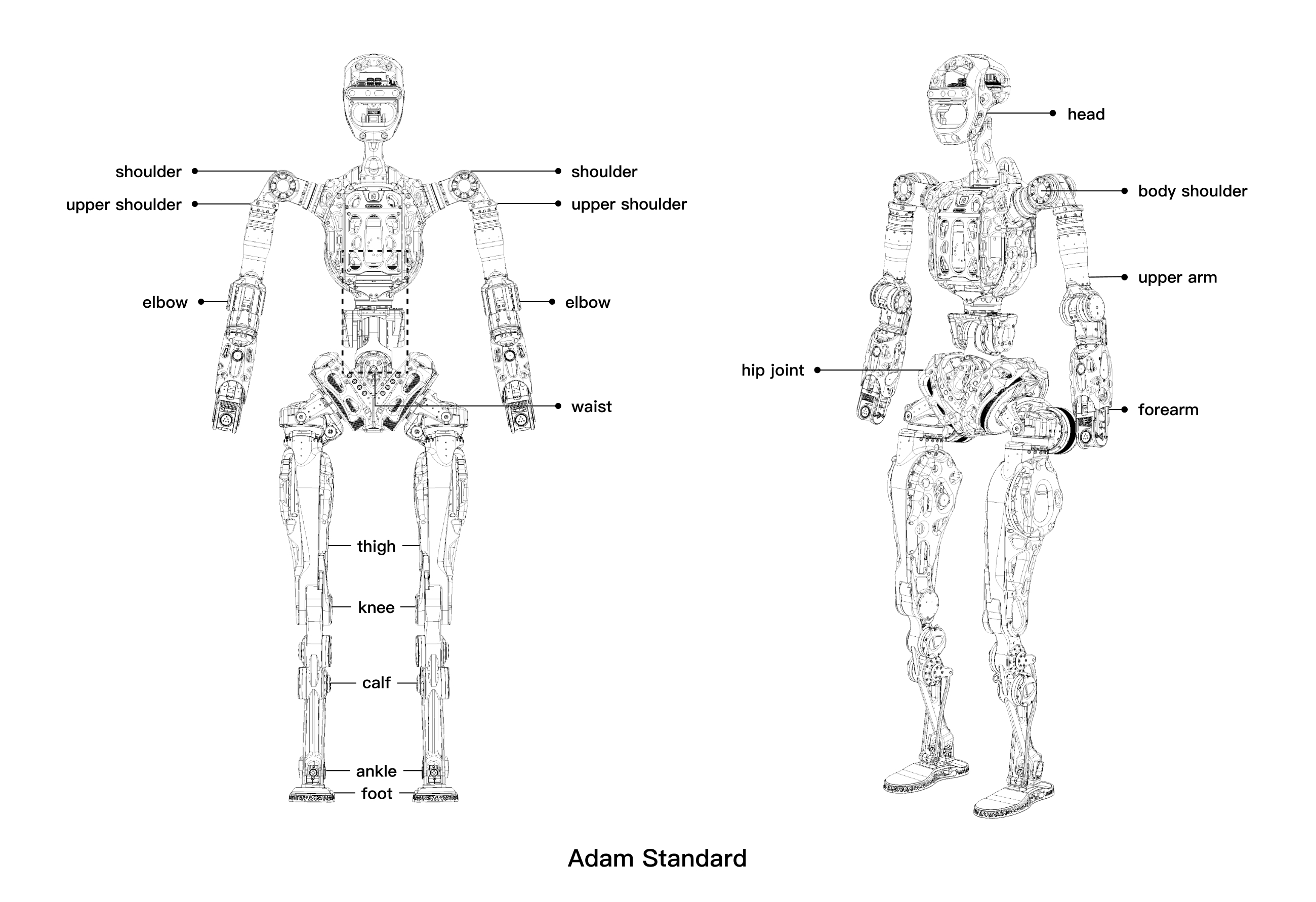
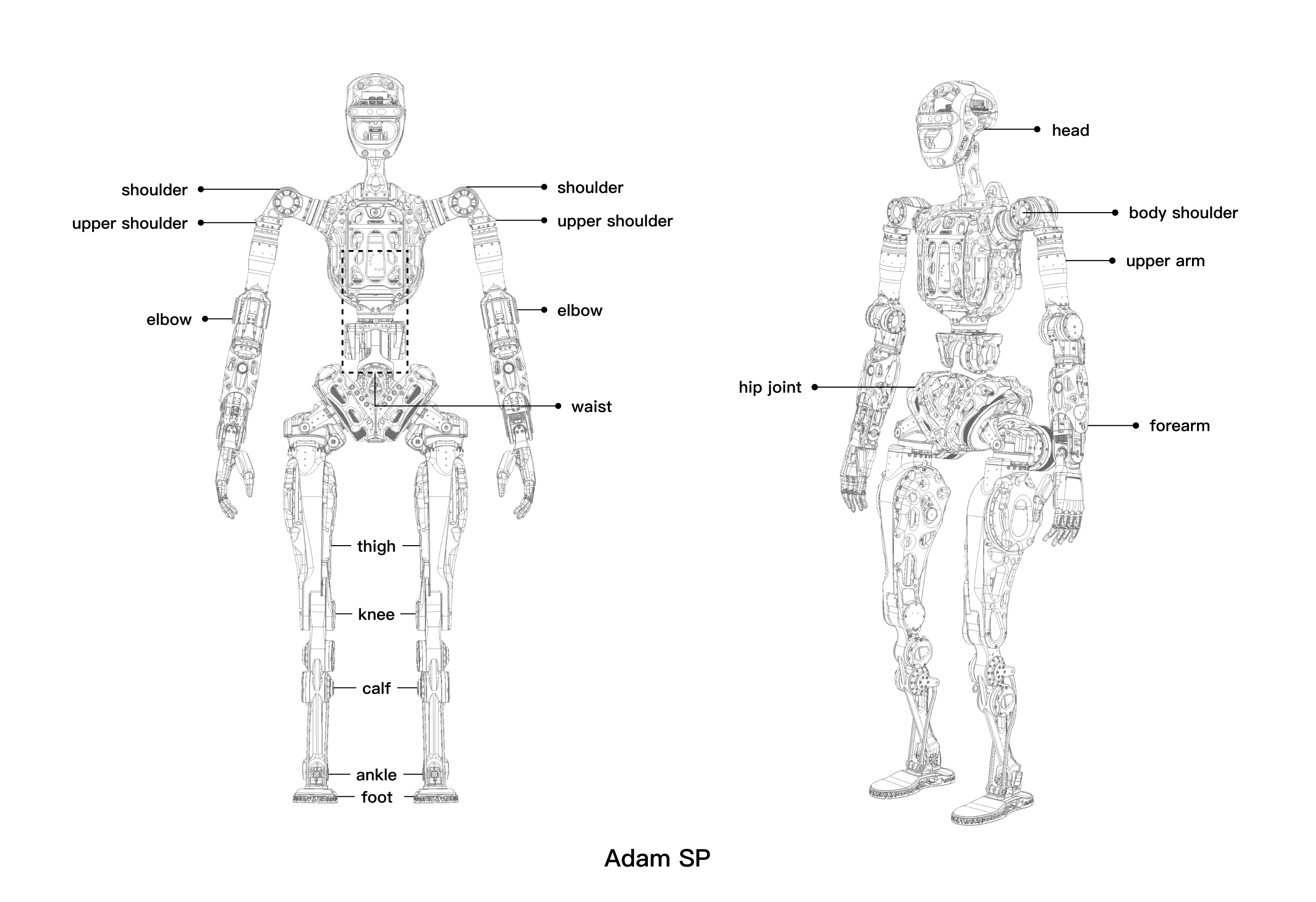
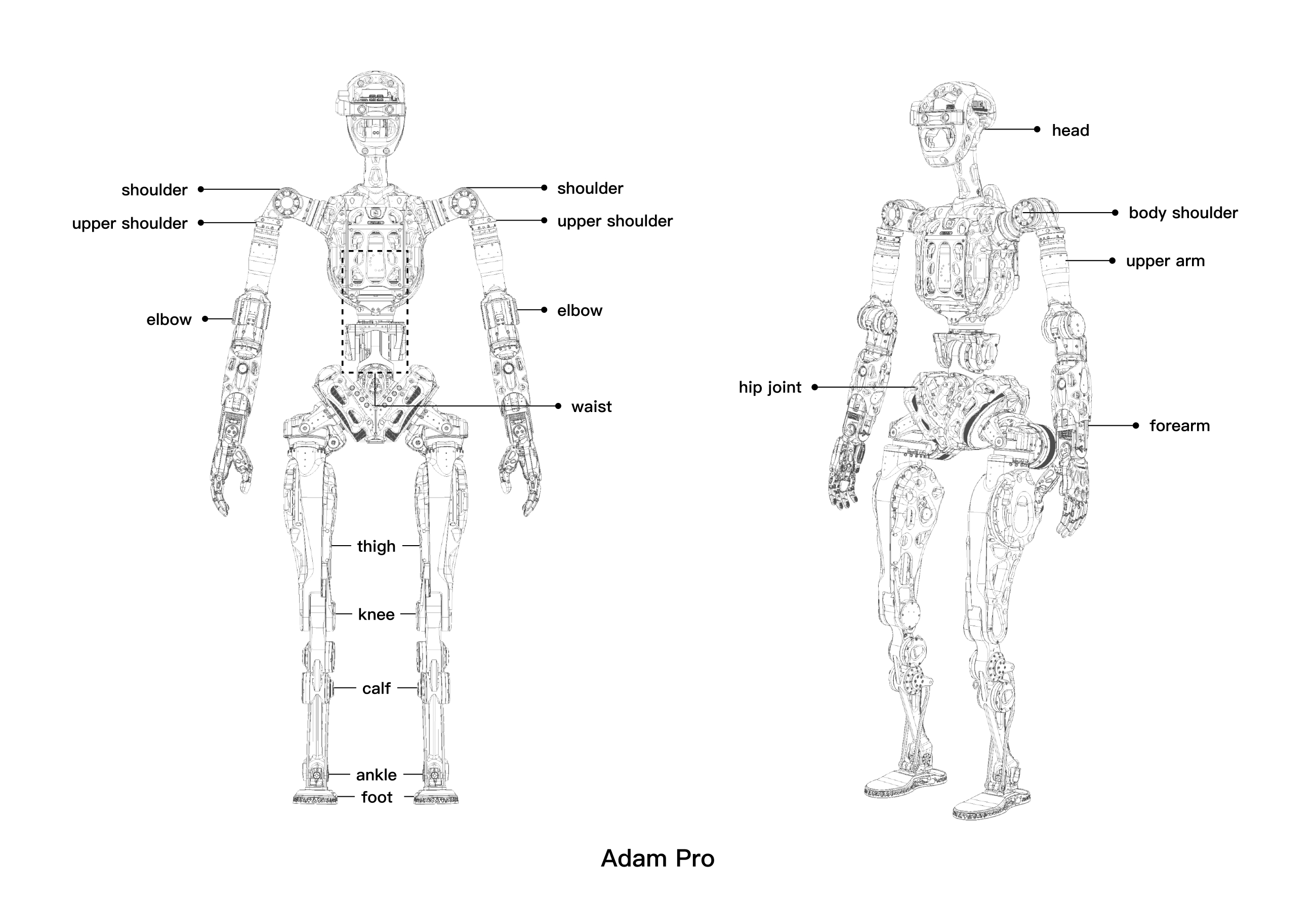
🧍♂️ 外观介绍
🧩 主要部件
⚙️ 硬件架构
🧠 控制计算模块
🧮 运动控制单元(小脑)
| 参数 | 规格 |
|---|---|
| 型号 | NUC12WSKi7 |
| CPU | 12th Gen Inter Core i7-1260P |
| 内核数 | 12核 |
| 线程数 | 16线程 |
| 最大睿频频率 | 4.7GHz |
| 内存 | 16G |
| 内存类型 | DDR4 3200M Hz |
| 缓存 | 18MB |
| 存储 | 128G |
| GPU | Intel® Iris® Xe Graphics |
| 显卡最大动态频率 | 1.40 GHz |
| 英特尔®深度学习提升 | 是 |
| 英特尔®Adaptix™ 技术 | 是 |
| 英特尔®超线程技术 | 是 |
| 指令集 | 64bit |
🧬 感知决策单元(大脑)
| 参数 | 规格 |
|---|---|
| 型号 | NVIDIA Jetson Orin NX 16GB |
| AI性能 | 100 TOPS |
| GPU | 搭载32个 Tensor Core的1024核NVIDIA Ampere架构GPU |
| CPU | 8核Arm CortexA78AE v8.2 64位CPU 2MB L2+4MB L3 |
| 显存 | 16GB 128位 LPDDR5 102.4GB/s |
| 存储 | 128G M.2 SSD 固态硬盘 |
| 视频编码 | 1x 4K60(H.265) 3x4K30(H.265) 6x 1080p60(H.265) 12x 1080p30(H.265) |
| 视频解码 | 1x8K30(H.265) 2x4K60(H.265) 4x4K30(H.265) 9x 1080p60(H.265) 18x 1080p30(H.265) |
| 摄像头 | 2x MIPICSI-2 D-PHY通道 |
| USB | 4x USB 3.2 接口 1x USB Type-C接口 |
| 显示接口 | 1x DisplayPort |
| 网络 | 千兆以太网 |
| 其他I/O | 40 针接头(UART、SPI、I2S、I2C、PWM、GPIO) 4 针风扇接头,直流电源插座 |
| 规格尺寸 | 103x90x34 (mm) |
🔩 关节参数
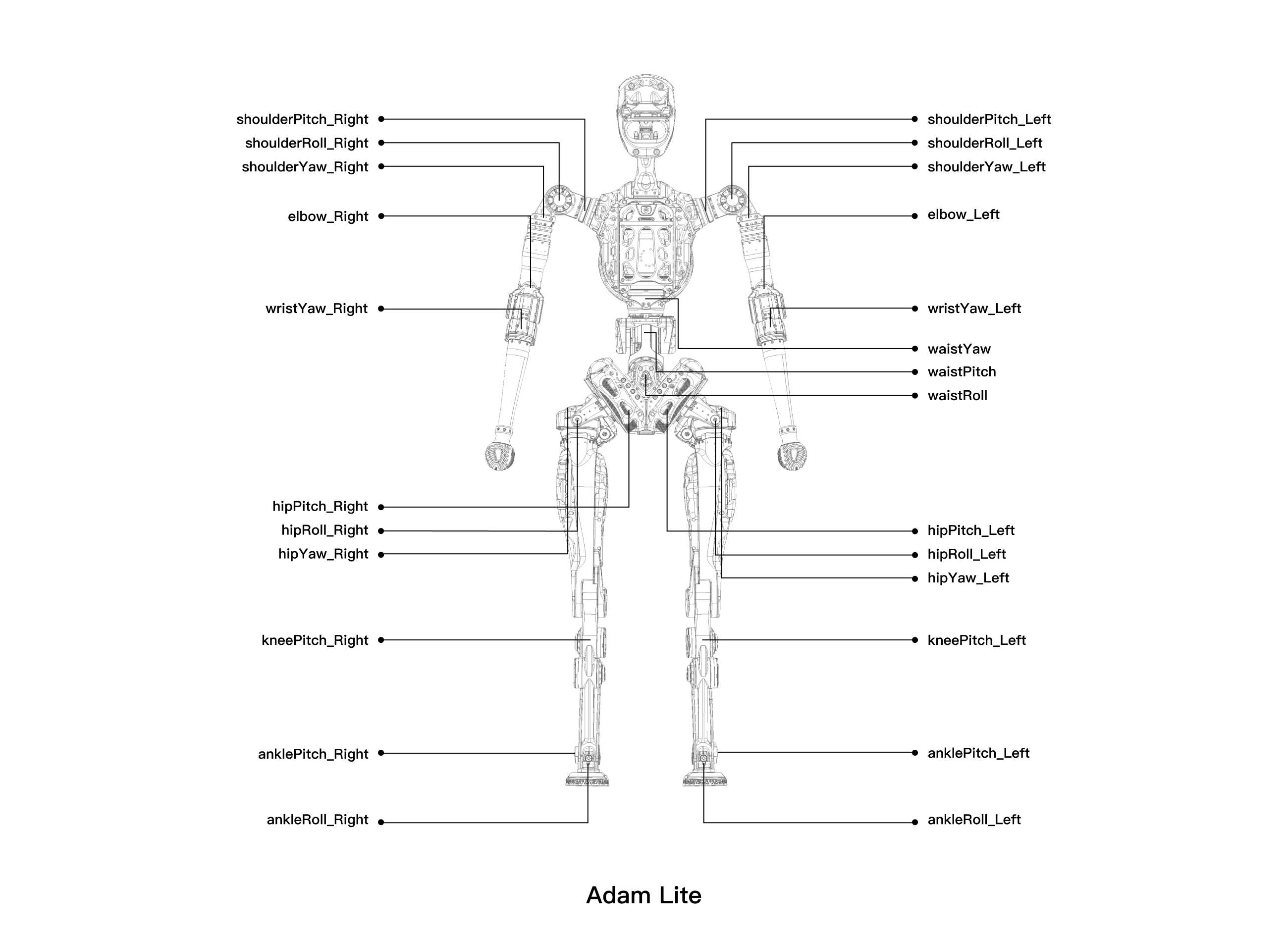
🤖 Adam Lite
| 关节名称 | 执行器型号 | 限位(rad) | 备注 |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420~-3.6138 | 向后为正,向前为负 |
| shoulderRoll_Left/Right | PND-50-14A-50-S | 左:+3.1416~-0.6283 右:+0.6283~-3.1416 |
左:向外为正,向内为负 右:向内为正,向外为负 |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094~-2.4958 | 向后为正,向前为负 |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | |
| waistRoll | PND-60-17-50-S | ±0.2793 | |
| waistPitch | PND-60-17-50-S | +1.3614~-0.8378 | 向前为正,向后为负 |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hipPitch_Left/Right | PND-130A-7F-7-P | ±2.2276 | |
| hipRoll_Left/Right | PND-80-20-50-S | +1.6581~-0.7854 | 向外为正,向内为负 |
| hipYaw_Left/Right | PND-60-17-30-S | ±0.8290 | |
| kneePitch_Left/Right | PND-130-7F-P | +2.4435~0.0000 | |
| anklePitch_Left/Right | PND-50-6F5S-P | +0.4276~-1.0472 | 两关节联动,勾脚为负,反向为正 |
| ankleRoll_Left/Right | PND-50-6F5S-P | ±0.4887 | 两关节联动 |
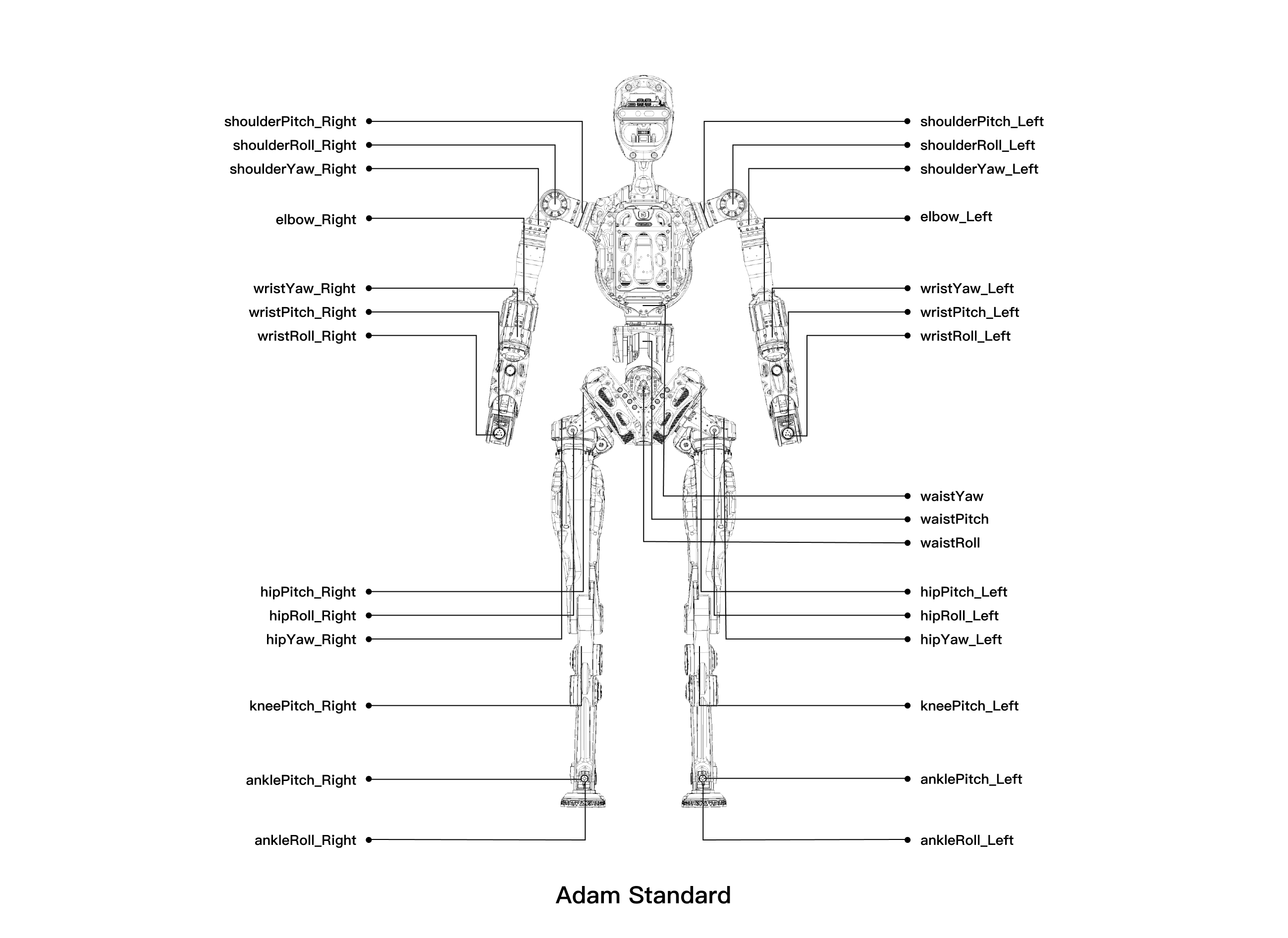
🤖 Adam Standard
| 关节名称 | 执行器型号 | 限位(rad) | 备注 |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420~-3.6138 | 向后为正,向前为负 |
| shoulderRoll_Left/Right | PND-50-14A-50-S | 左:+2.7925~-0.6283 右:+0.6283~-2.7925 |
左:向外为正,向内为负 右:向内为正,向外为负 |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094~-2.4958 | 向后为正,向前为负 |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | |
| wristPitch_Left/Right | PND-20-08-50-S | ±0.9599 | 两关节联动,球关节活动范围 |
| wristRoll_Left/Right | PND-20-08-50-S | ±0.9599 | 两关节联动,球关节活动范围 |
| waistRoll | PND-60-17-50-S | ±0.2793 | |
| waistPitch | PND-60-17-50-S | +1.3614~-0.8378 | 向前为正,向后为负 |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hipPitch_Left/Right | PND-130A-7F-7-P | ±2.2276 | |
| hipRoll_Left/Right | PND-80-20-50-S | +1.6581~-0.7854 | 向外为正,向内为负 |
| hipYaw_Left/Right | PND-60-17-30-S | ±0.8290 | |
| kneePitch_Left/Right | PND-130-7F-P | +2.4435~0.0000 | |
| anklePitch_Left/Right | PND-50-6F5S-P | +0.4276~-1.0472 | 两关节联动,勾脚为负,反向为正 |
| ankleRoll_Left/Right | PND-50-6F5S-P | ±0.4887 | 两关节联动 |
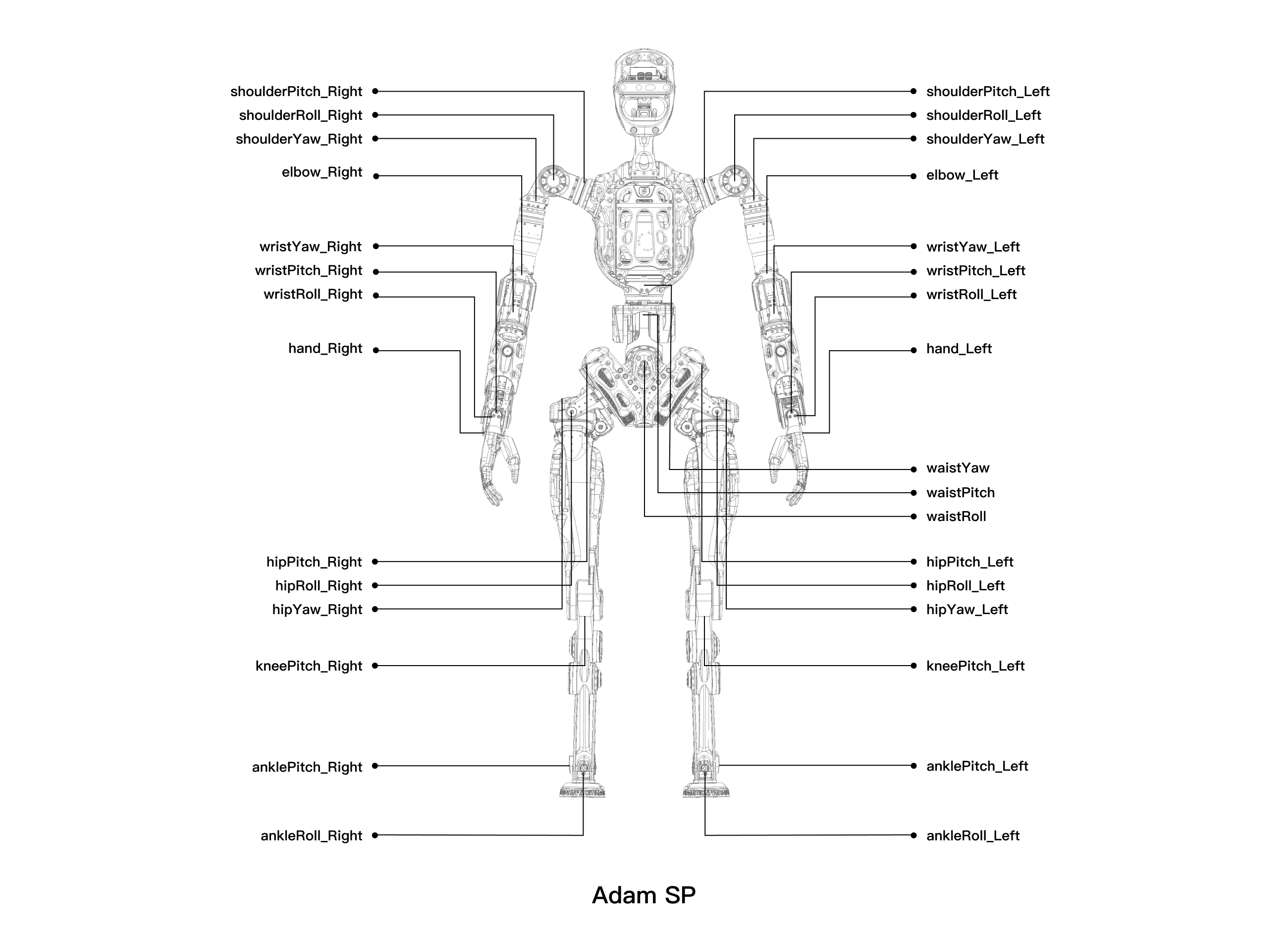
🤖 Adam SP
| 关节名称 | 执行器型号 | 限位(rad) | 备注 |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420~-3.6138 | 向后为正,向前为负 |
| shoulderRoll_Left/Right | PND-50-14A-50-S | 左:+2.7925~-0.6283 右:+0.6283~-2.7925 |
左:向外为正,向内为负 右:向内为正,向外为负 |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094~-2.4958 | 向后为正,向前为负 |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | |
| wristPitch_Left/Right | PND-20-08-50-S | ±0.9599 | 两关节联动,球关节活动范围 |
| wristRoll_Left/Right | PND-20-08-50-S | ±0.9599 | 两关节联动,球关节活动范围 |
| waistRoll | PND-60-17-50-S | ±0.2793 | |
| waistPitch | PND-60-17-50-S | +1.3614~-0.8378 | 向前为正,向后为负 |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hipPitch_Left/Right | PND-130A-7F-7-P | ±2.2276 | |
| hipRoll_Left/Right | PND-80-20-50-S | +1.6581~-0.7854 | 向外为正,向内为负 |
| hipYaw_Left/Right | PND-60-17-30-S | ±0.8290 | |
| kneePitch_Left/Right | PND-130-7F-P | +2.4435~0.0000 | |
| anklePitch_Left/Right | PND-50-6F5S-P | +0.4276~-1.0472 | 两关节联动,勾脚为负,反向为正 |
| ankleRoll_Left/Right | PND-50-6F5S-P | ±0.4887 | 两关节联动 |
| hand_Left/Right | / | / | 灵巧手关节 |
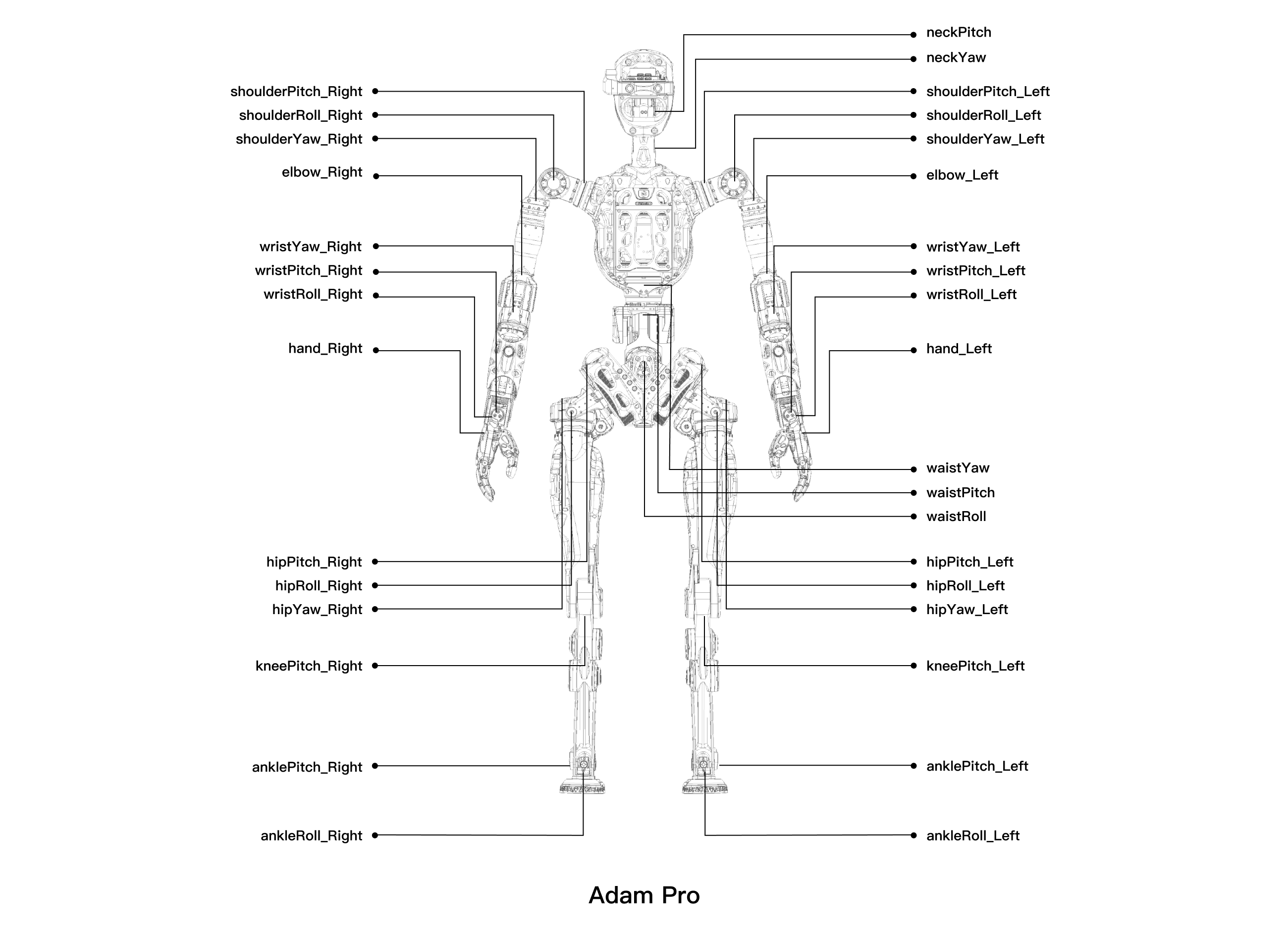
🤖 Adam Pro
| 关节名称 | 执行器型号 | 限位(rad) | 备注 |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420~-3.6138 | 向后为正,向前为负 |
| shoulderRoll_Left/Right | PND-50-14A-50-S | 左:+2.7925~-0.6283 右:+0.6283~-2.7925 |
左:向外为正,向内为负 右:向内为正,向外为负 |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094~-2.4958 | 向后为正,向前为负 |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | |
| wristPitch_Left/Right | PND-20-08-50-S | ±0.9599 | 两关节联动,球关节活动范围 |
| wristRoll_Left/Right | PND-20-08-50-S | ±0.9599 | 两关节联动,球关节活动范围 |
| waistRoll | PND-60-17-50-S | ±0.2793 | |
| waistPitch | PND-60-17-50-S | +1.3614~-0.8378 | 向前为正,向后为负 |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hipPitch_Left/Right | PND-130A-7F-7-P | ±2.2276 | |
| hipRoll_Left/Right | PND-80-20-50-S | +1.6581~-0.7854 | 向外为正,向内为负 |
| hipYaw_Left/Right | PND-60-17-30-S | ±0.8290 | |
| kneePitch_Left/Right | PND-130-7F-P | +2.4435~0.0000 | |
| anklePitch_Left/Right | PND-50-6F5S-P | +0.4276~-1.0472 | 两关节联动,勾脚为负,反向为正 |
| ankleRoll_Left/Right | PND-50-6F5S-P | ±0.4887 | 两关节联动 |
| hand_Left/Right | / | / | 灵巧手关节 |
| neckYaw | PND-60-17-50-S | ±1.0472 | 颈部偏航关节 |
| neckPitch | PND-60-17-50-S | ±1.0472 | 颈部俯仰关节 |
✋ PND Dexterous Hand
| 关节名称 | 限位(rad) | 备注 |
|---|---|---|
| Thumb1_Left/Right | 0.0873~1.5708 | 内收/外展 |
| Thumb2_Left/Right | 0.4538~1.0821 | 屈伸 |
| Index_Left/Right | 0~1.5533 | 屈伸 |
| Middle_Left/Right | 0~1.5533 | 屈伸 |
| Ring_Left/Right | 0~1.5533 | 屈伸 |
| Pinky_Left/Right | 0~1.5533 | 屈伸 |
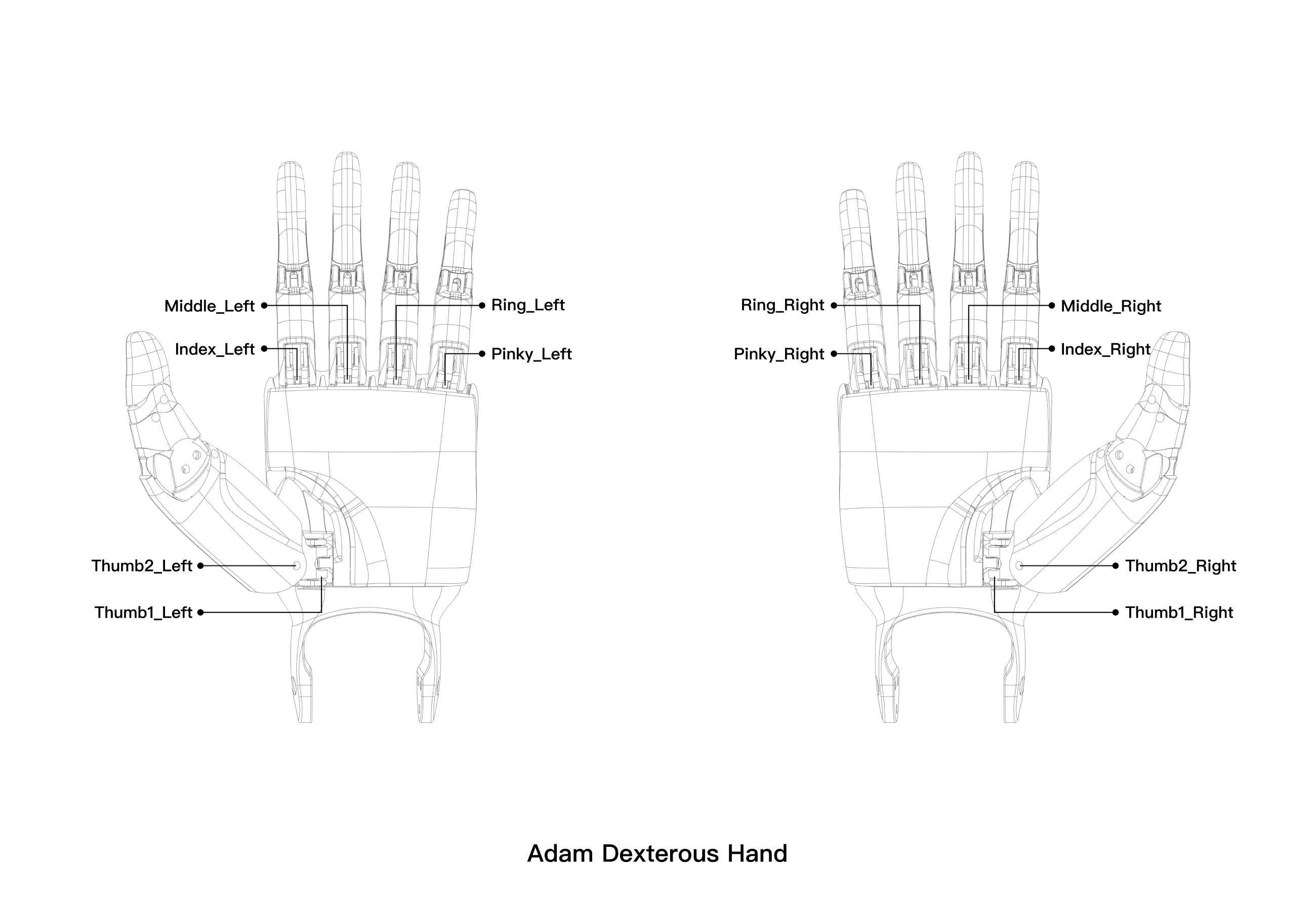
PND Dexterous Hand 的各手指关节采用 线性控制映射:
-
控制量为 0 时,对应关节处于张开最大角度位置(即角度下限)。
-
控制量为 1000 时,对应关节处于闭合最大角度位置(即角度上限)。
最新修订日期: 2025-12-03