Remote Control
Mode Definitions
| Concept | Description |
|---|---|
| Damping Mode | All joints stop active motion and remain at their current positions. There is noticeable damping when joints are moved. |
| Zero Position Mode | All joints move to predefined fixed positions and lock. |
| Standing Mode | The robot enters a standing state. Roll, pitch, yaw, and body height can be controlled. Predefined actions can be executed, and teleoperation or data recording can be enabled. |
| Walking Mode | The robot enters walking state. Walking speed and rotation speed can be controlled. |
| Running Mode | The robot enters running state. Running speed and rotation speed can be controlled. |
| Developer Mode | Recommended to enter from Damping Mode. Used for SDK development. In this mode, the robot receives user control data for custom control. |
RCU Indicator Instructions
The RCU indicator is located below the battery cover on the front of the robot's chest.
| Status | Color |
|---|---|
| RCU startup successful, Not connected to NUC | 🟣 Purple, fast breathing |
| RCU startup successful, Connected to NUC | 🟣 Purple, slow breathing |
| Developer mode | 🔵 Blue, slow breathing |
| Low battery | 🔴 Red, fast breathing |
| Battery not connected | 🔴 Red, slow breathing |
| Zero position check abnormal | 🟡 Yellow, steady on |
| Actuator abnormal | 🟡 Yellow, slow breathing |
| Absolute encoder abnormal | 🟡 Yellow, fast breathing |
Operation Instructions
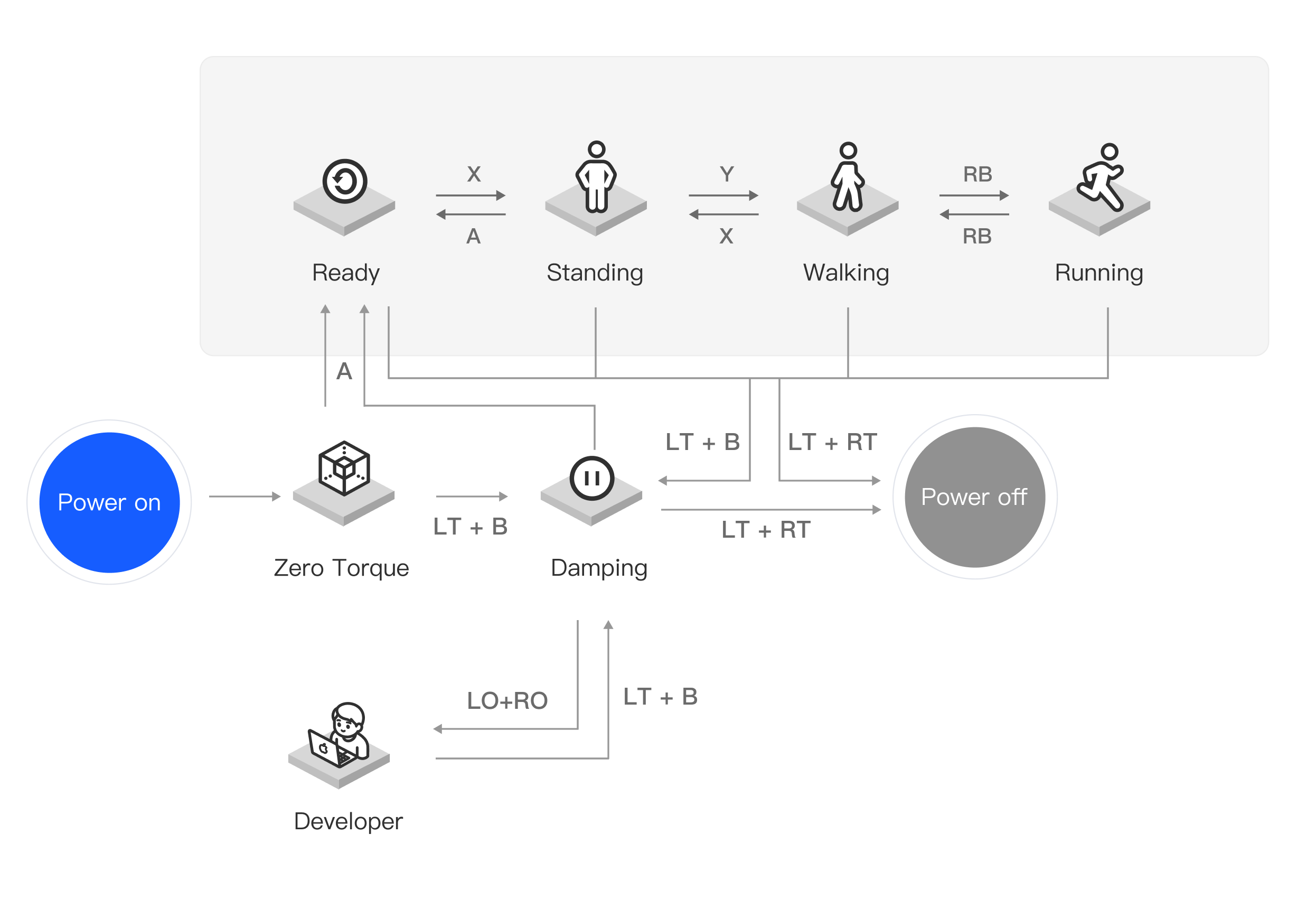
| Mode | Button | Previous State | Description |
|---|---|---|---|
| Damping Mode | LT + B | Any Mode | Can be entered from any mode. Used for safe stop or entering Developer Mode |
| Zero Position Mode | A | Damping / Standing | Enter Zero Position Mode, all joints move to fixed positions and lock |
| Standing Mode | X | Zero Position / Walking | Enter Standing Mode, predefined actions, teleoperation, and data recording are available |
| RB | Standing | Execute a single predefined action | |
| Left Joystick (Horizontal) | Standing | Control body roll | |
| Left Joystick (Vertical) | Standing | Control body pitch | |
| Right Joystick (Horizontal) | Standing | Control body yaw | |
| Right Joystick (Vertical) | Standing | Control body height | |
| D-pad → | Standing | Enable teleoperation receiving mode | |
| D-pad ← | Standing | Exit teleoperation receiving mode | |
| RT + D-pad ↓ | Standing | Start / stop data recording. Record all joint + finger position data - Record path: /etc/pndbotics/pnd_adam_dds- Playback path: /etc/pndbotics/pnd_adam_dds/Sources/motion |
|
| X | Walking | Switch from Walking Mode back to Standing Mode | |
| Walking Mode | Y | Standing / Running | Enter Walking Mode from Standing Mode. Joysticks control walking and rotation speed |
| Left Joystick (Vertical) | Walking | Control forward / backward speed | |
| Right Joystick (Horizontal) | Walking | Control yaw angular velocity | |
| D-pad | Walking | Control lateral position compensation | |
| RB | Running | Switch from Running Mode back to Walking Mode | |
| Running Mode | RB | Walking | Enter Running Mode from Walking Mode. Joysticks control running and rotation speed |
| Left Joystick (Vertical) | Running | Control forward / backward speed | |
| Right Joystick (Horizontal) | Running | Control yaw angular velocity | |
| D-pad | Running | Control lateral position compensation | |
| Developer Mode | LO + RO | Damping Mode | Enter Developer Mode from Damping Mode. Receive user control data for custom control |
| LT + B | Developer Mode | Exit user control and return to Damping Mode | |
| Actuator Power Off | LB + RB | Any Mode | Immediately cut off power in emergency situations |
| Actuator Power On | Y + B | Power On | Used for legacy step-by-step startup and recovery after emergency power-off |
Button Description
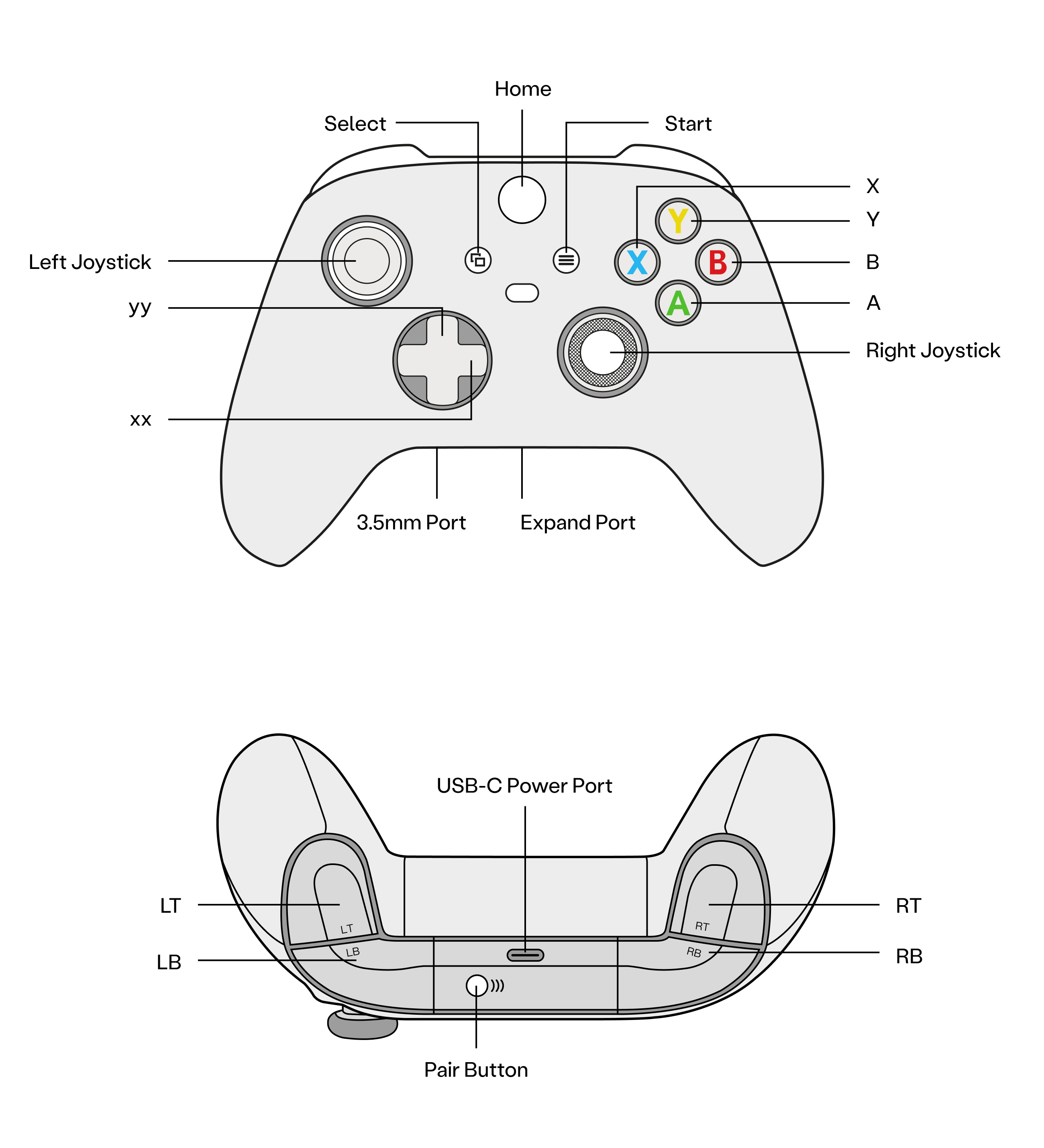
Pairing & Connection
The controller is paired by default at the factory and connects automatically after power-on.
If you need to replace the controller and re-pair it, follow the steps below:
- Enter the robot IP in the browser:
192.168.XX.XX(found on the back of the controller) to access the PAC interface. - Press and hold the controller pairing button until the indicator light flashes rapidly.
- Click Wireless Settings, find the device name Xbox Wireless Controller under Available Devices, and click to pair and connect.

Last Updated: 2026-02-03