快速开发(仿真)
本文介绍了使用pnd_sdk_python 或 pnd_ros2 对Adam进行快速开发。配套仿真框架pnd_mujoco,在用户计算机上实现Mujoco平台的模拟仿真。
系统环境
推荐在 Ubuntu 22.04 x86_64 系统下进行开发,暂不支持 Mac、Windows。
安装 Mujoco
# 安装mujoco平台
cd ~
pip3 install mujoco==3.2.0
# 安装pnd_mujoco
cd ~
git clone https://github.com/pndbotics/pnd_mujoco.git
🔗 参考链接:Mujoco,pnd_mujoco
安装 SDK
请选择sdk类型
# 安装系统依赖
sudo apt install libyaml-cpp-dev libspdlog-dev libboost-all-dev libglfw3-dev python3-pip
# 安装 Python SDK
cd ~
git clone https://github.com/pndbotics/pnd_sdk_python.git
cd pnd_sdk_python
sudo pip3 install -e .
🔗 参考链接:pnd_sdk_python
# 下载&编译 pnd_ros2
git clone https://github.com/pndbotics/pnd_ros2.git
cd pnd_ros2
colcon build
source install/setup.bash
默认使用DDS通讯,切换为ROS2:
-
打开配置文件
config.py -
修改SDK类型为ROS2:
🔗 参考链接:pnd_ros2
仿真测试
控制示例
按照具体型号修改配置文件config.py
修改首行代码为Lite型号
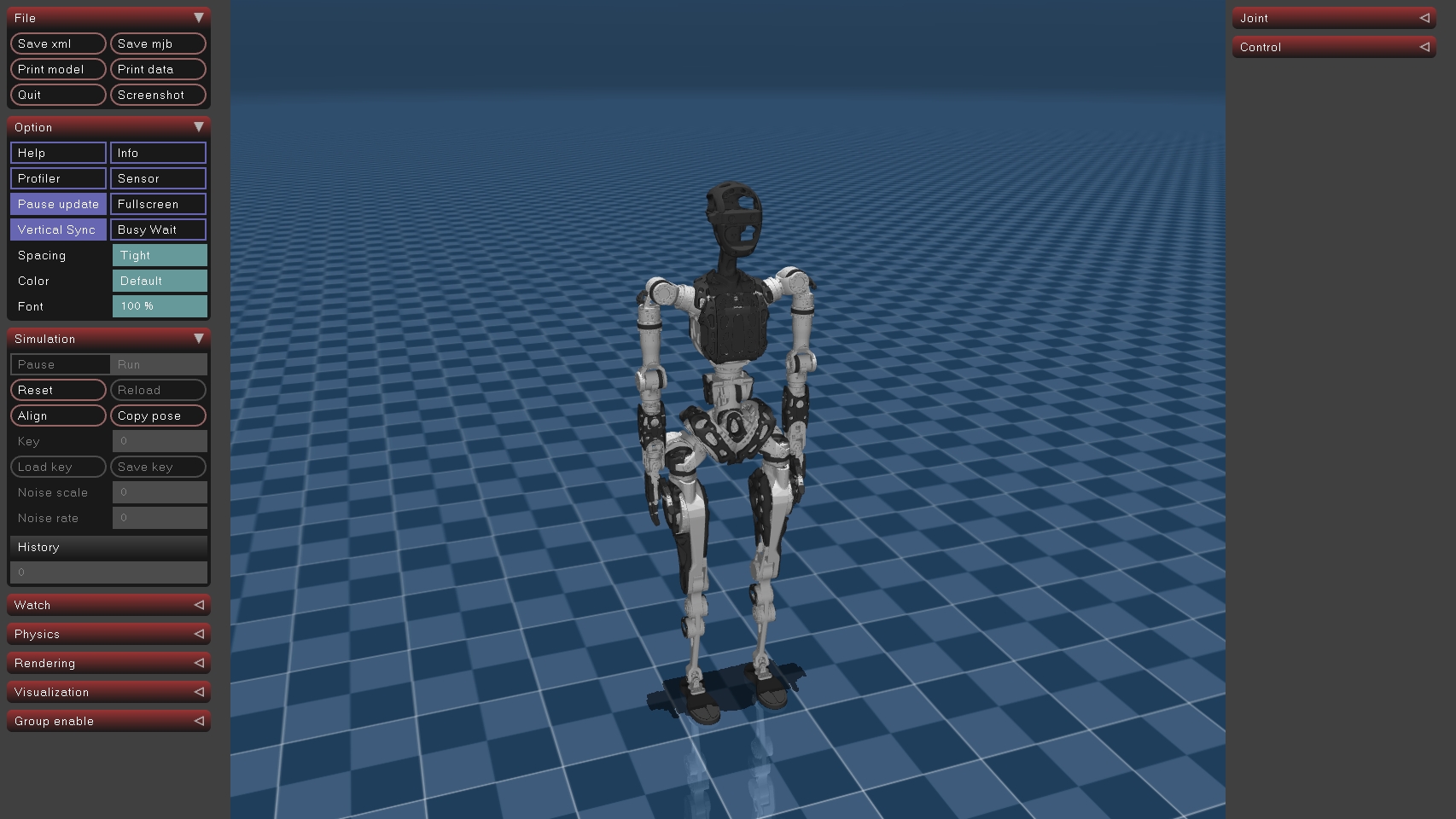
启动mujoco
打开一个新的终端
# 运行pnd_sdk_python控制示例
cd ~/pnd_sdk_python/example/low_level/adam_lite
python3 adam_lite_low_level_example.py
# 或运行pnd_ros2控制示例
cd ~/pnd_ros2/example/low_level/adam_lite
python3 adam_lite_low_level_example.py
观察机器人脚踝运动,表示示例运行成功。

按照具体型号修改配置文件config.py
修改首行代码为SP型号
启动mujoco
打开一个新的终端
# 运行pnd_sdk_python控制示例
cd ~/pnd_sdk_python/example/low_level/adam_sp
python3 adam_sp_low_level_example.py
# 或运行pnd_ros2控制示例
cd ~/pnd_ros2/example/low_level/adam_sp
python3 adam_sp_low_level_example.py
观察机器人脚踝运动,表示示例运行成功。