快速开始
开箱
- 两人协作,分别站在机器人头部和腿部位置。
- 一人用悬挂扣固定 Adam,另一人抬起腿部,将其从箱子中取出。
提示
头部安装:将脖子底部螺丝孔对准连接处,用螺丝钉固定(末端有 19V/6A 电源线和网口线)。
充电说明
注意
机器人初始可能低电量,使用前必须充满电。
- 充电器先插电源,再将插头接入机器人充电口。
- 调节充电器旋钮,选择10A 电流(建议值)。
教学视频
开机流程
注意
- 紧急情况优先短按遥控器组合键 LB + RB 断电,再按机身红色急停按钮。
- 单次使用时间不超过 30 分钟,避免过热。
- 操作时需保持悬挂状态,防止摔倒。
Step1: 全身检查
检查执行器连接线是否牢固,确保机身红色急停按钮弹起。

Step2: 网络连接
使用网线插入PND路由器 WAN 口,接通电源后等待 30s,路由器指示灯由红变白表示连接成功。

用户计算机连接路由器 Wi-Fi:
名称: pndbotics
密码: pnd1234567
Step3: 启动上电
Step3.1: RCU启动
短按(1s)机身胸部电池盖下方左侧金色按钮,此时出现的两种情况可判断RCU固件版本:
-
若RCU指示灯紫色快速呼吸,表示RCU启动成功, FW_version < v0.3.0。

-
若RCU指示灯未亮起,表示RCU启动失败, FW_version ≥ v0.3.0。

请选择对应版本
Step3.2: NUC启动
-
短按机身胸部电池盖下方右侧银色按钮启动NUC。

-
等待约20s后RCU指示灯紫色慢速呼吸,表示NUC启动成功,通信正常。
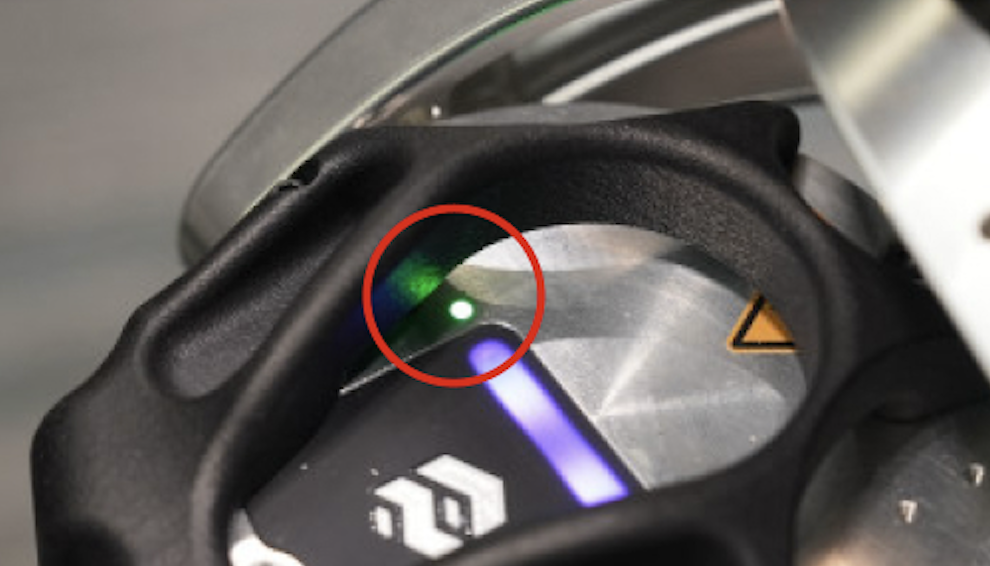
Step3.3: 执行器上电
短按金色按钮 或 短按遥控器组合键 Y + B 。
等待 7-8s,执行器指示灯紫色慢速呼吸、绿色常亮,表示执行器上电成功,通信正常。

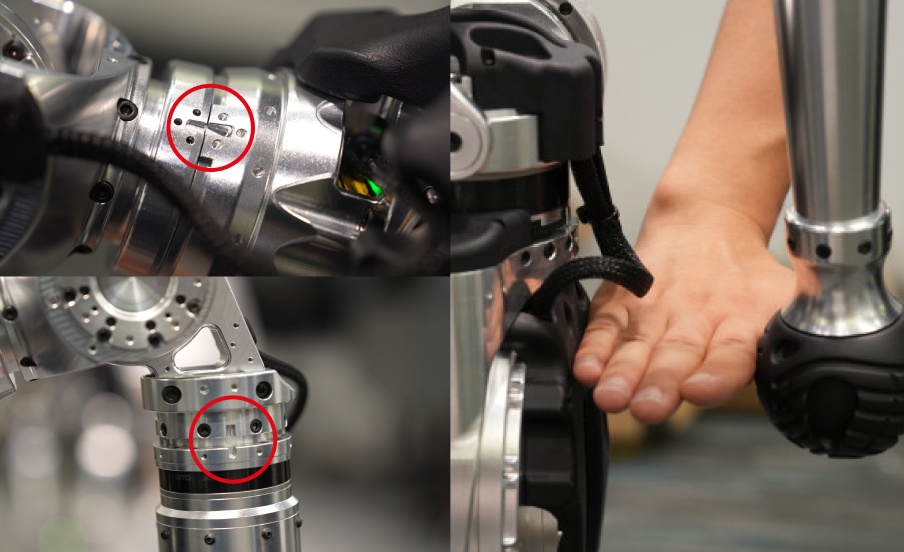
Step3.4: 零位校准 (仅适用非全身绝对编码器版本,绝对编码器版本可忽略。)
Adam 的双臂和肩膀需要手动校准至零位。每次开机,应执行此操作一次。
操作员握住机器人手臂,保持以下状态:
- 手臂伸直
- 肩部、手臂卡槽对齐
- 手部距身体一掌宽
 提示:需持续保持零位,直至另一操作员在电脑上完成后续操作。
提示:需持续保持零位,直至另一操作员在电脑上完成后续操作。
Step3.5: Demo 启动(三选一,禁止同时使用)
Step3.5.1: 使用PAC启动
- 浏览器输入机器人IP:
192.168.XX.XX(遥控器背面获取)进入PAC界面。 - PAC页面点击 demo 启动。
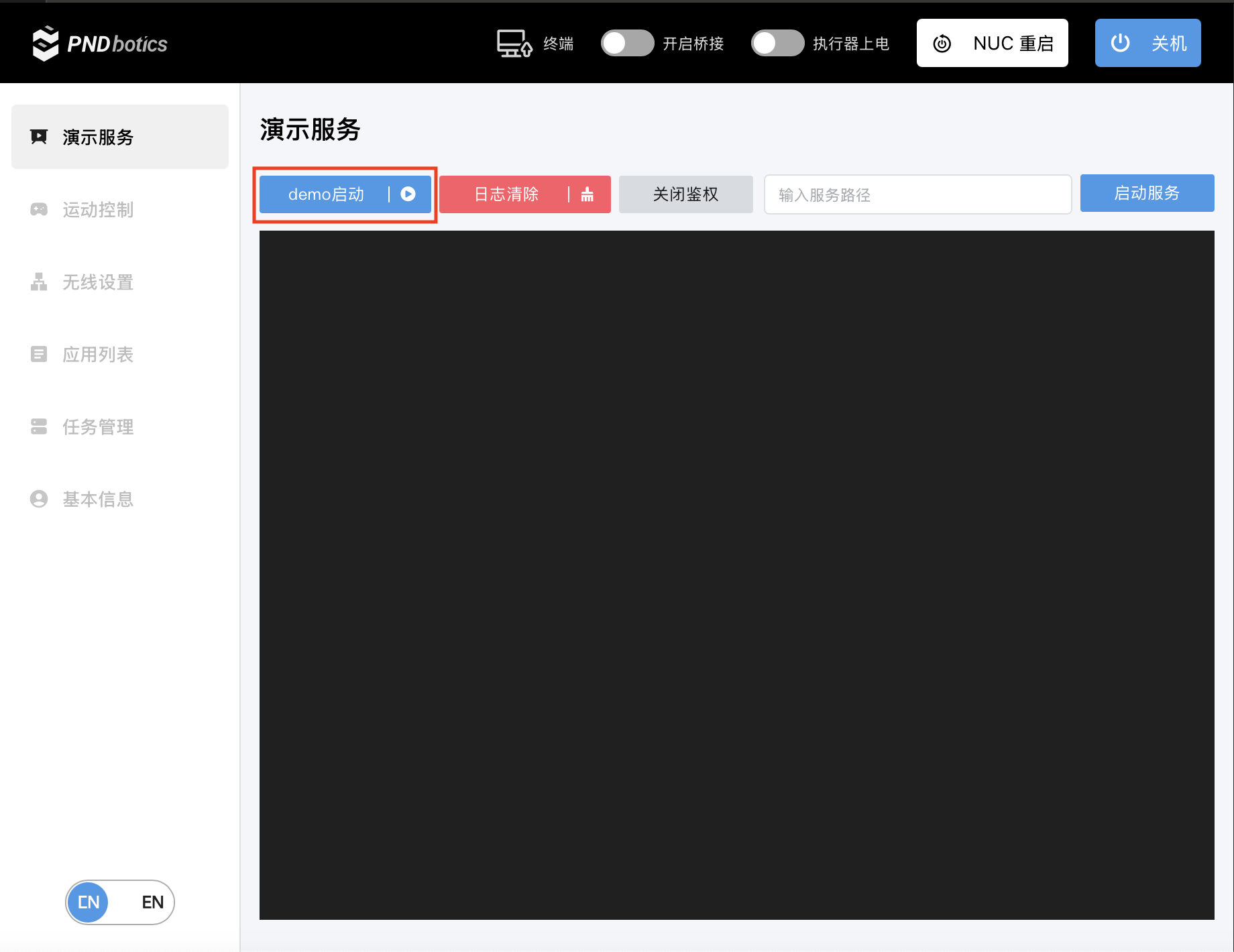
页面显示 "started!" 表示Demo启动成功。
Step3.5.2: 使用遥控器一键启动
若已使用PAC启动,请跳过此方式。
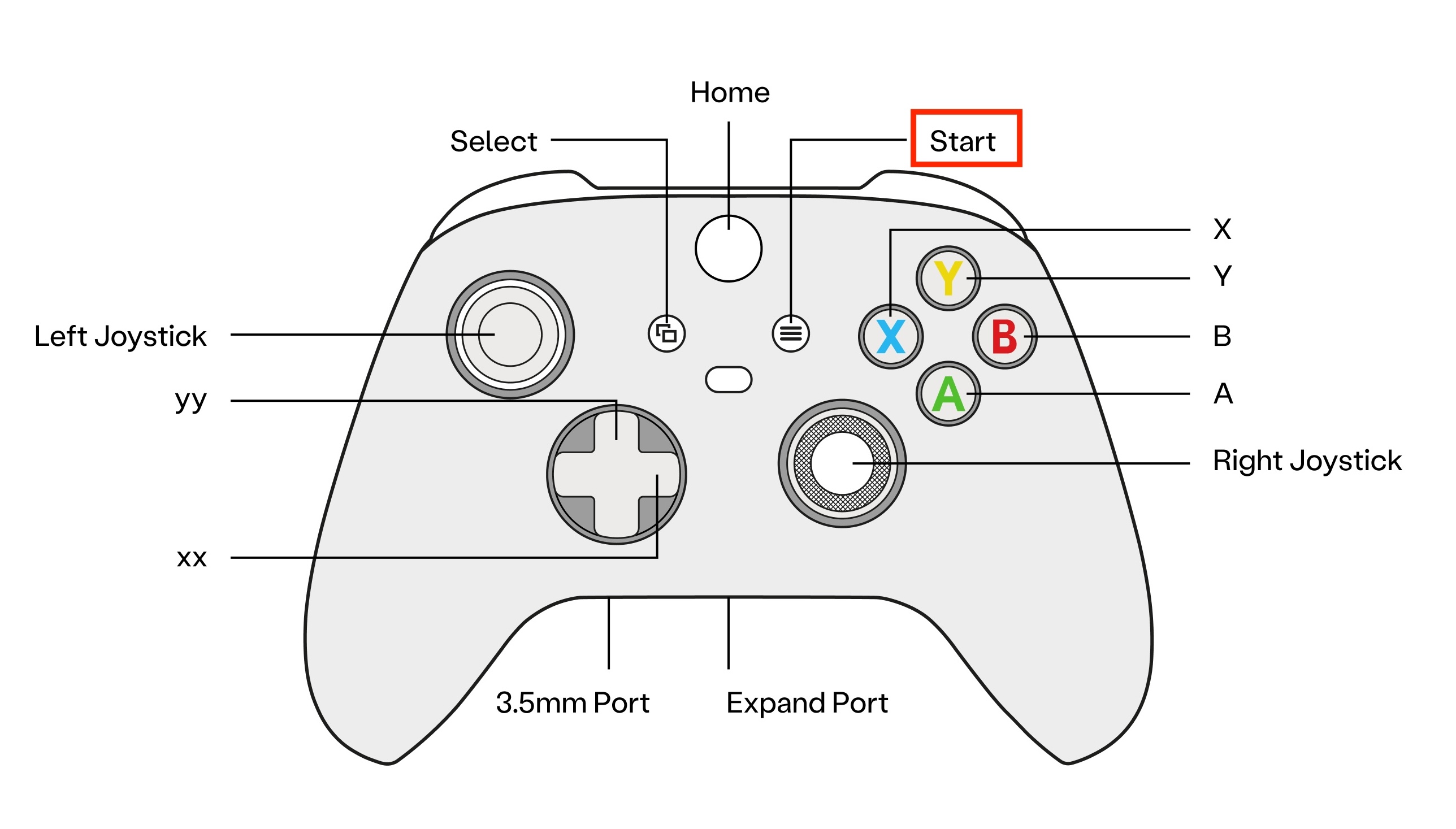
长按遥控器start键5s,执行器指示灯绿色常量变为绿色快速闪烁表示Demo启动成功。
Step3.5.3: 使用SSH启动
若已使用PAC或遥控器启动,请跳过此方式。
-
在终端输入
ssh pnd-humanoid@192.168.XX.XX(替换为实际IP)连接 NUC,密码:pndxyz -
进入 demo 目录:
cd /home/pnd-humanoid/Documents/adam_demo/bin -
启动 Demo:
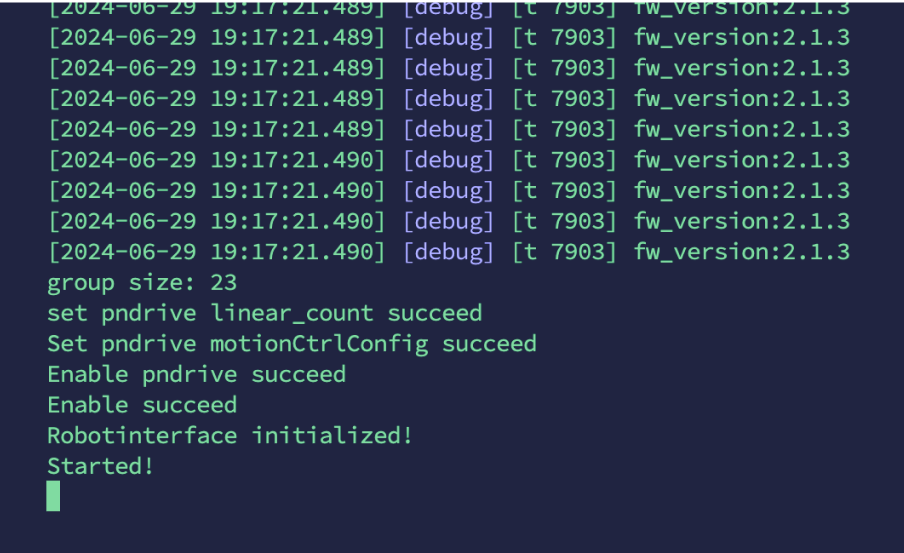
sh run.sh
终端输出 Started!表示Demo启动成功,显示 roll/pitch/yaw 等姿态信息。
一键启动
长按3s机身胸部电池盖下方左侧金色按钮,RCU指示灯紫色慢速呼吸:
等待10s,机器人全身执行器指示灯紫色慢速呼吸且执行器指示灯绿色快速闪烁,表示Demo启动成功,机器人进入阻尼模式,可直接进行真机控制。
提示
- 指示灯未亮/Demo启动失败:检查红色急停按钮是否弹起。
- 指示灯变红:短按金色按钮执行器下电,再次短按重新上电。
真机控制
1. 零位模式
- 短按遥控器 Home 键开机,指示灯稳定亮起后,表示自动连接完成。
- 短按遥控器 A 键进入零位模式,检查姿态正常则继续;异常需用定位销重新标零。(联系support)
- 异常处理:运行
sh run.sh若显示 “vn time out” 或 “abs miss”,可等几秒重试;其他错误见FAQ
2. 着地检查
下降悬挂绳,使机器人双脚完全着地,确认姿态为直立。
若出现飘移(姿势倾斜)可关机后重新开机等待30s。

3. 站立模式
短按遥控器 X 键,机器人进入站立模式。

4. 行走模式
在站立模式下,短按遥控器 Y 键,进入行走模式,控制逻辑:
- 左摇杆上下 → 前进 / 后退速度
- 右摇杆左右 → 转向
- 左十字键横轴 → 横向位移
切换:短按 X 键切换站立模式。

5. 跑步模式
- 在行走模式下,短按遥控器 RB 键进入跑步模式(速度控制同行走);
- 切换:短按 RB 键切换行走模式。

6. 预定动作
站立模式下短按 RB 键执行动作,完成后再短按 RB 执行下一个动作。

关机流程
Step1: 阻尼模式
在站立模式下,收紧悬挂绳,短按遥控器组合键 LT+B 键进入阻尼模式。
此操作后关节将失力,需确保机器人已正确悬挂。

Step2: 安全悬挂
升起悬挂绳,使机器人双脚离地。
Step3: 关机
长按机身金色按钮6s,紫色RCU指示灯熄灭,关机成功。

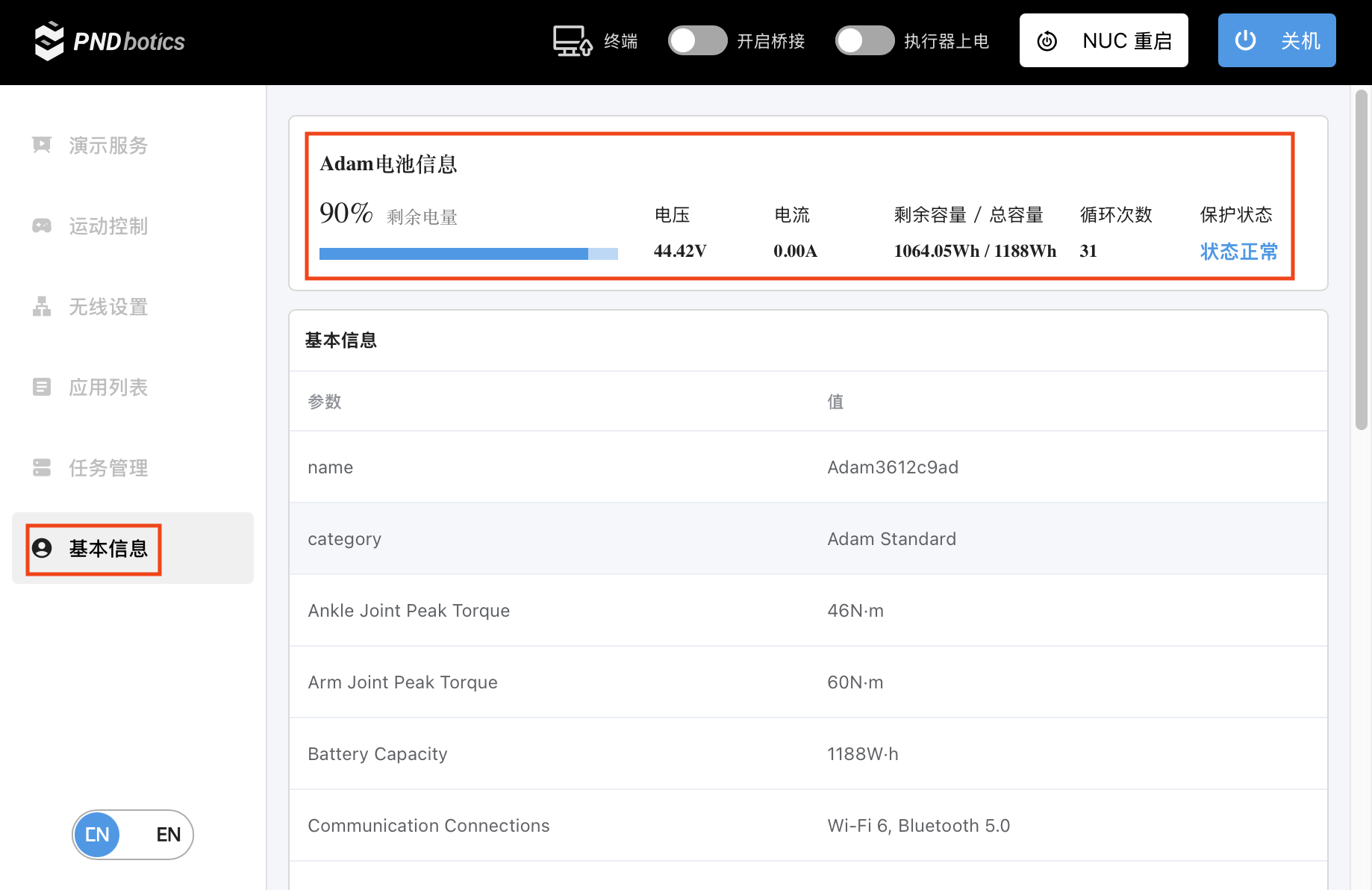
电池管理
- 保持机器人开机,电脑连路由器 Wi-Fi(与机器人同网络)。
- 浏览器输入机器人IP:
192.168.XX.XX(遥控器背面获取)进入PAC界面。 - 在“基本信息”中查看电池电量。
最新修订日期: 2026-01-23