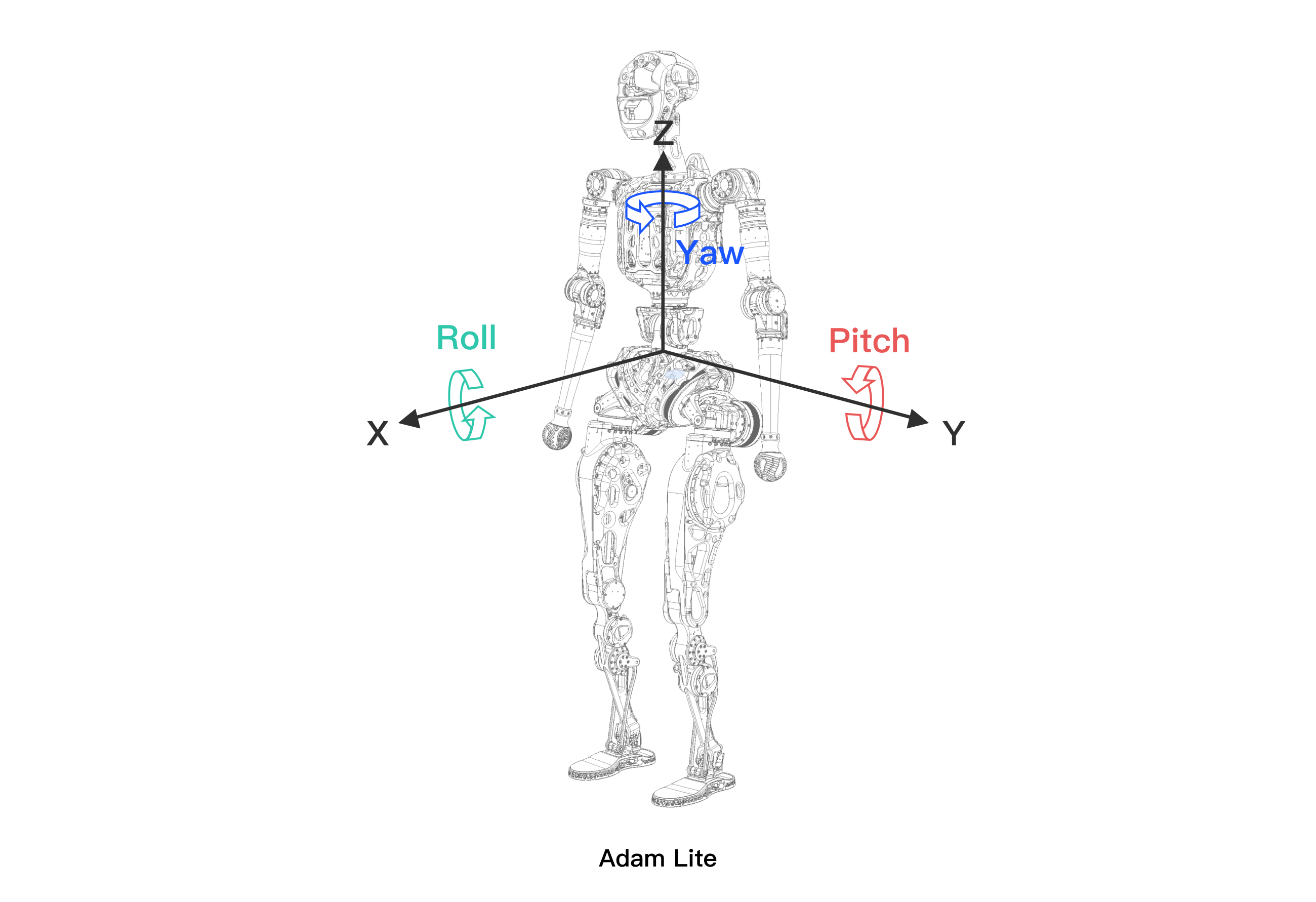
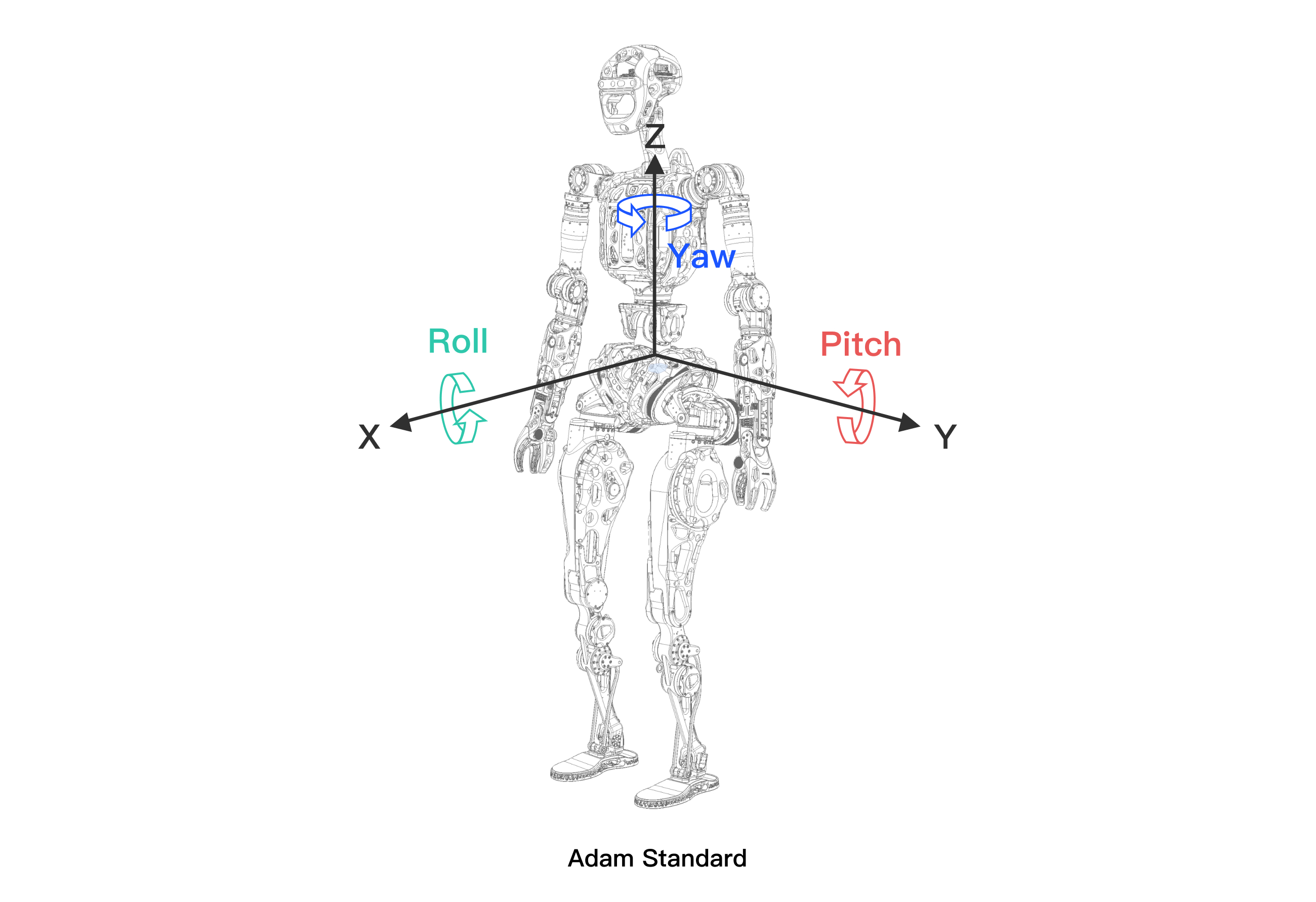
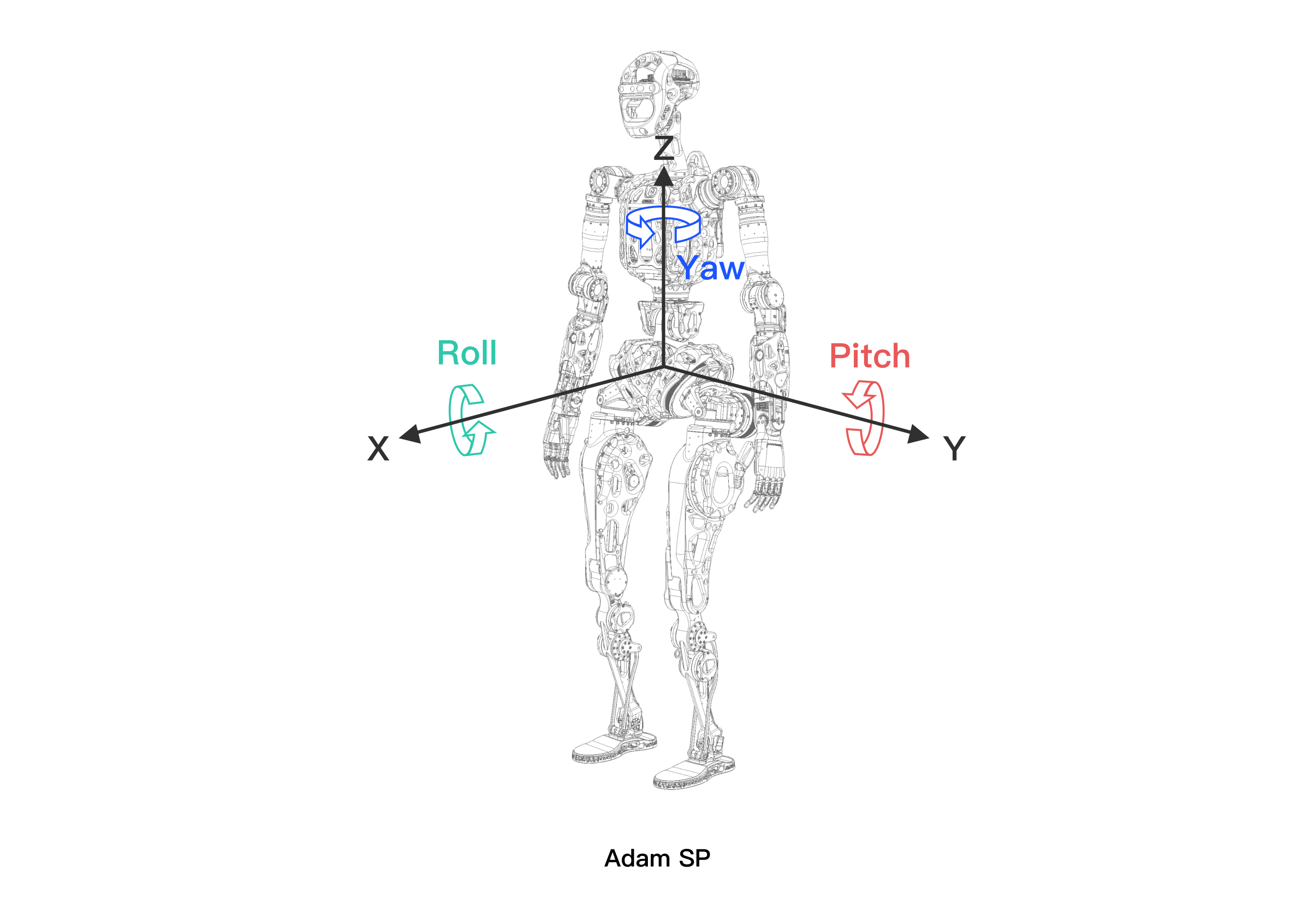
坐标系定义
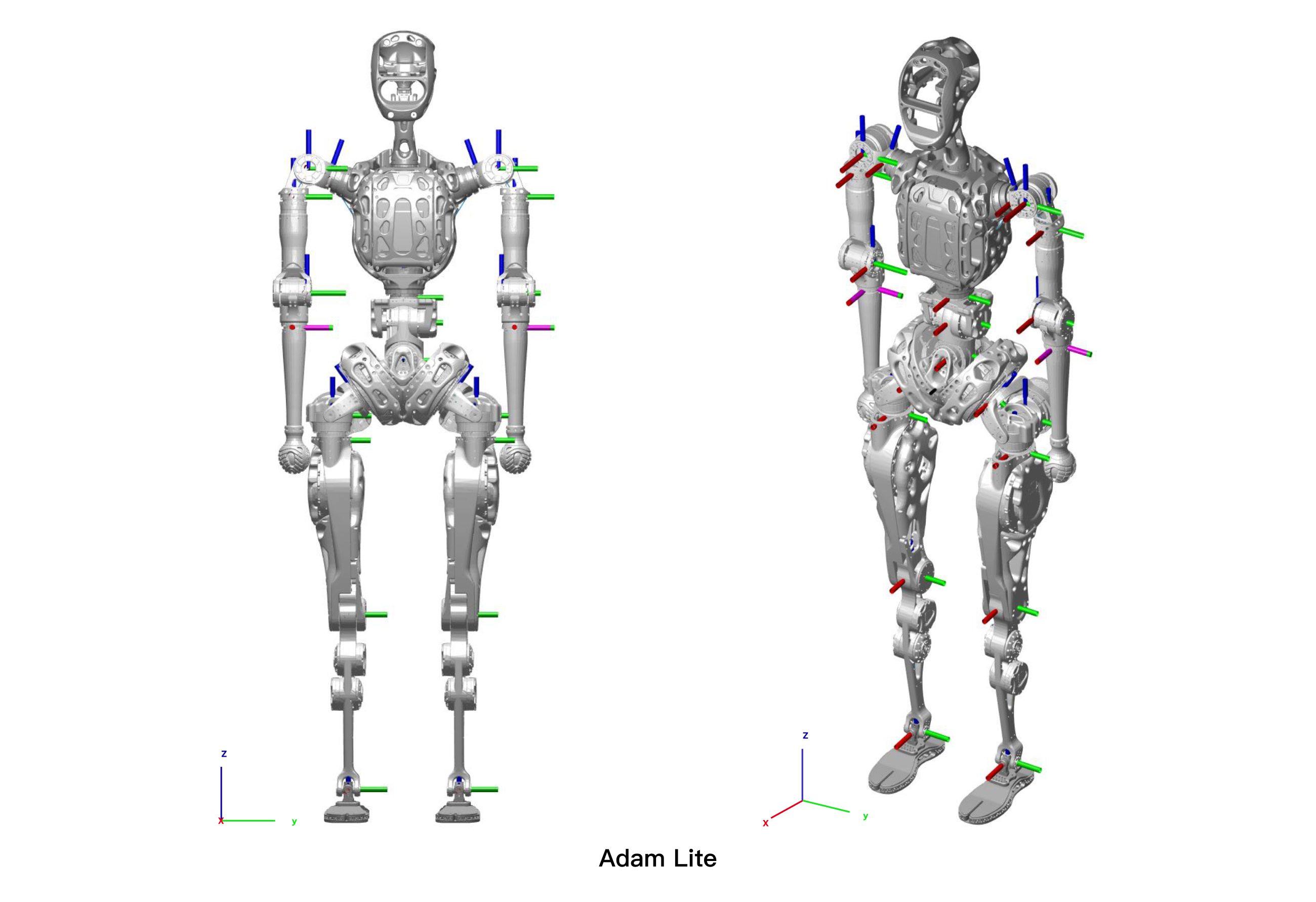
Adam Lite
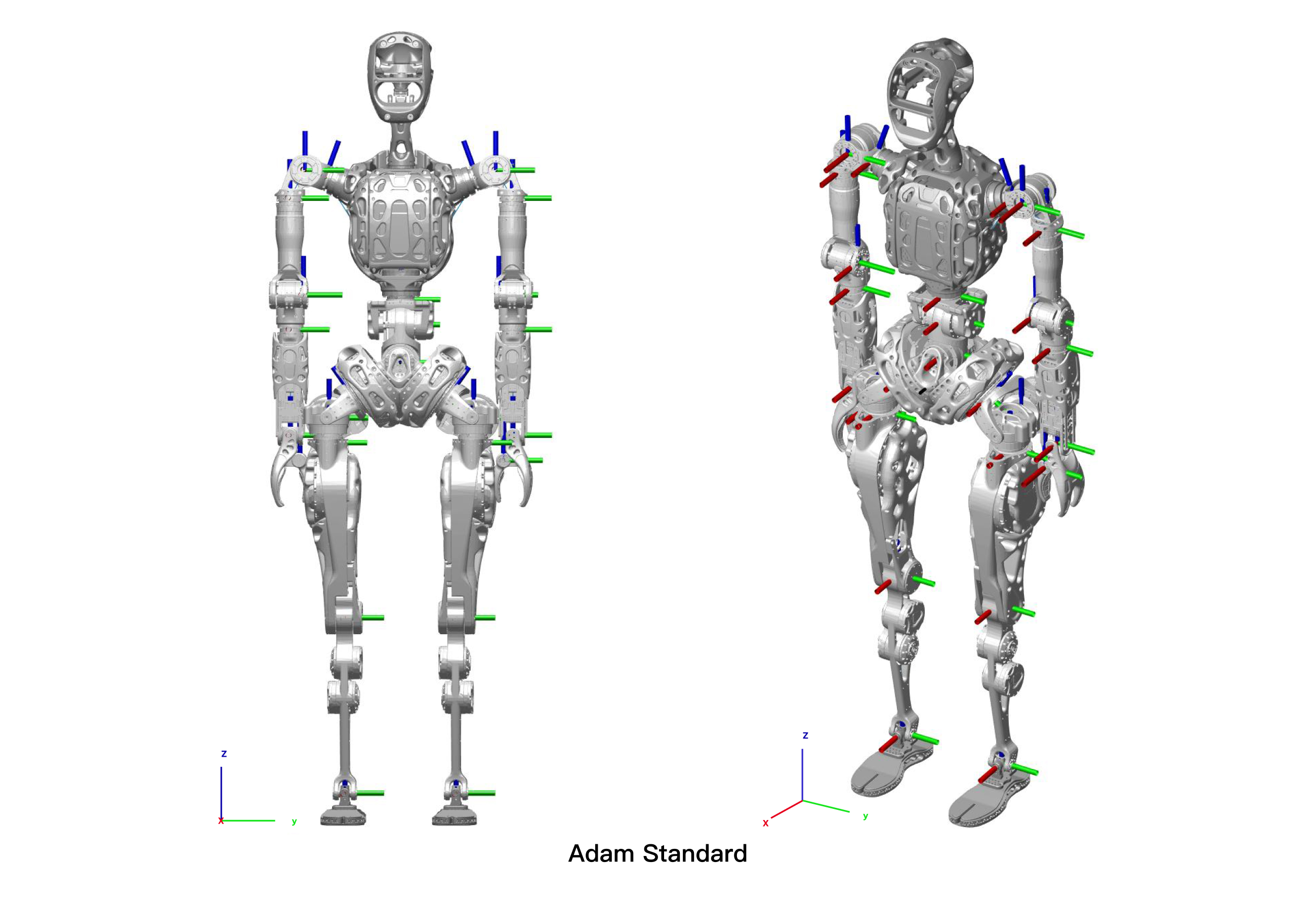
Adam Standard
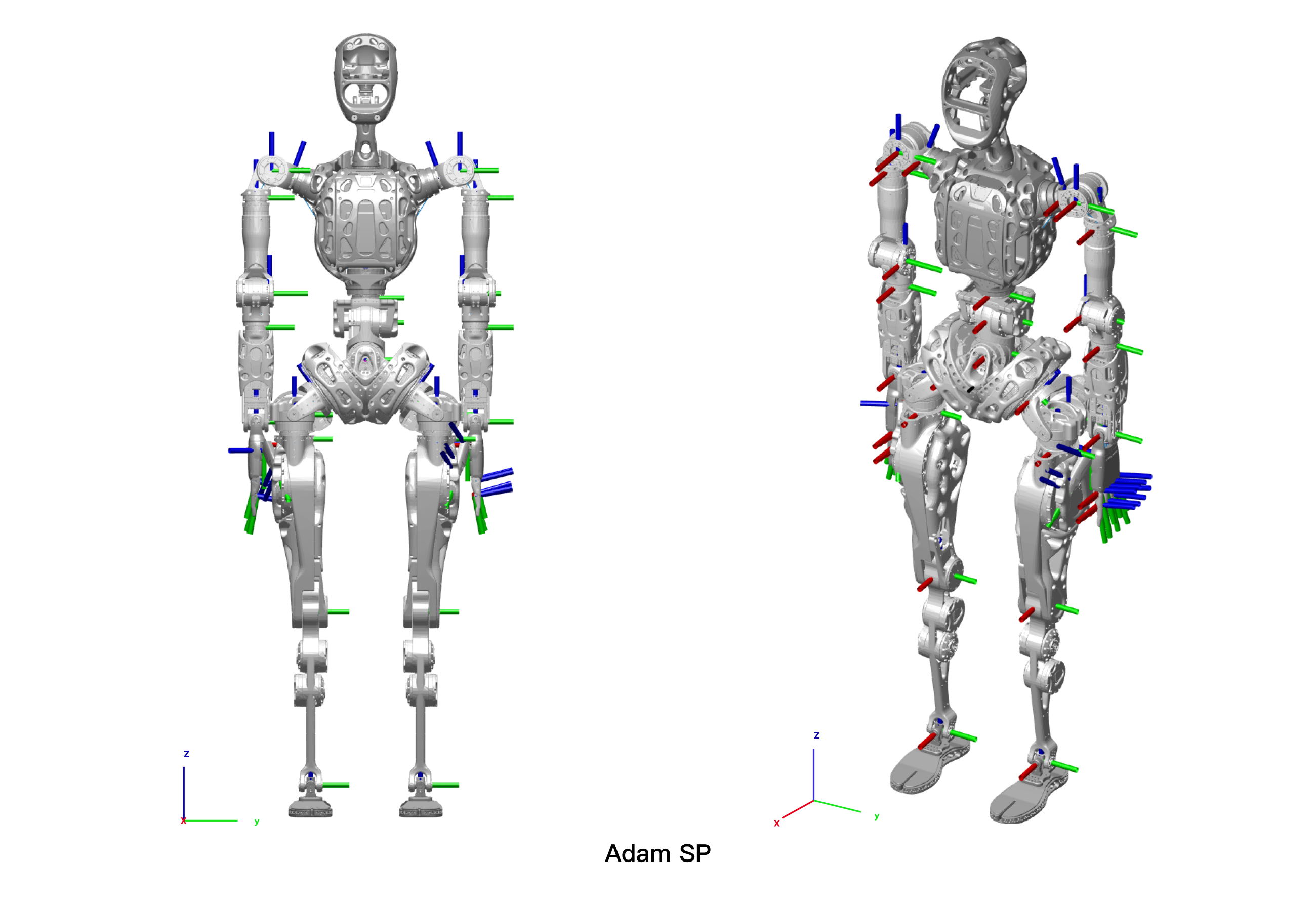
Adam SP
坐标系,关节旋转轴与关节零点
当各个关节均为零度时,各坐标系如下图,红色为x轴,绿色为y轴,蓝色为z轴
踝关节正向运动学
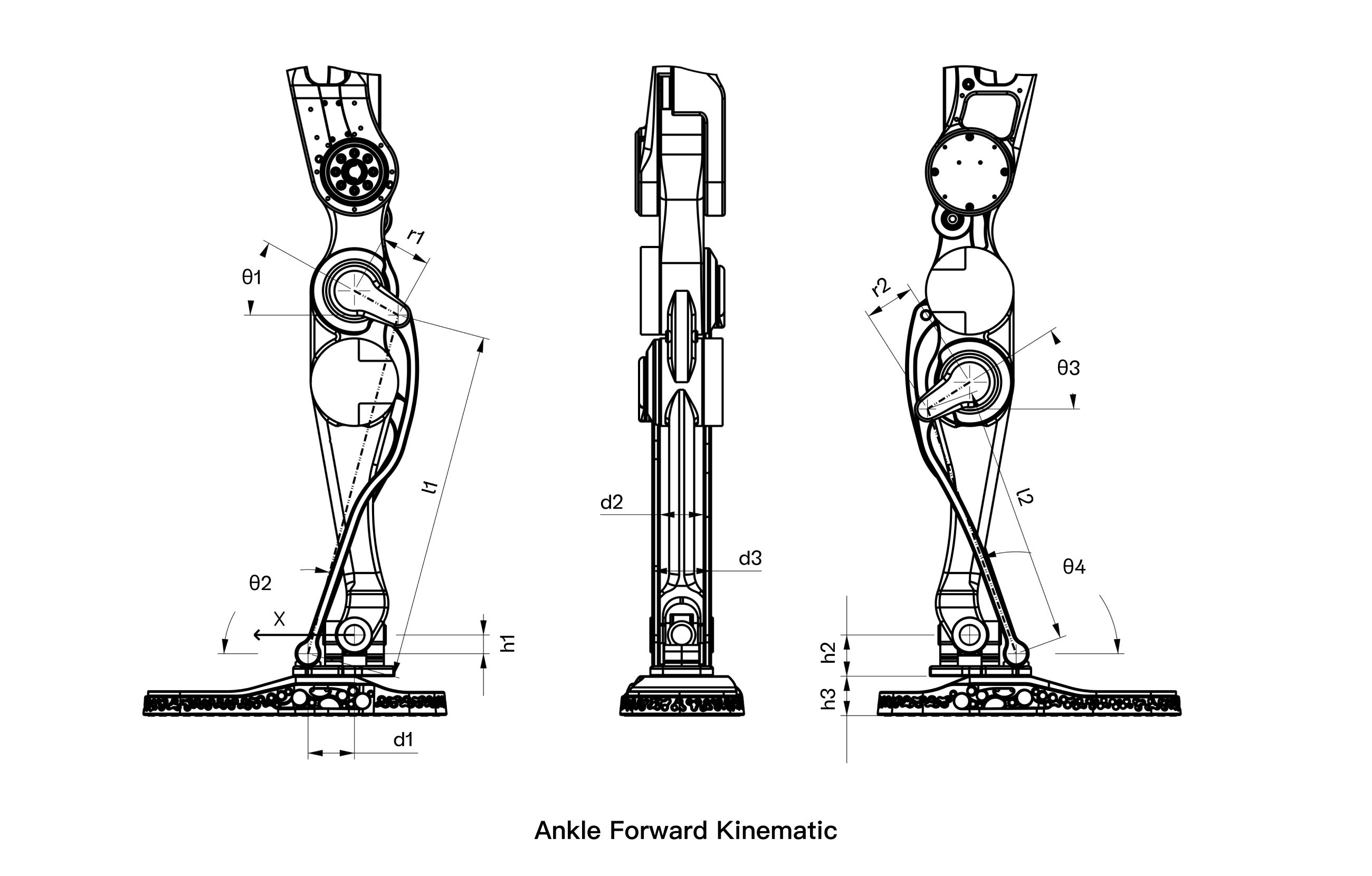
| 参数表 | |||
|---|---|---|---|
| θ1=0.51rad | r1=40.00mm | h1=15.00mm | d1=37.10mm |
| θ2=1.83rad | r2=40.00mm | h2=33.00mm | d2=35.00mm |
| θ3=0.57rad | l1=280.00mm | h3=31.50mm | d3=47.00mm |
| θ4=1.92rad | l2=208.00mm |
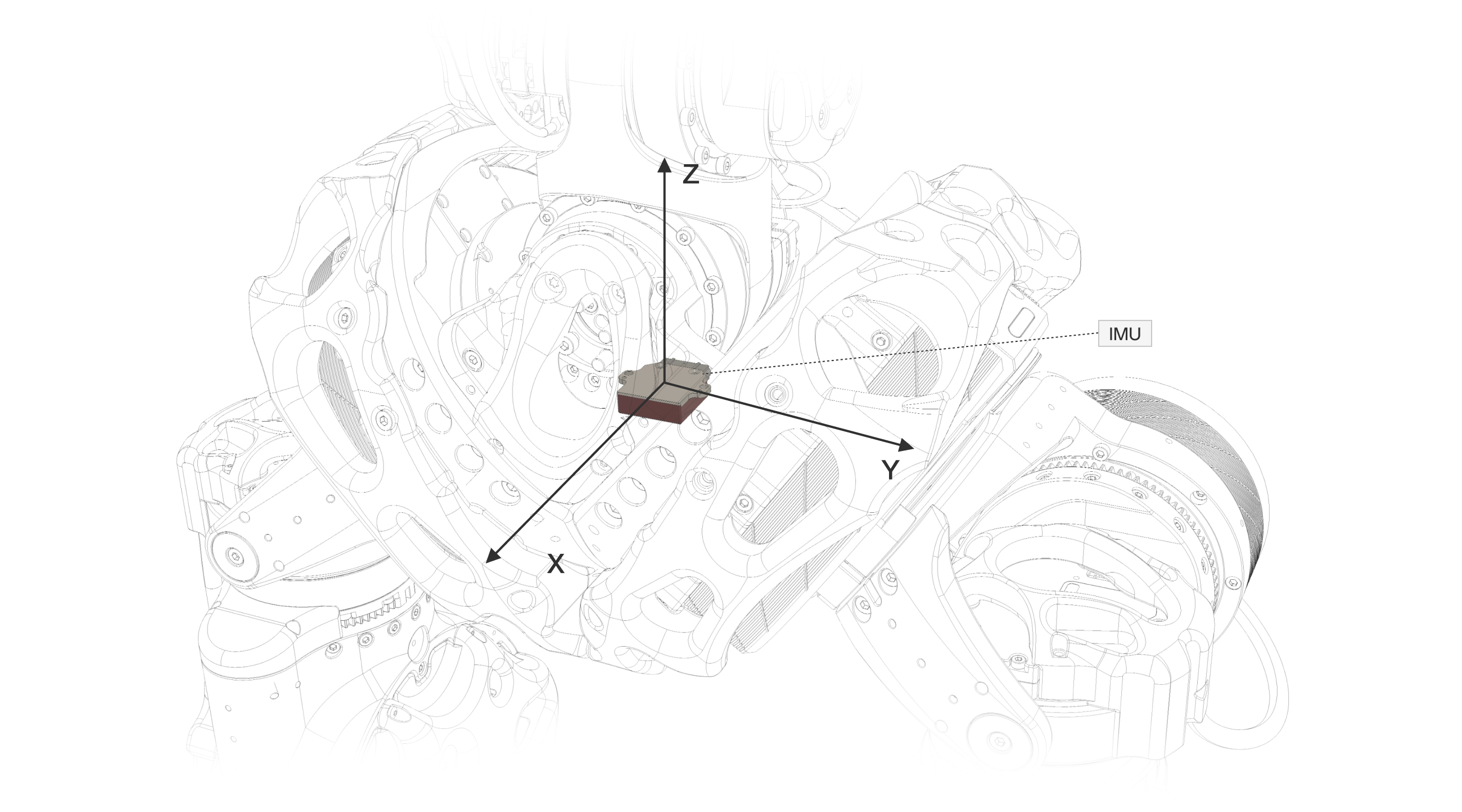
IMU 坐标系