Quick Development (Real)
This document introduces rapid development for Adam using pnd_sdk_python. By connecting the robot to the user's computer via a wired connection, real robot control is achieved.
System Environment
Development is recommended on Ubuntu 22.04 x86_64.
macOS and Windows are not supported at this time.
SDK Installation
# Install system dependencies
sudo apt install libyaml-cpp-dev libspdlog-dev libboost-all-dev libglfw3-dev python3-pip
# Install Python SDK
cd ~
git clone https://github.com/pndbotics/pnd_sdk_python.git
cd pnd_sdk_python && sudo pip3 install -e .
🔗 For more details, refer to: pnd_sdk_python
Environment Configuration
- Use an Ethernet cable to connect the robot and the user computer.
The Ethernet port is located on the back of the robot.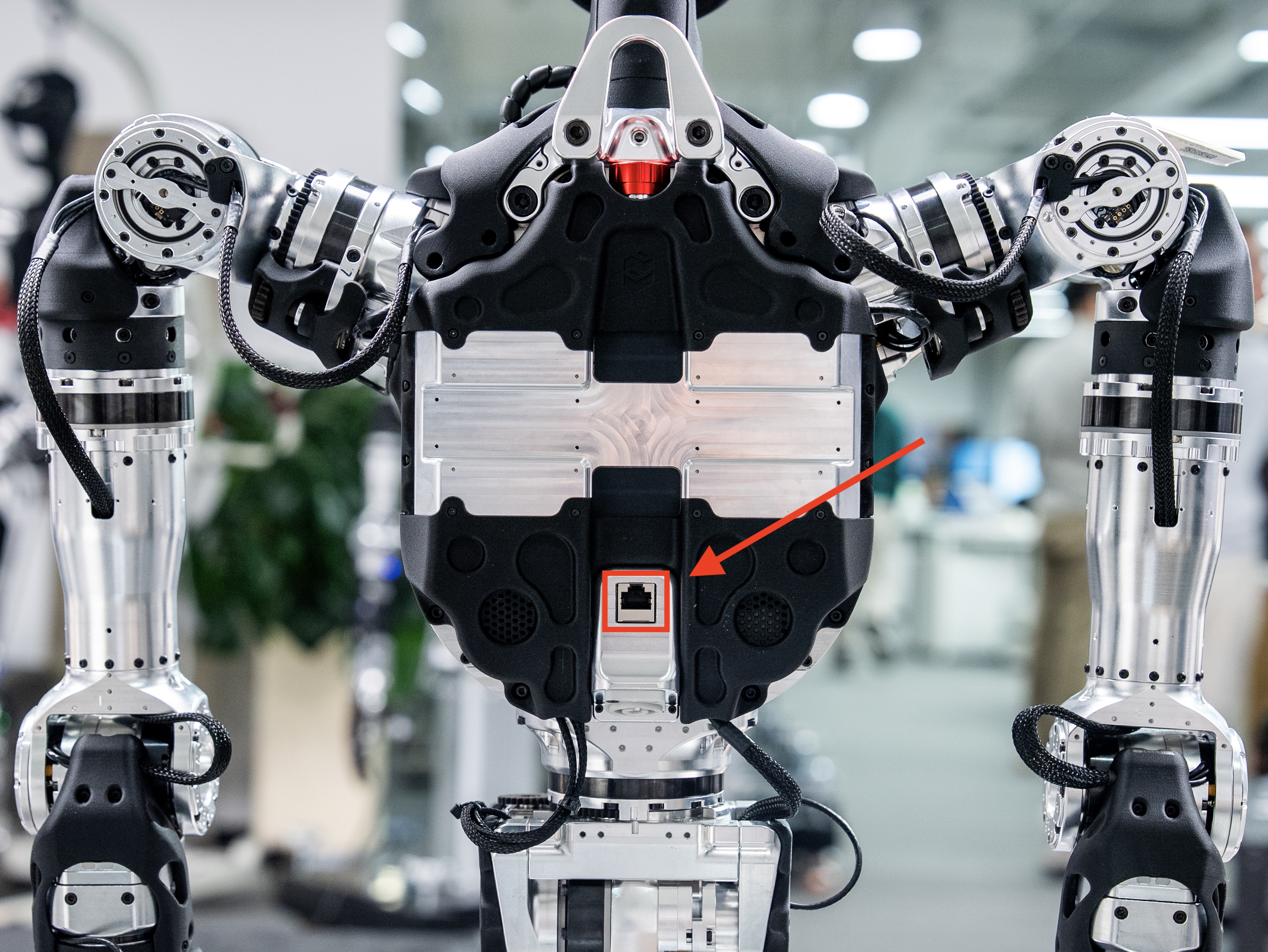
- On the user computer, configure the network to be on the same subnet as the robot.
Modify the IP address, for example:10.10.20.XXX

Developer Mode
Note
- Confirm that the Demo startup has been completed
- For more operations and mode descriptions, refer to Remote Control Instructions
Ensure the robot is suspended and in Damping Mode, then press the remote control LO + RO (push the joysticks vertically down) to enter Developer Mode.
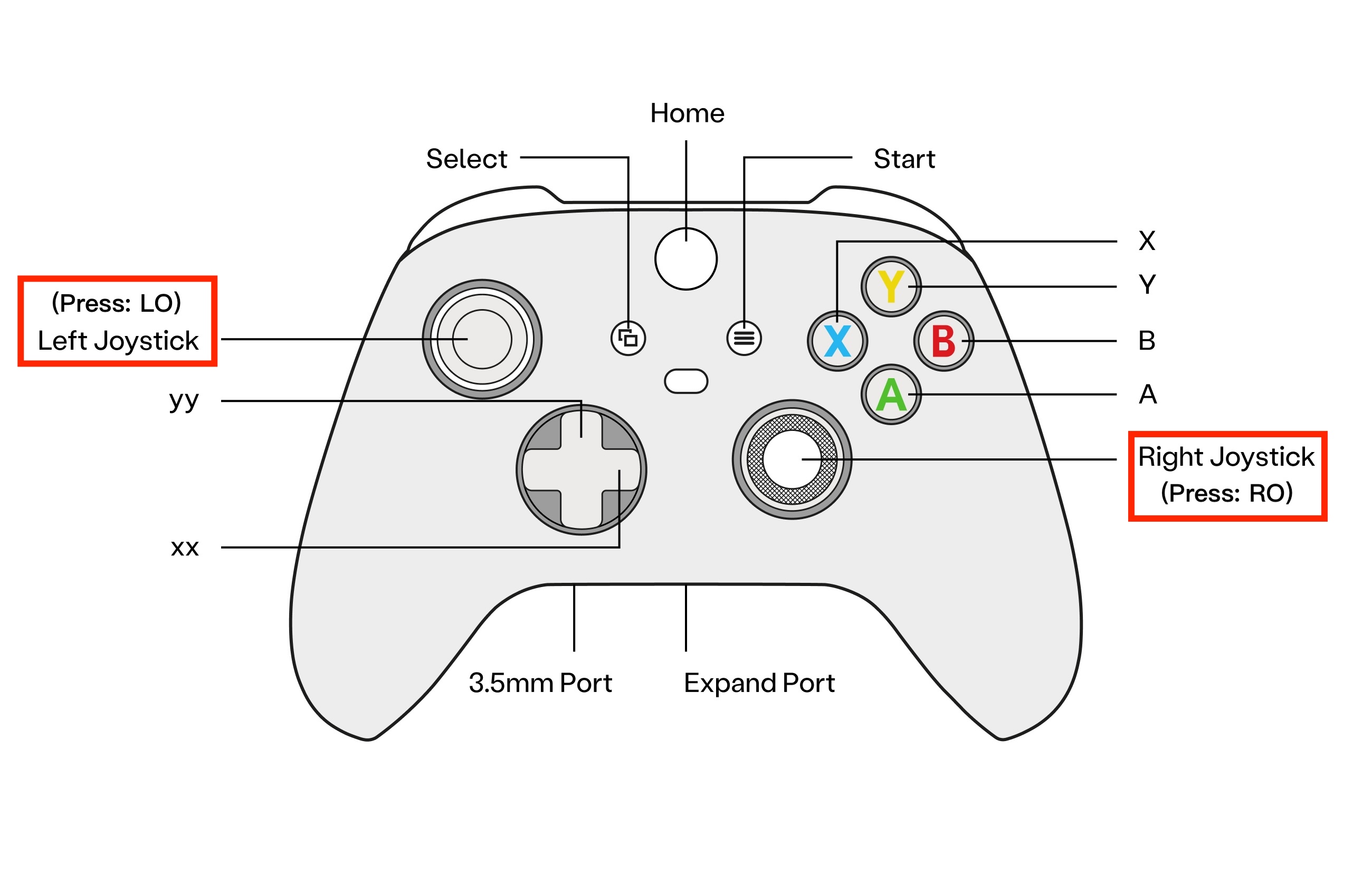
The RCU indicator light will change from purple slow breathing to blue slow breathing, indicating successful entry into Developer Mode. At this point, you can use the SDK for development and debugging.

Run Control Example
This control example will cause the robot's ankles to move. Please ensure that the robot is correctly suspended and that both feet are more than 10cm above the ground.
Open a new terminal:
Control_example
Exiting Developer Mode
Press the remote control LT + B to exit Developer Mode. The RCU indicator light will change from blue slow breathing to purple slow breathing, indicating successful exit from Developer Mode and entry into Damping Mode.