URDF & MJCF
This repository contains PNDbotics model files for simulation and control, including URDF/MJCF descriptions, mesh assets, and more.
- Link: PND Models GitHub
⚠️ Link Orientation Notice (Toe Link Flip Issue)
If you're using the reinforcement learning (RL) examples provided in our Wiki documentation, please double-check the following to ensure correct simulation behavior:
✅ URDF Configuration
In the toe_left and toe_right link definitions, make sure the following configuration is set:
This orientation ensures the correct alignment of toe links in simulation.
✅ Isaac Gym Configuration
In the corresponding *_config.py file used for Isaac Gym training, be sure to set:
The default value is
False, which may cause visual misalignment of the toe components in some models.
Models
| model name | mujoco image |
|---|---|
| adam_inspire |  |
| adam_lite |  |
| adam_lite_agx |  |
| adam_sp |  |
| adam_sp_agx_ir | 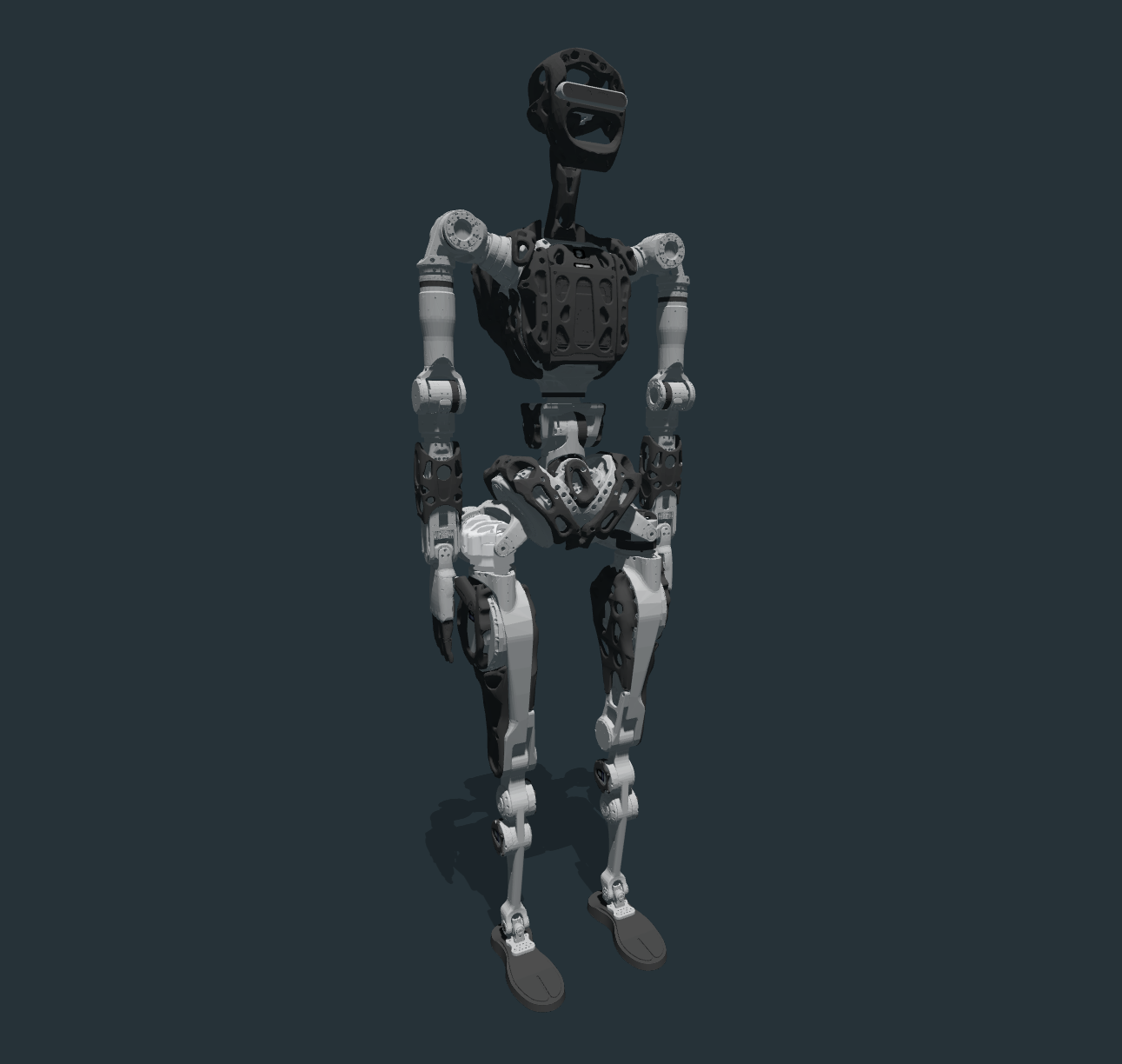 |
| adam_standard |  |
| adam_u | 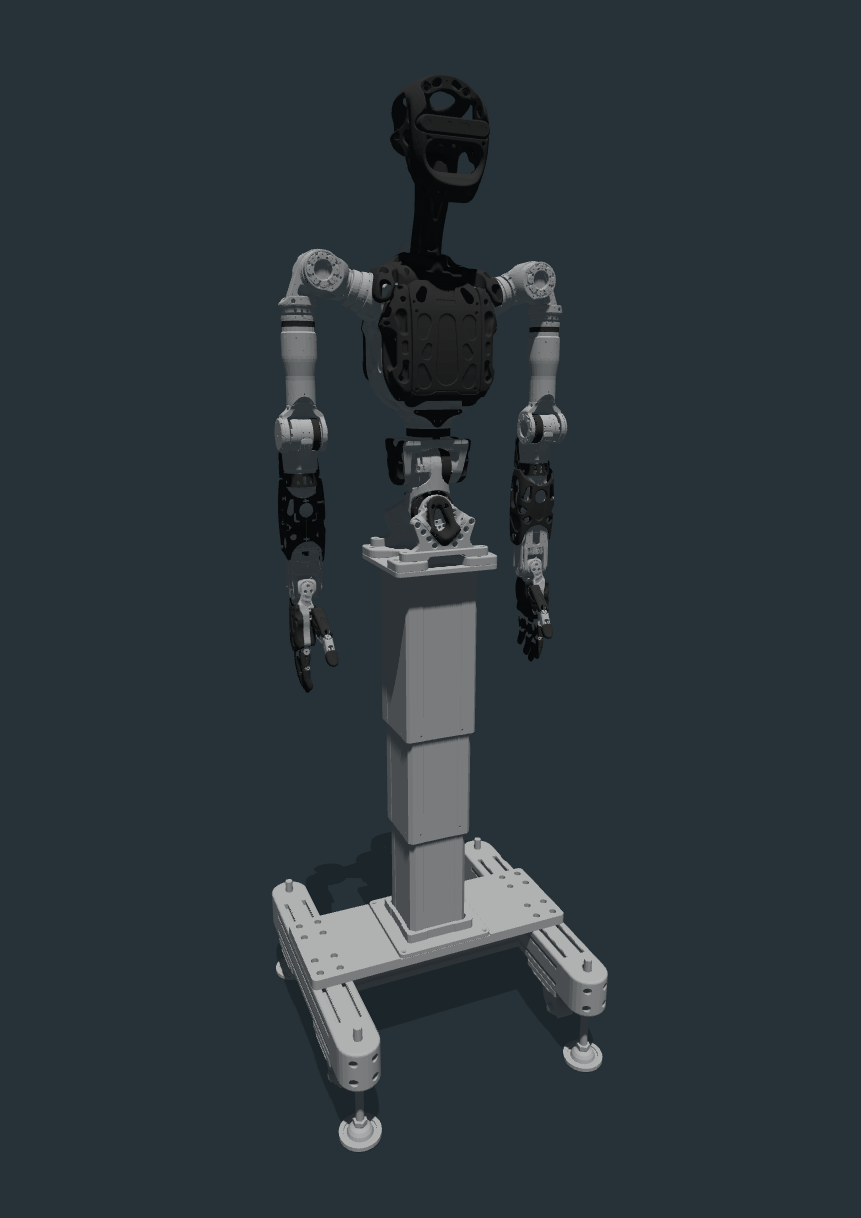 |