🤖 PND Adam Humanoid Robot
 Adam is a full-body robotic system that integrates cutting-edge hardware architecture with an intelligent algorithm platform, offering exceptional motion flexibility, environmental perception, and high-precision dynamic control. Its bionic structure design and human-like motion abilities enable it to perform highly complex tasks in unstructured environments. It is widely applicable across various cutting-edge fields including scientific research experiments, industrial automation testing, medical assistance , and service robotics.
Adam is a full-body robotic system that integrates cutting-edge hardware architecture with an intelligent algorithm platform, offering exceptional motion flexibility, environmental perception, and high-precision dynamic control. Its bionic structure design and human-like motion abilities enable it to perform highly complex tasks in unstructured environments. It is widely applicable across various cutting-edge fields including scientific research experiments, industrial automation testing, medical assistance , and service robotics.
💡 Key Features
🦾 Mechanical System Architecture
- Actuation System: Integrated with up to 41 quasi-direct drive (Quasi-Direct Drive) flexible force-controlled joints, enabling high dynamic precision control and multi-degree-of-freedom dexterous movement.
- Modular Architecture: Features a fully modular actuation system, optimizing production and maintenance efficiency, and meeting large-scale manufacturing needs.
- Bionic Hip Joint Design: An innovative bionic hip structure that significantly enhances the robot's human-like motion and flexibility in complex operational tasks.
- Lower Limb Joint System: Equipped with 4 high-torque density, multi-stage reduction ratio, high-response sensitivity quasi-direct drive force-controlled joints, providing excellent gait performance and dynamic stability.
🧠 Control System & Communication Architecture
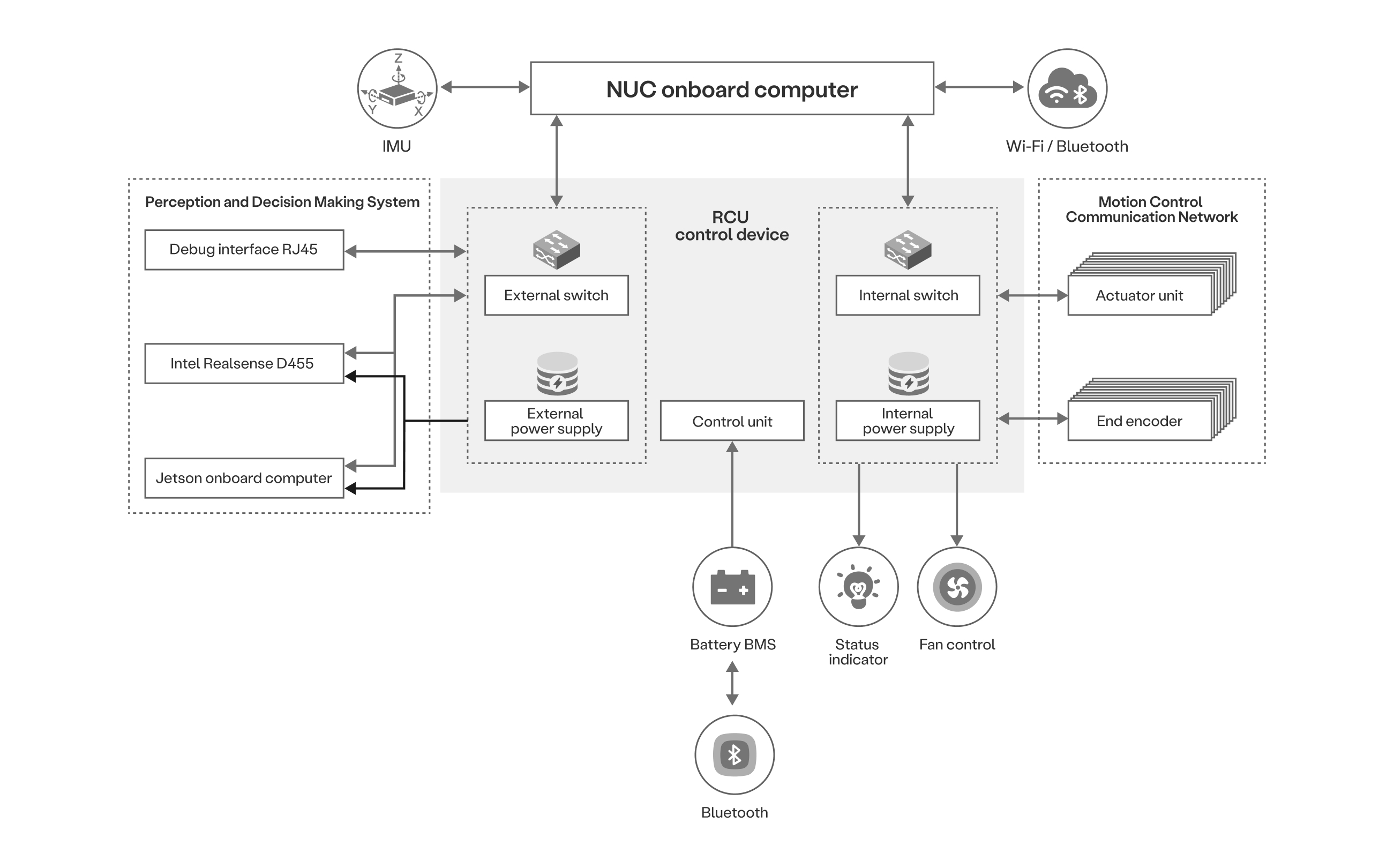
- PND-Network: Proprietary high-real-time communication protocol stack, supporting the integration of multimodal sensors such as LiDAR and visual cameras, enhancing environmental perception and closed-loop control.
- Central Control Unit: Powered by the Intel NUC12WSKi7 processor and a self-developed Robot Control Unit (RCU), coordinating the robot's joint drives, energy management, communication scheduling, and system monitoring.
- AI Computing Platform: The Adam Standard/SP integrates the NVIDIA Jetson Orin NX 16GB embedded module, specialized in high-performance AI inference, visual computing, and real-time decision-making tasks.
- Perception System: Equipped with the Intel RealSense D455 depth vision sensor, achieving high-precision 3D environmental modeling and real-time spatial positioning.
🌀 Dynamic Balance & Motion Planning
- WBC + MPC Algorithm Architecture: A fusion strategy of Whole-Body Control (WBC) and Model Predictive Control (MPC), ensuring the robot's balance robustness and trajectory tracking accuracy in dynamic disturbance environments.
- Reinforcement Learning & Imitation Learning: Utilizes large-scale simulation environments and deep neural network training, combining reinforcement learning and imitation learning strategies to iteratively optimize motion strategies and control performance.
🔋 Energy & Endurance Management
- Intelligent Battery Management System (BMS): Integrated high-precision power monitoring and dynamic power distribution mechanisms to support continuous high-intensity task execution.
- System Energy Efficiency Optimization: Low-power hardware design and dynamic power consumption management strategies significantly enhance the overall system's endurance.
📡 Communication & System Expansion
- Multimodal Communication Capabilities: Compatible with 5G, Wi-Fi 6, Bluetooth 5.0 protocols for high-bandwidth, low-latency remote control and real-time debugging.
- Sensor Expansion Interface: PND-Network features excellent interface expandability, supporting multi-source sensor fusion and system functionality customization, empowering complex scene perception and decision-making capabilities.
🌐 Application Fields
- Scientific Research & Laboratory Scenarios: Suitable for high-precision automated experiments, dynamic system testing, and data acquisition analysis.
- Industrial Automation Production Lines: Achieves high-reliability operations and process optimization in precision assembly, online inspection, and flexible manufacturing.
- Medical Assistance & Rehabilitation: Provides surgical collaboration, rehabilitation training support, and patient monitoring services, adapting to diverse healthcare scenarios.
- Service & Collaborative Robotics: Applicable in logistics sorting, reception guidance, human-robot collaboration, and other intelligent service applications, with high adaptability to various environments.
📊 Technical Specifications
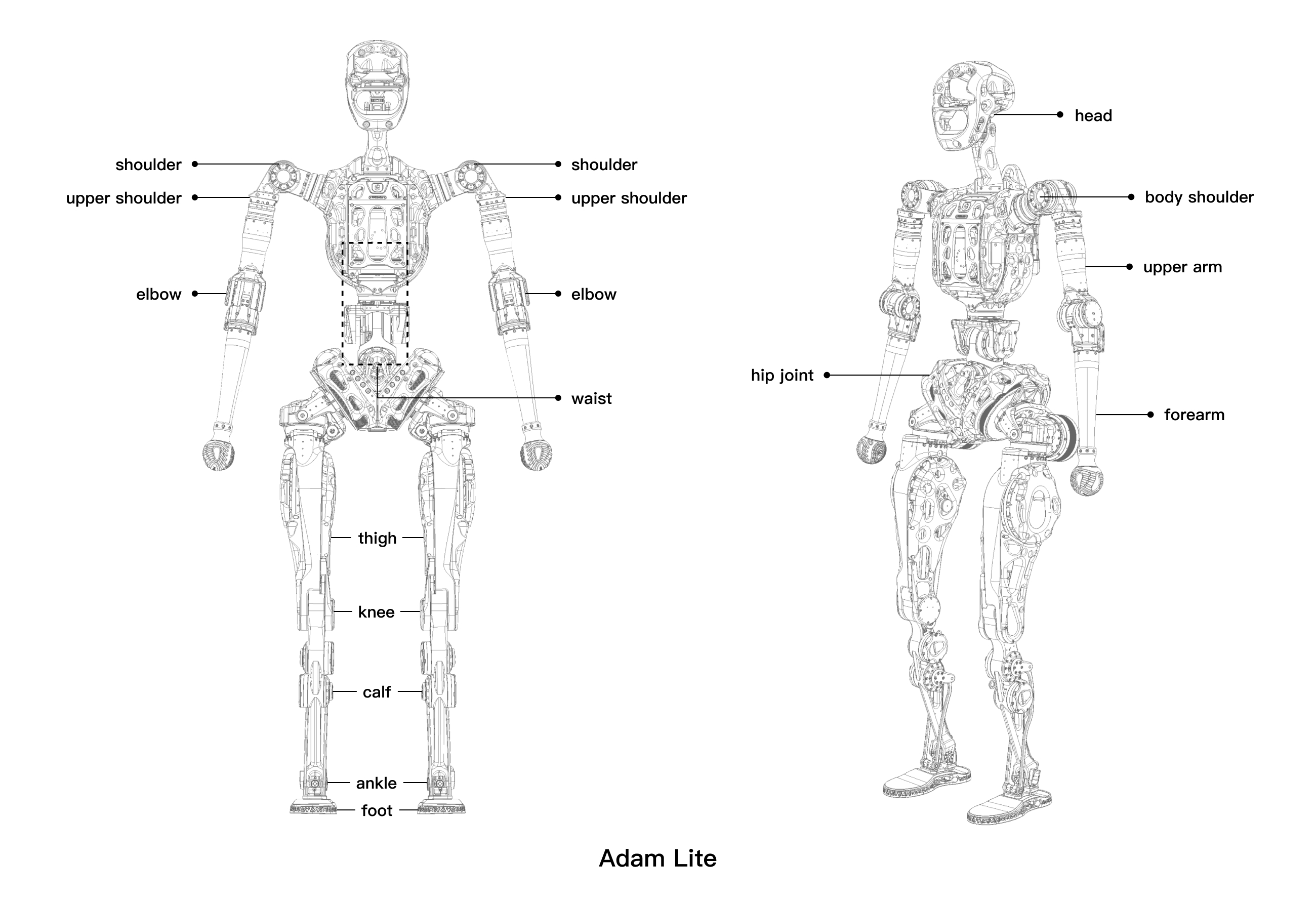
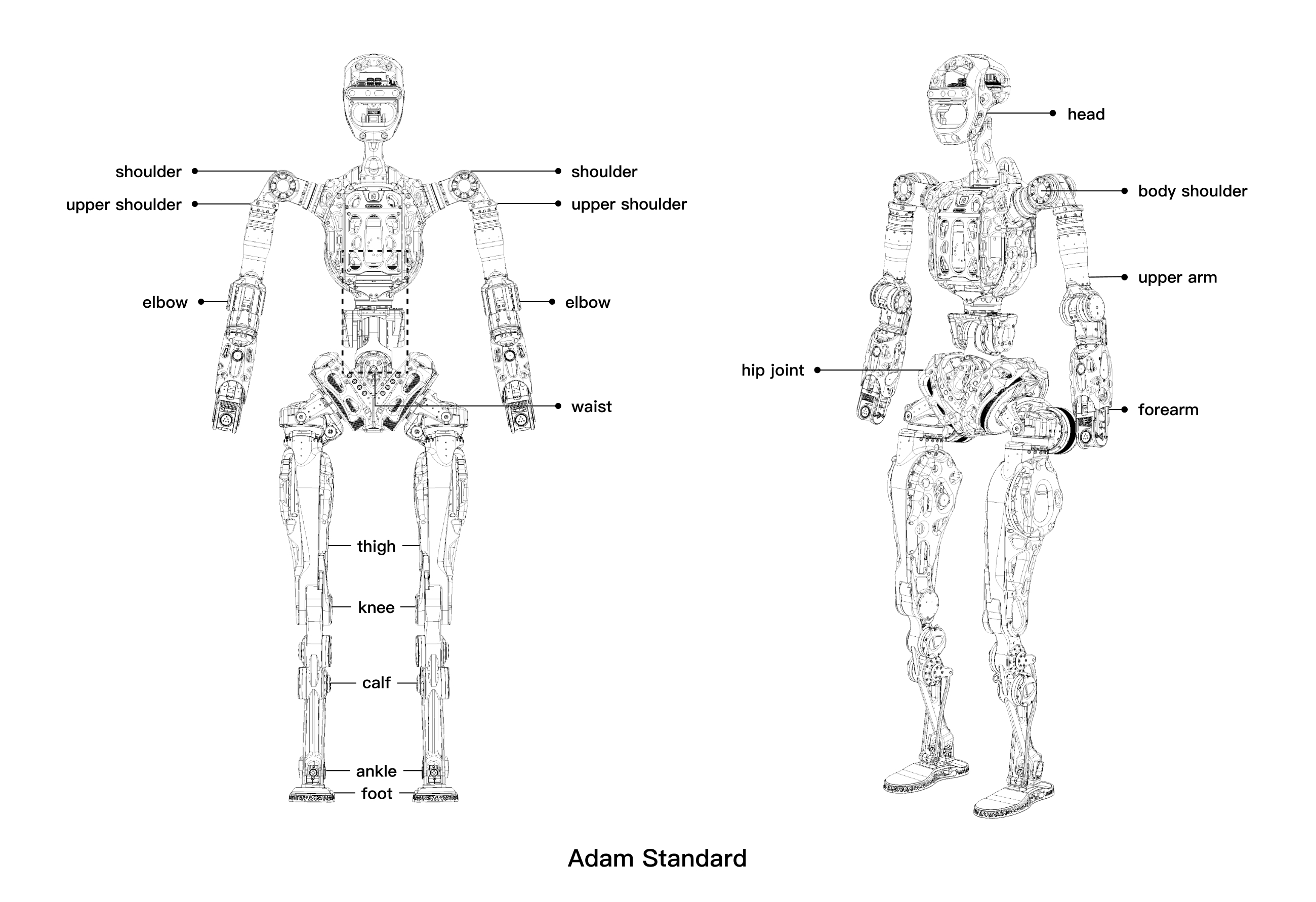
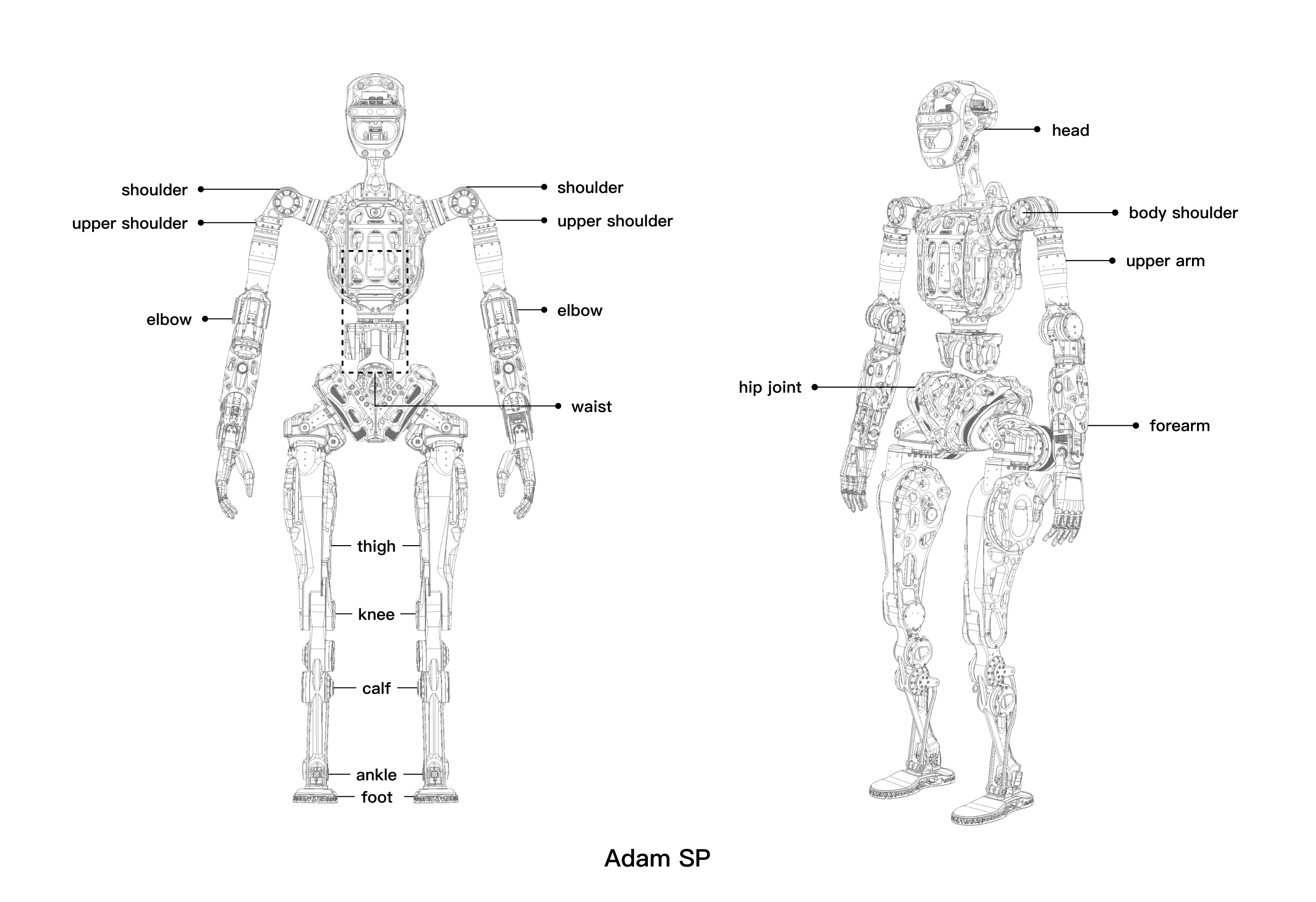
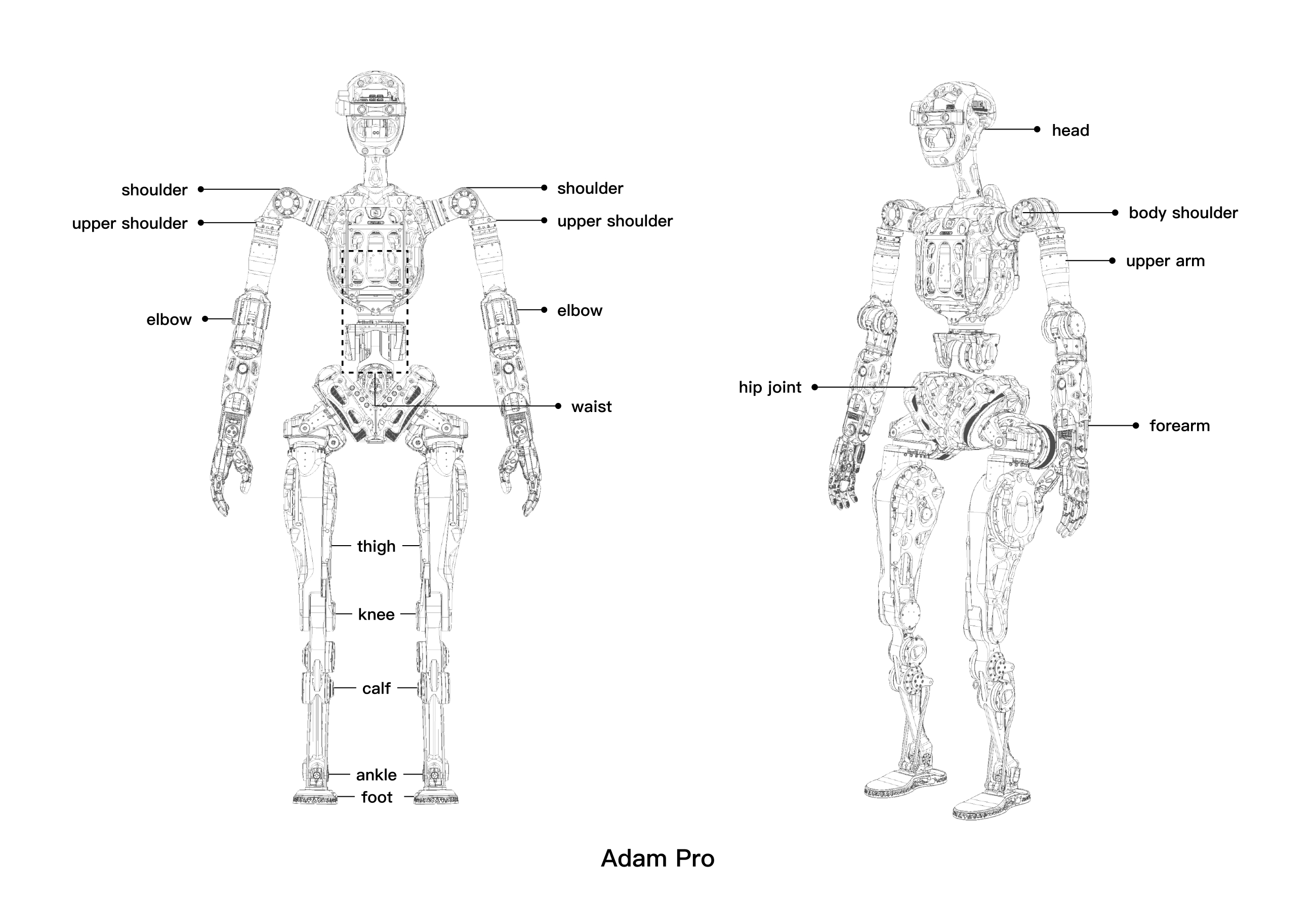
| Robot Model | Adam Lite | Adam Standard | Adam SP | Adam Pro |
|---|---|---|---|---|
| Body Size | 1.67m | 1.67m | 1.67m | 1.67m |
| Total Weight | 60kg | 61kg | 62kg | 63kg |
| Total Degrees of Freedom | 25 degrees of freedom | 29 degrees of freedom | 41 degrees of freedom | 43 degrees of freedom |
| Leg Degrees of Freedom | Hip x3 + Knee x1 + Ankle x2 = 6 | Hip x3 + Knee x1 + Ankle x2 = 6 | Hip x3 + Knee x1 + Ankle x2 = 6 | Hip x3 + Knee x1 + Ankle x2 = 6 |
| Arm Degrees of Freedom | Shoulder x3 + Elbow x1 + Forearm x1 = 5 | Shoulder x3 + Elbow x1 + Forearm x1 + Wrist x2 = 7 | Shoulder x3 + Elbow x1 + Forearm x1 + Wrist x2 + Dexterous Fingers x6 = 13 | Shoulder x3 + Elbow x1 + Forearm x1 + Wrist x2 + Dexterous Fingers x6 = 13 |
| Waist Degrees of Freedom | 3 degrees of freedom | 3 degrees of freedom | 3 degrees of freedom | 3 degrees of freedom |
| Joint Torque Limits | Knee ~ 340N·m, Hip ~ 340N·m, Ankle ~ 46N·m, Arm ~ 60N·m | Knee ~ 340N·m, Hip ~ 340N·m, Ankle ~ 46N·m, Arm ~ 60N·m | Knee ~ 340N·m, Hip ~ 340N·m, Ankle ~ 46N·m, Arm ~ 60N·m | Knee ~ 340N·m, Hip ~ 340N·m, Ankle ~ 46N·m, Arm ~ 60N·m |
| Walking Speed | Max 1.5m/s | Max 1.5m/s | Max 1.5m/s | Max 1.5m/s |
| Battery | 1172W·h capacity, 46.2V max voltage, 25A max output current | 1172W·h capacity, 46.2V max voltage, 25A max output current | 1172W·h capacity, 46.2V max voltage, 25A max output current | 1172W·h capacity, 46.2V max voltage, 25A max output current |
| Communication | Wi-Fi 6, Bluetooth 5.0, easy remote real-time control and debugging | Wi-Fi 6, Bluetooth 5.0, easy remote real-time control and debugging | Wi-Fi 6, Bluetooth 5.0, easy remote real-time control and debugging | Wi-Fi 6, Bluetooth 5.0, easy remote real-time control and debugging |
| Control & Perception Computing | Robust self-developed WBC (Whole Body Control) + MPC (Model Predictive Control) algorithms for dynamic balance | Robust self-developed WBC (Whole Body Control) + MPC (Model Predictive Control) algorithms for dynamic balance | Robust self-developed WBC (Whole Body Control) + MPC (Model Predictive Control) algorithms for dynamic balance | Robust self-developed WBC (Whole Body Control) + MPC (Model Predictive Control) algorithms for dynamic balance |
| Motion Control Computer | NUC12WSKi7 for motion control | NUC12WSKi7 for motion control | NUC12WSKi7 for motion control | NUC12WSKi7 for motion control |
| Perception & AI Computer | / | NVIDIA Jetson Orin NX 16GB embedded computer for AI, vision, and decision making | NVIDIA Jetson Orin NX 16GB embedded computer for AI, vision, and decision making | NVIDIA Jetson Orin NX 16GB embedded computer for AI, vision, and decision making |
| Perception Sensors | / | Intel Realsense D455 depth camera | Intel Realsense D455 depth camera | ZED MINI |
| Head | / | ✓ | ✓ | 2 degrees of freedom |
| Hand | Spherical Hand | / | Dexterous Hand | Dexterous Hand |
🧍♂️ Appearance Overview
🧩 Key Components
⚙️ Hardware Architecture
🧠 Control & Compute Modules
🧮 Motion Control Unit (Cerebellum)
| Parameter | Specification |
|---|---|
| Model | NUC12WSKi7 |
| CPU | 12th Gen Intel Core i7-1260P |
| Cores | 12 cores |
| Threads | 16 threads |
| Max Turbo Frequency | 4.7GHz |
| RAM | 16GB |
| RAM Type | DDR4 3200M Hz |
| Cache | 18MB |
| Storage | 128GB |
| GPU | Intel® Iris® Xe Graphics |
| Max Dynamic GPU Frequency | 1.40 GHz |
| Intel® Deep Learning Boost | Yes |
| Intel® Adaptix™ Technology | Yes |
| Intel® Hyper-Threading Technology | Yes |
| Instruction Set | 64bit |
🧬 Perception & Decision Unit (Brain)
| Parameter | Specification |
|---|---|
| Model | NVIDIA Jetson Orin NX 16GB |
| AI Performance | 100 TOPS |
| GPU | 32 Tensor Cores, 1024-core NVIDIA Ampere architecture GPU |
| CPU | 8-core Arm CortexA78AE v8.2 64-bit CPU 2MB L2 + 4MB L3 |
| Memory | 16GB 128-bit LPDDR5, 102.4GB/s |
| Storage | 128GB M.2 SSD |
| Video Encoding | 1x 4K60 (H.265), 3x 4K30 (H.265), 6x 1080p60 (H.265), 12x 1080p30 (H.265) |
| Video Decoding | 1x 8K30 (H.265), 2x 4K60 (H.265), 4x 4K30 (H.265), 9x 1080p60 (H.265), 18x 1080p30 (H.265) |
| Camera | 2x MIPI CSI-2 D-PHY channels |
| USB | 4x USB 3.2, 1x USB Type-C |
| Display Interface | 1x DisplayPort |
| Networking | Gigabit Ethernet |
| Other I/O | 40-pin header (UART, SPI, I2S, I2C, PWM, GPIO), 4-pin fan header, DC power socket |
| Size | 103x90x34 (mm) |
🔩 Joint Parameters
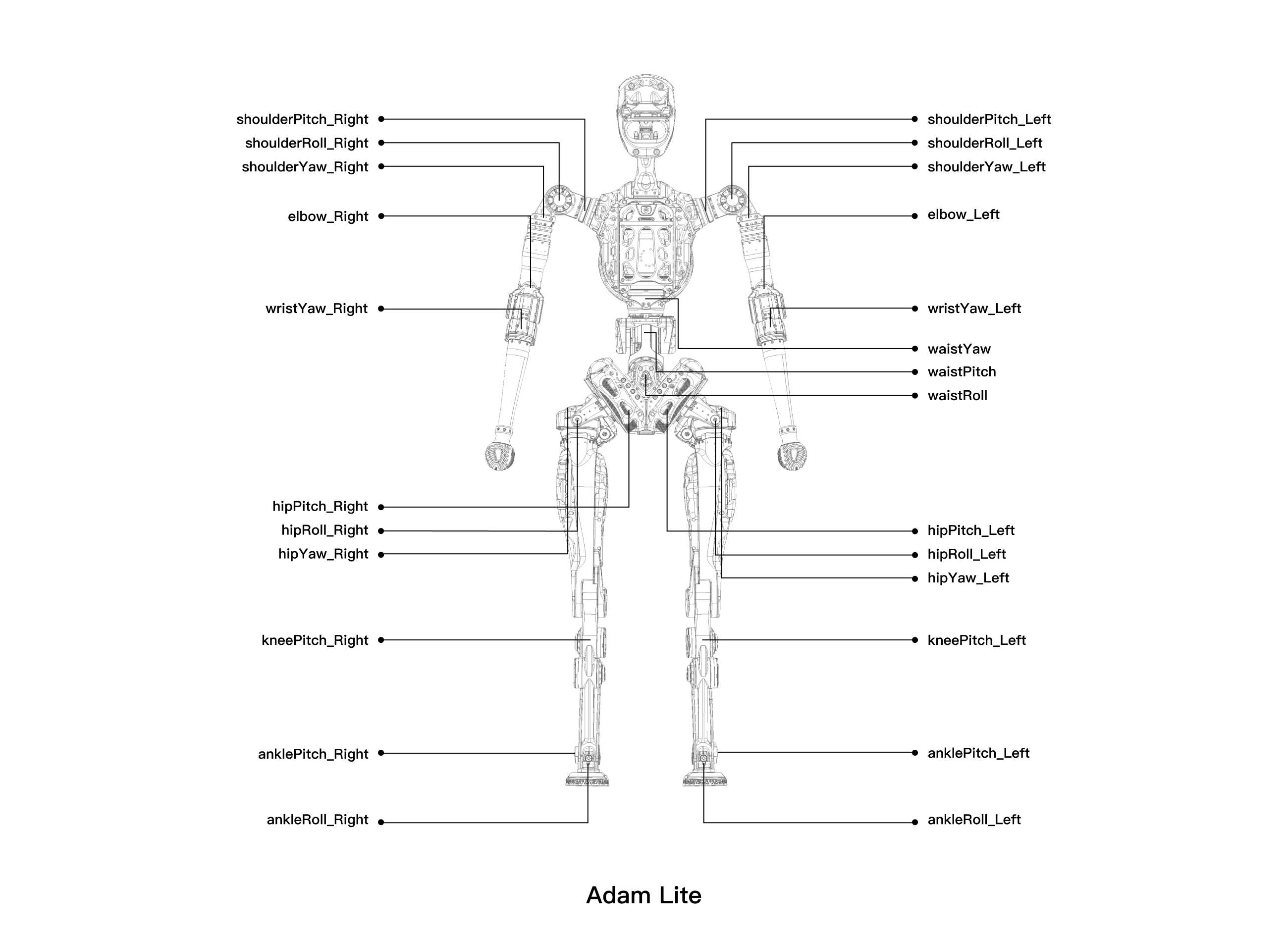
🤖 Adam Lite
| Joint Name | Actuator Model | Limit (rad) | Notes |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420~-3.6138 | Positive for backward, negative for forward |
| shoulderRoll_Left/Right | PND-50-14A-50-S | Left: +3.1416~-0.6283 Right: +0.6283~-3.1416 |
Left: Positive outward, negative inward Right: Positive inward, negative outward |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094~-2.4958 | Positive for backward, negative for forward |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | |
| waistRoll | PND-60-17-50-S | ±0.2793 | |
| waistPitch | PND-60-17-50-S | +1.3614~-0.8378 | Positive for forward, negative for backward |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hipPitch_Left/Right | PND-130A-7F-7-P | ±2.2276 | |
| hipRoll_Left/Right | PND-80-20-50-S | +1.6581~-0.7854 | Positive outward, negative inward |
| hipYaw_Left/Right | PND-60-17-30-S | ±0.8290 | |
| kneePitch_Left/Right | PND-130-7F-P | +2.4435~0.0000 | |
| anklePitch_Left/Right | PND-50-6F5S-P | +0.4276~-1.0472 | Two joints linked, toe-down is negative, reverse is positive |
| ankleRoll_Left/Right | PND-50-6F5S-P | ±0.4887 | Two joints linked |
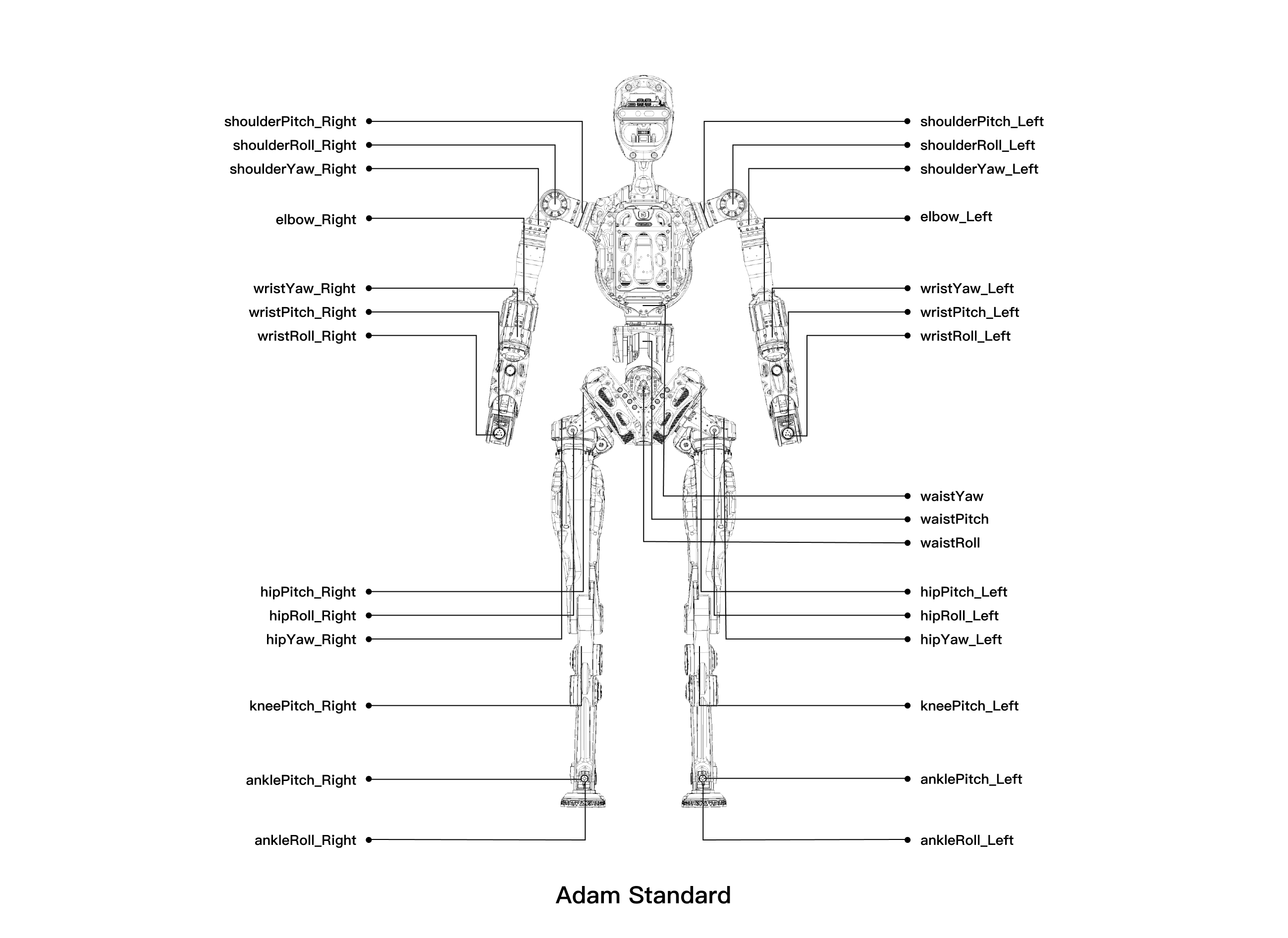
🤖 Adam Standard
| Joint Name | Actuator Model | Limit (rad) | Notes |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420~-3.6138 | Positive for backward, negative for forward |
| shoulderRoll_Left/Right | PND-50-14A-50-S | Left: +2.7925~-0.6283 Right: +0.6283~-2.7925 |
Left: Positive outward, negative inward Right: Positive inward, negative outward |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094~-2.4958 | Positive for backward, negative for forward |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | |
| wristPitch_Left/Right | PND-20-08-50-S | ±0.9599 | Two joints linked, spherical joint range of motion |
| wristRoll_Left/Right | PND-20-08-50-S | ±0.9599 | Two joints linked, spherical joint range of motion |
| waistRoll | PND-60-17-50-S | ±0.2793 | |
| waistPitch | PND-60-17-50-S | +1.3614~-0.8378 | Positive for forward, negative for backward |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hipPitch_Left/Right | PND-130A-7F-7-P | ±2.2276 | |
| hipRoll_Left/Right | PND-80-20-50-S | +1.6581~-0.7854 | Positive outward, negative inward |
| hipYaw_Left/Right | PND-60-17-30-S | ±0.8290 | |
| kneePitch_Left/Right | PND-130-7F-P | +2.4435~0.0000 | |
| anklePitch_Left/Right | PND-50-6F5S-P | +0.4276~-1.0472 | Two joints linked, toe-down is negative, reverse is positive |
| ankleRoll_Left/Right | PND-50-6F5S-P | ±0.4887 | Two joints linked |
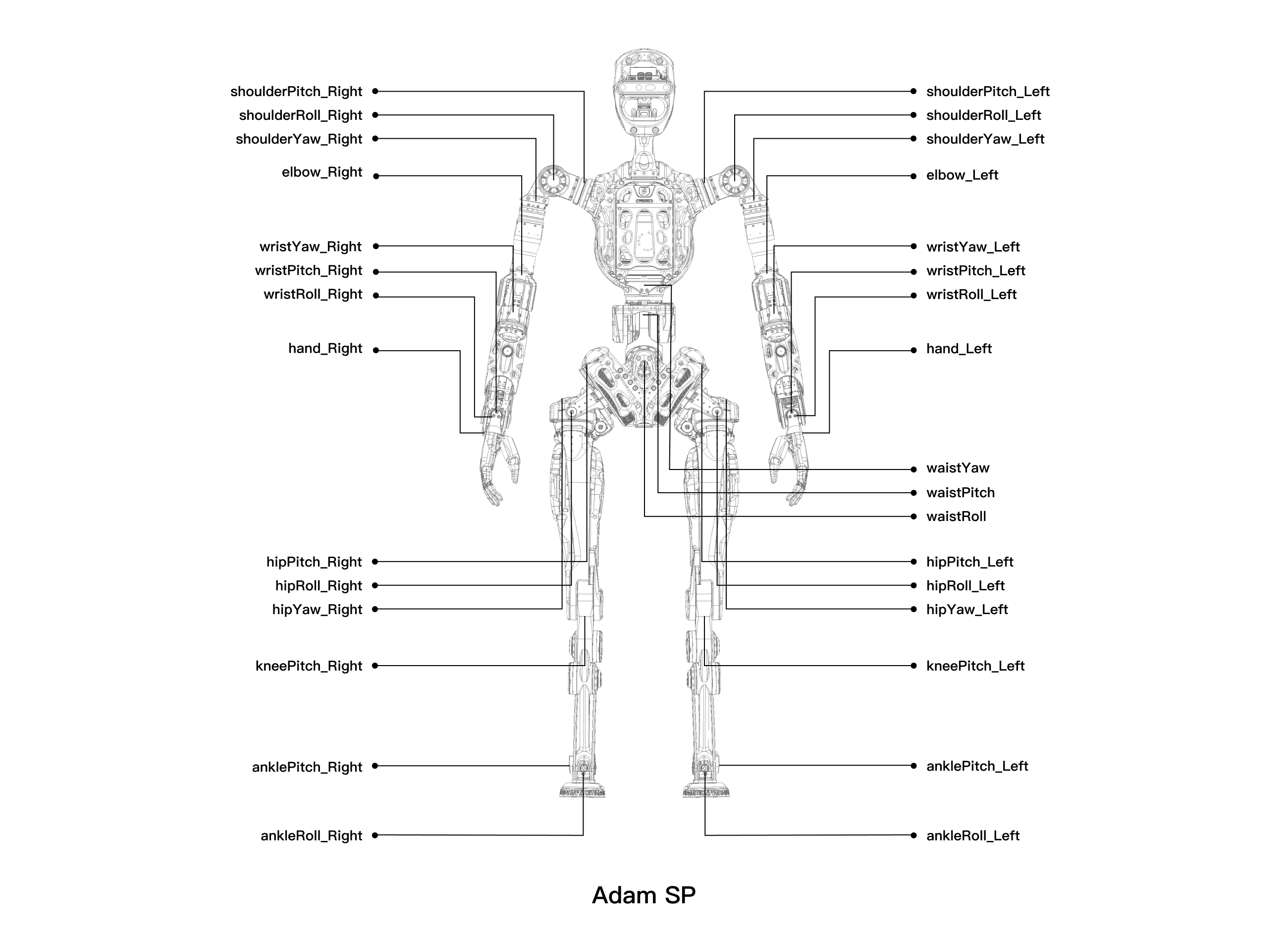
🤖 Adam SP
| Joint Name | Actuator Model | Limit (rad) | Notes |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420~-3.6138 | Positive for backward, negative for forward |
| shoulderRoll_Left/Right | PND-50-14A-50-S | Left: +2.7925~-0.6283 Right: +0.6283~-2.7925 |
Left: Positive outward, negative inward Right: Positive inward, negative outward |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094~-2.4958 | Positive for backward, negative for forward |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | |
| wristPitch_Left/Right | PND-20-08-50-S | ±0.9599 | Two joints linked, spherical joint range of motion |
| wristRoll_Left/Right | PND-20-08-50-S | ±0.9599 | Two joints linked, spherical joint range of motion |
| waistRoll | PND-60-17-50-S | ±0.2793 | |
| waistPitch | PND-60-17-50-S | +1.3614~-0.8378 | Positive for forward, negative for backward |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hipPitch_Left/Right | PND-130A-7F-7-P | ±2.2276 | |
| hipRoll_Left/Right | PND-80-20-50-S | +1.6581~-0.7854 | Positive outward, negative inward |
| hipYaw_Left/Right | PND-60-17-30-S | ±0.8290 | |
| kneePitch_Left/Right | PND-130-7F-P | +2.4435~0.0000 | |
| anklePitch_Left/Right | PND-50-6F5S-P | +0.4276~-1.0472 | Two joints linked, toe-down is negative, reverse is positive |
| ankleRoll_Left/Right | PND-50-6F5S-P | ±0.4887 | Two joints linked |
| hand_Left/Right | / | / | Dexterous hand joint |
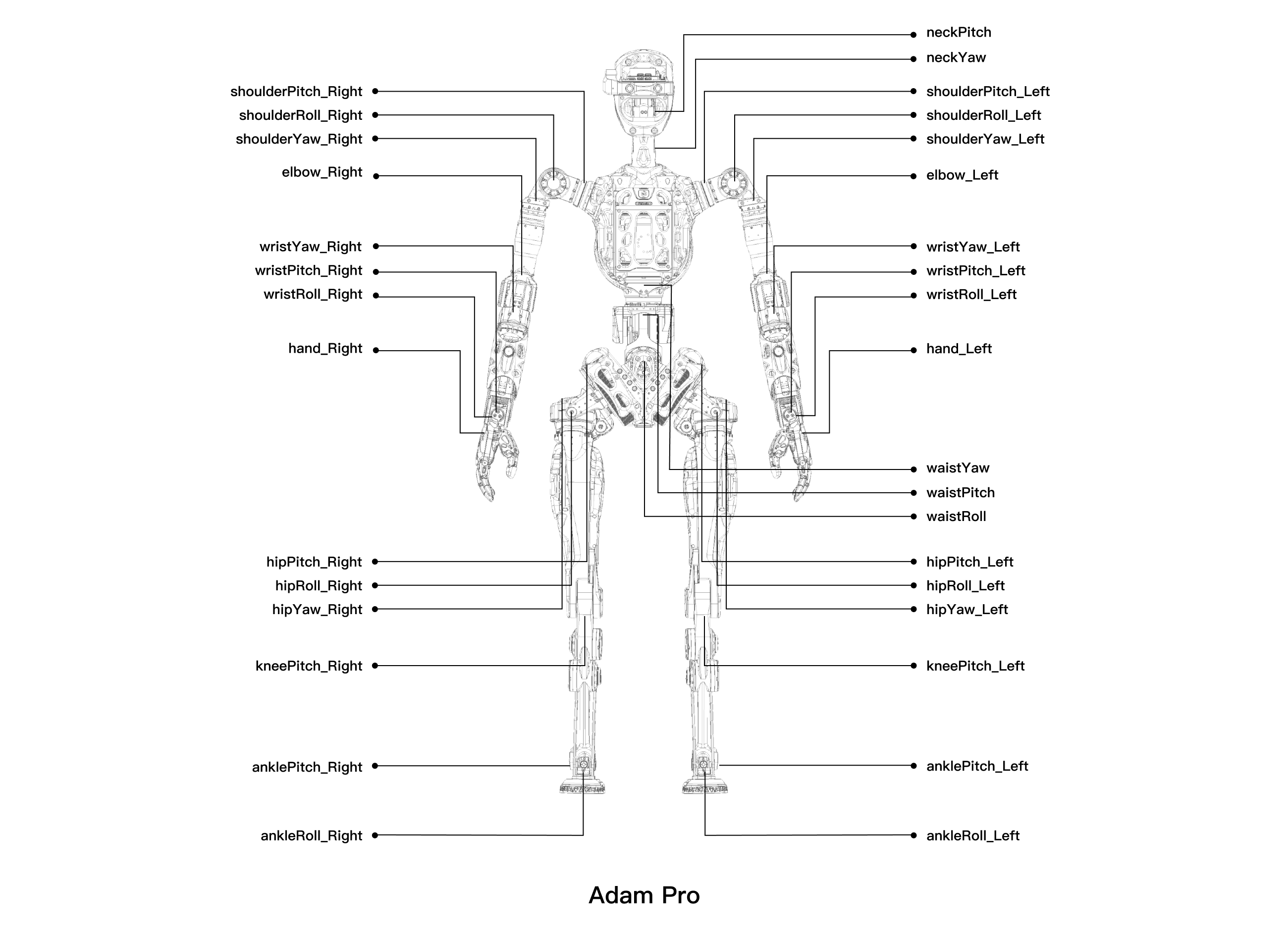
🤖 Adam Pro
| Joint Name | Actuator Model | Limit (rad) | Notes |
|---|---|---|---|
| shoulderPitch_Left/Right | PND-50-14A-50-S | +2.0420~-3.6138 | Positive for backward, negative for forward |
| shoulderRoll_Left/Right | PND-50-14A-50-S | Left: +2.7925~-0.6283 Right: +0.6283~-2.7925 |
Left: Positive outward, negative inward Right: Positive inward, negative outward |
| shoulderYaw_Left/Right | PND-30-14A-50-S | ±2.5831 | |
| elbow_Left/Right | PND-30-14A-50-S | +0.2094~-2.4958 | Positive for backward, negative for forward |
| wristYaw_Left/Right | PND-20-14A-50-S | ±2.6704 | |
| wristPitch_Left/Right | PND-20-08-50-S | ±0.9599 | Two joints linked, spherical joint range of motion |
| wristRoll_Left/Right | PND-20-08-50-S | ±0.9599 | Two joints linked, spherical joint range of motion |
| waistRoll | PND-60-17-50-S | ±0.2793 | |
| waistPitch | PND-60-17-50-S | +1.3614~-0.8378 | Positive for forward, negative for backward |
| waistYaw | PND-60-17-50-S | ±0.8290 | |
| hipPitch_Left/Right | PND-130A-7F-7-P | ±2.2276 | |
| hipRoll_Left/Right | PND-80-20-50-S | +1.6581~-0.7854 | Positive outward, negative inward |
| hipYaw_Left/Right | PND-60-17-30-S | ±0.8290 | |
| kneePitch_Left/Right | PND-130-7F-P | +2.4435~0.0000 | |
| anklePitch_Left/Right | PND-50-6F5S-P | +0.4276~-1.0472 | Two joints linked, toe-down is negative, reverse is positive |
| ankleRoll_Left/Right | PND-50-6F5S-P | ±0.4887 | Two joints linked |
| hand_Left/Right | / | / | Dexterous hand joint |
| neckYaw | PND-60-17-50-S | ±1.0472 | Neck yaw joint |
| neckPitch | PND-60-17-50-S | ±1.0472 | Neck pitch joint |
✋ PND Dexterous Hand
| Joint Name | Limit (rad) | Notes |
|---|---|---|
| Thumb1_Left/Right | 0.0873 ~ 1.5708 | Abduction |
| Thumb2_Left/Right | 0.4538 ~ 1.0821 | Flexion |
| Index_Left/Right | 0 ~ 1.5533 | Flexion |
| Middle_Left/Right | 0 ~ 1.5533 | Flexion |
| Ring_Left/Right | 0 ~ 1.5533 | Flexion |
| Pinky_Left/Right | 0 ~ 1.5533 | Flexion |
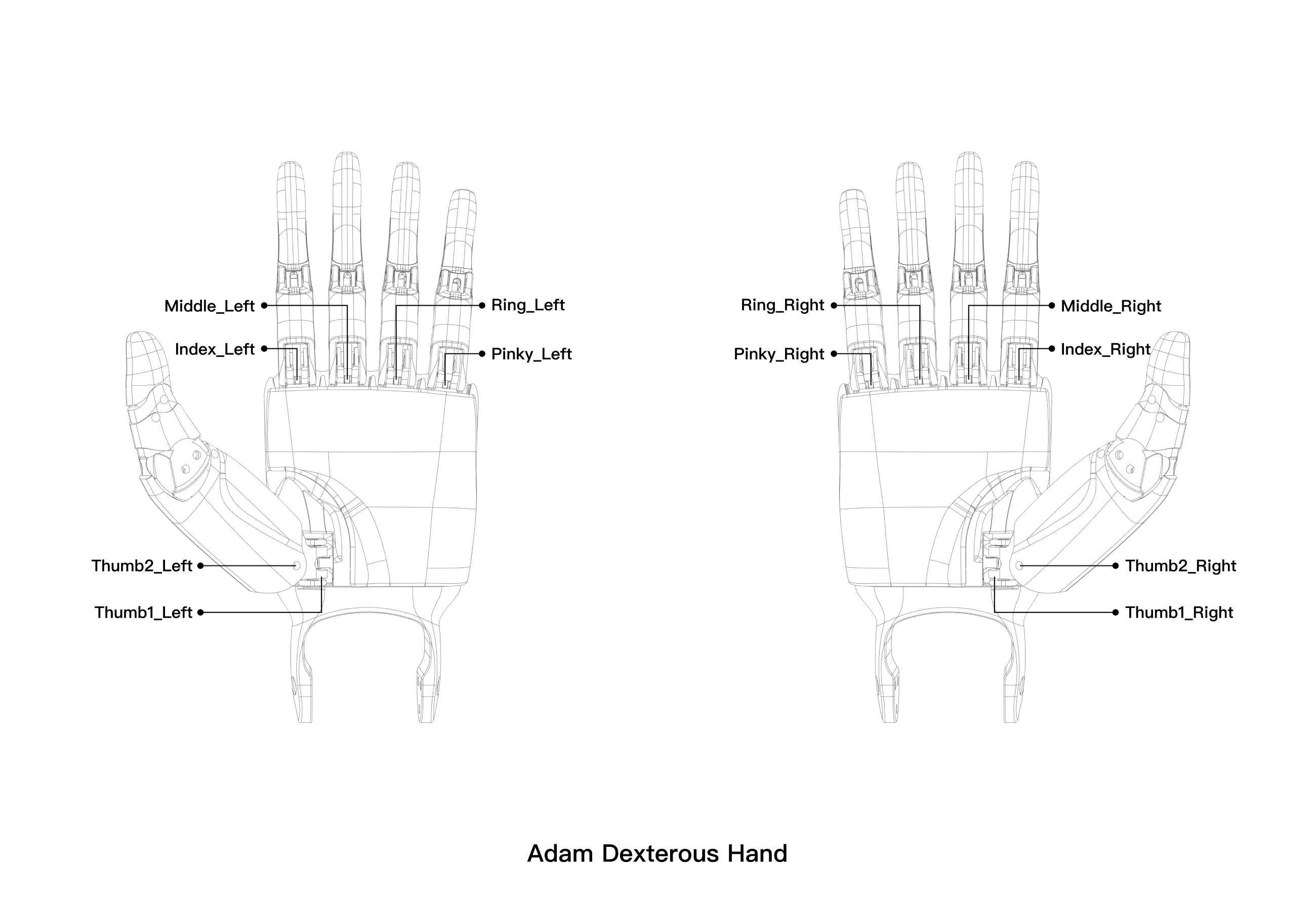
The finger joints adopt a linear control mapping:
A control value of 0 corresponds to the joint being at the fully open position (i.e., the lower angle limit).
A control value of 1000 corresponds to the joint being at the fully closed position (i.e., the upper angle limit).
Last Updated: 2025-12-03