Coordinate System
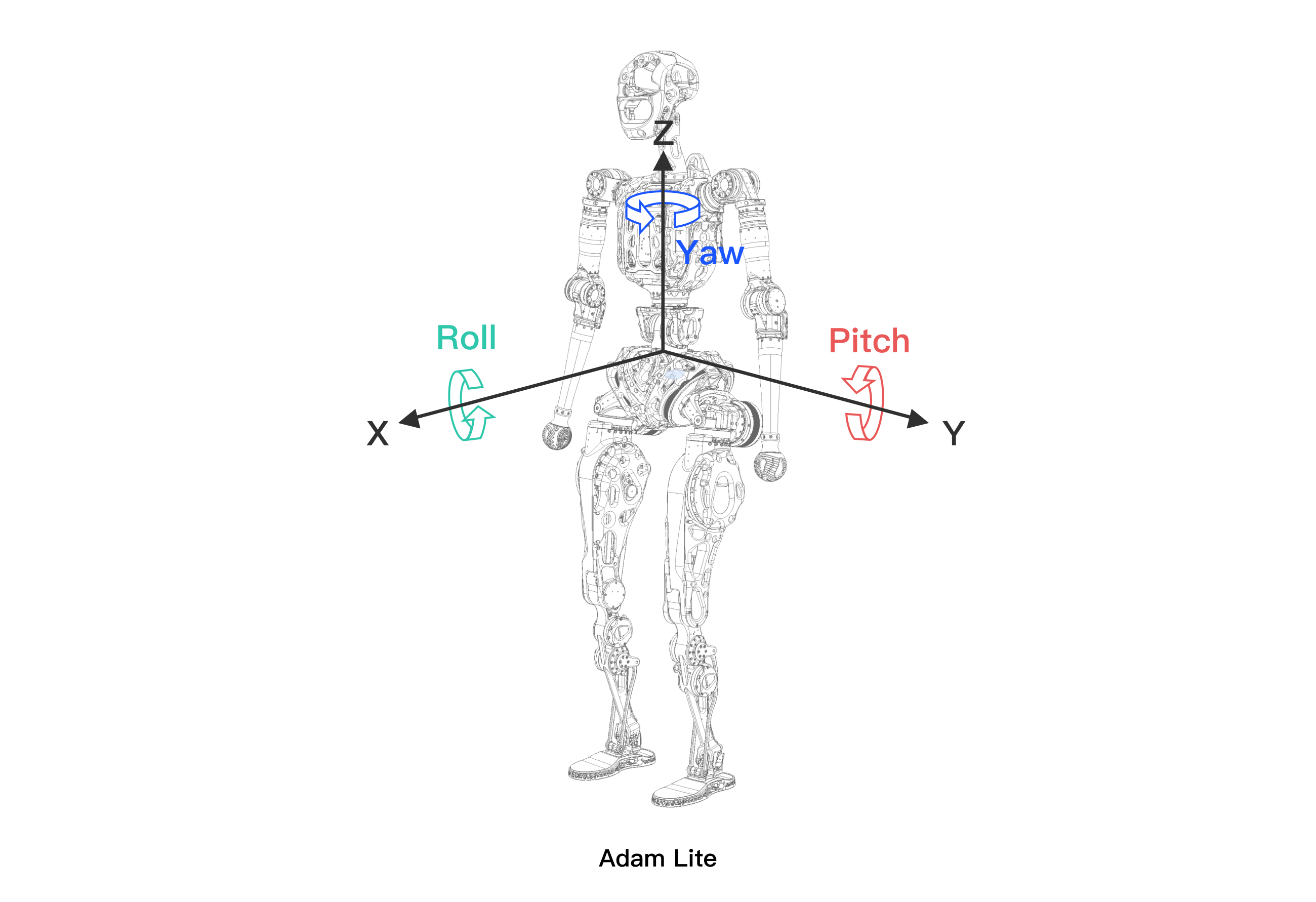
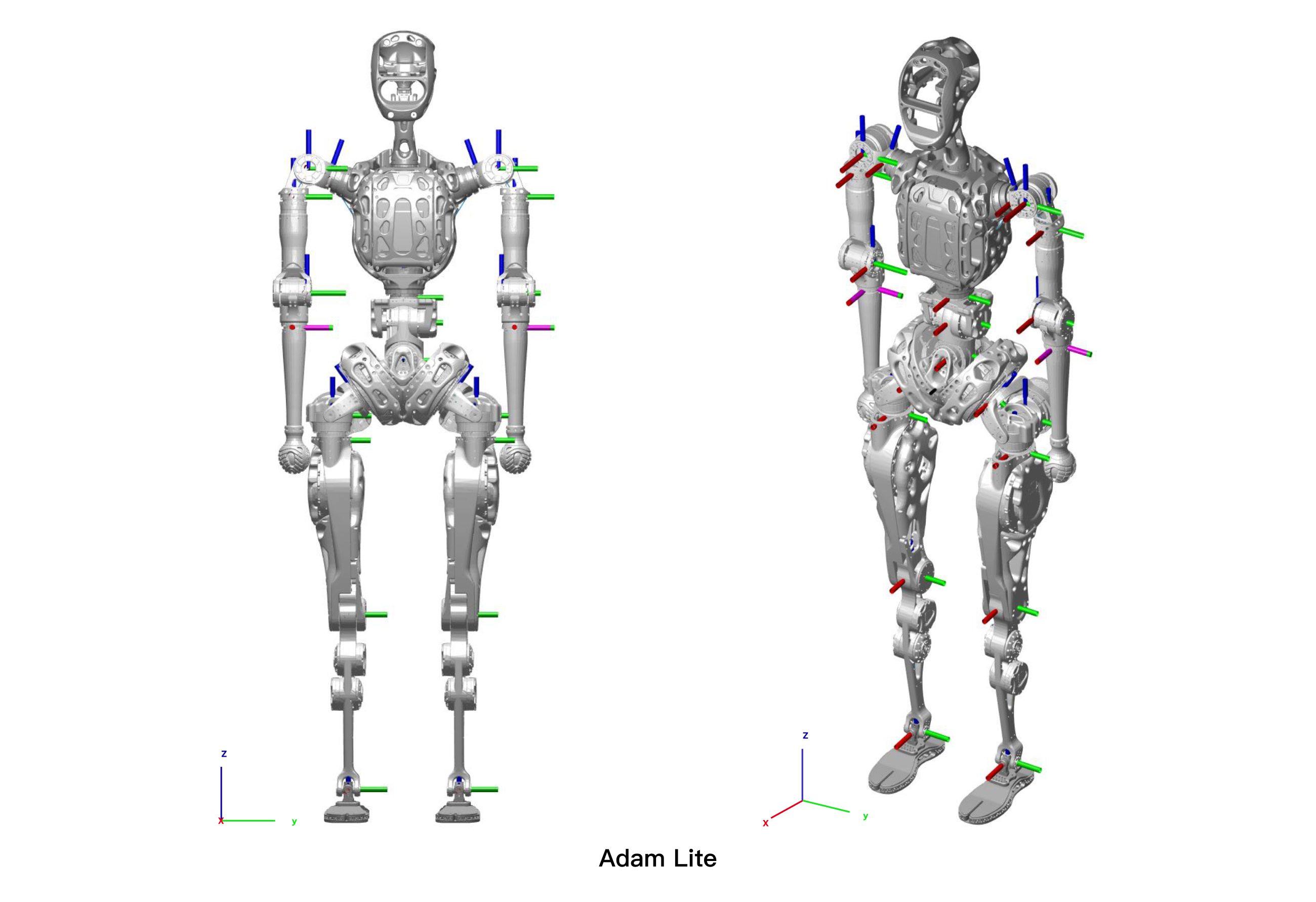
Adam Lite
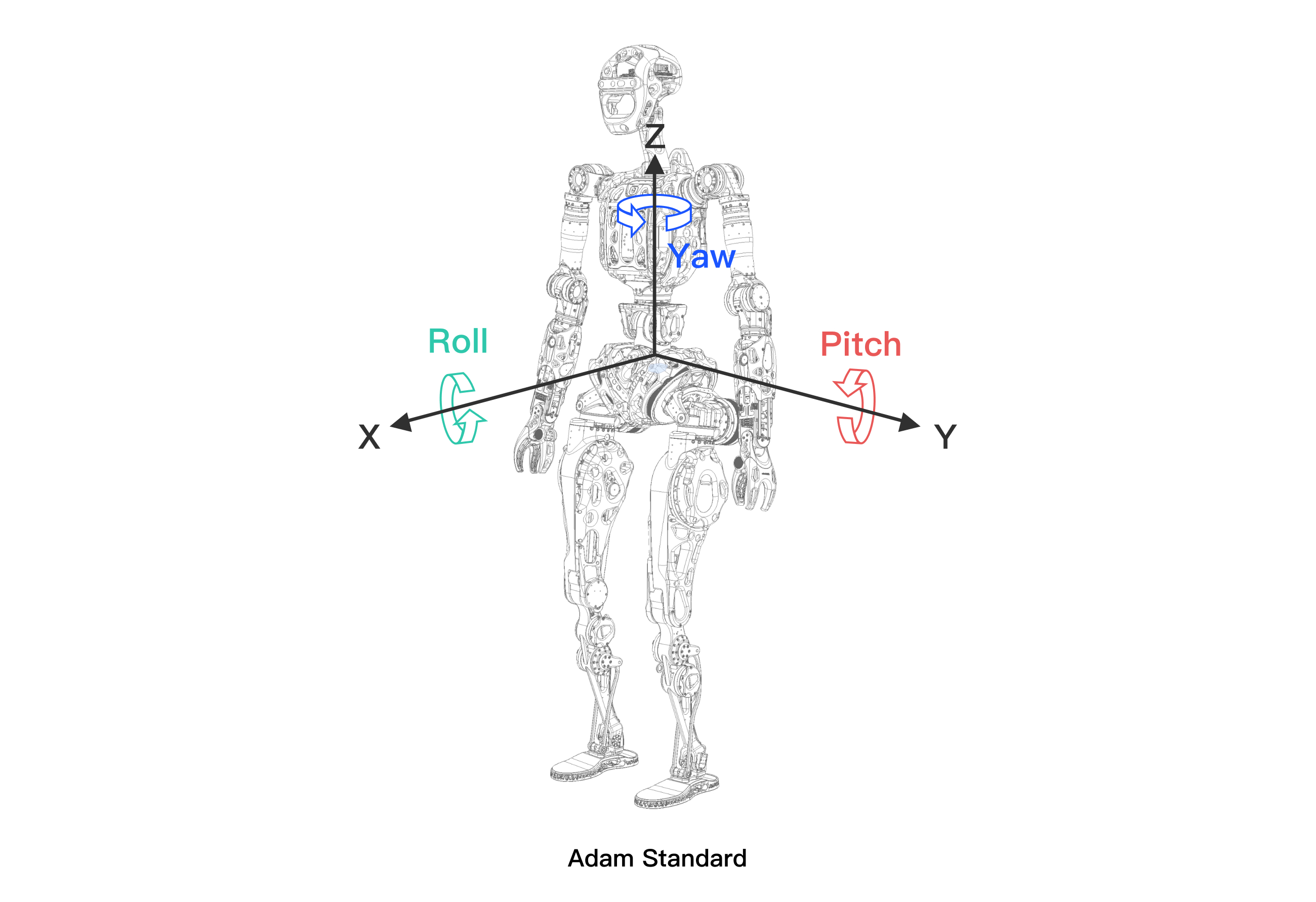
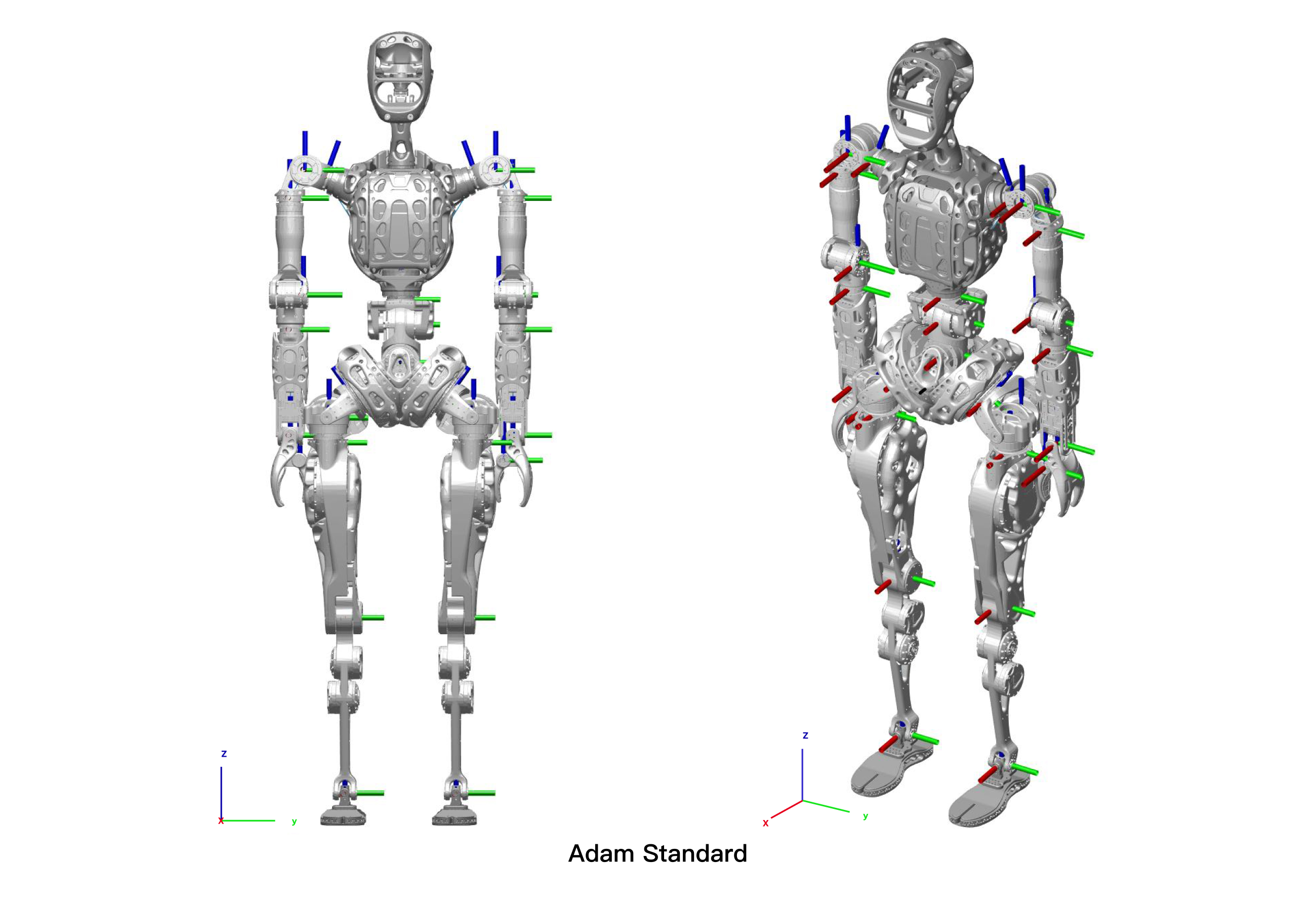
Adam Standard
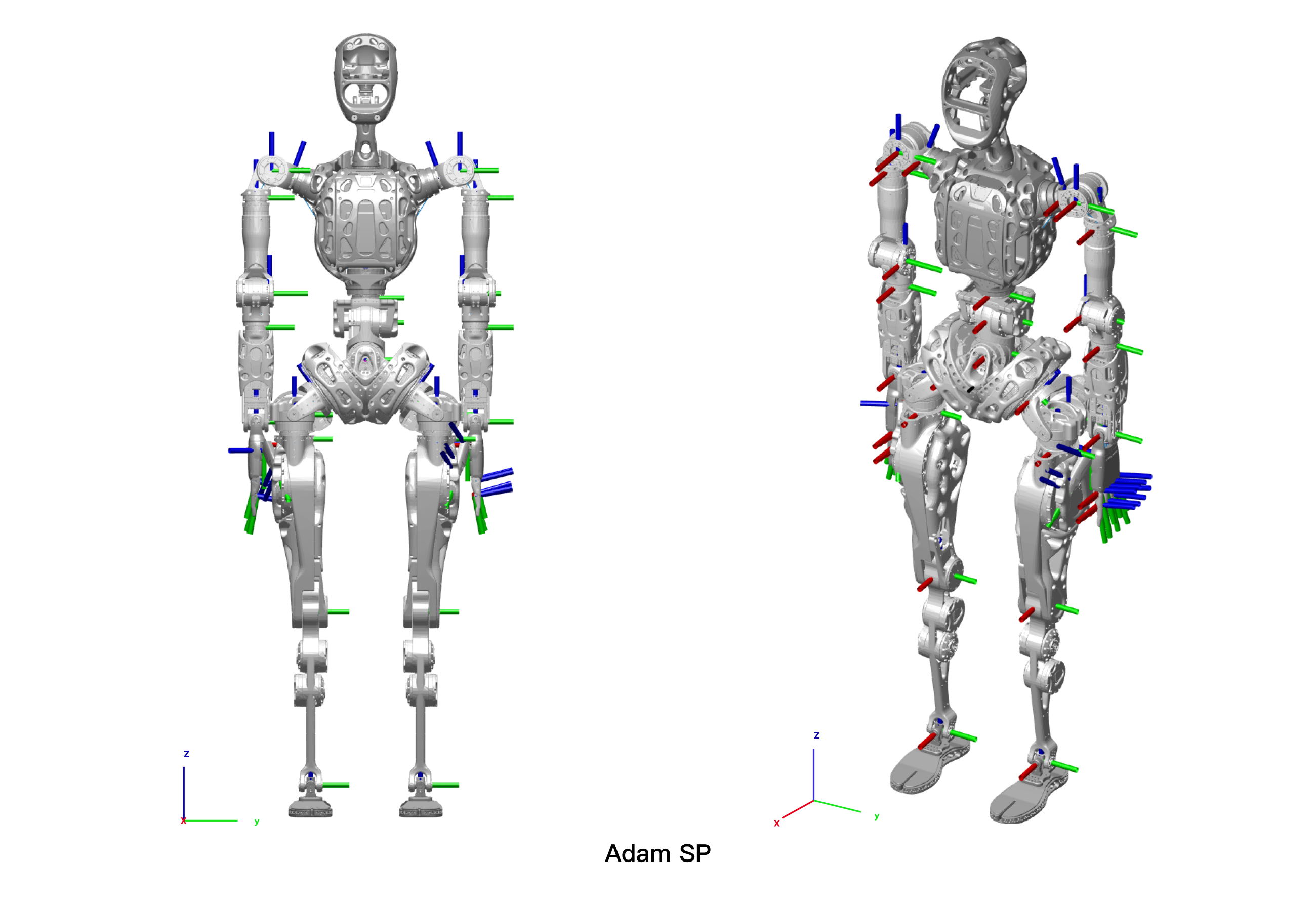
Adam SP
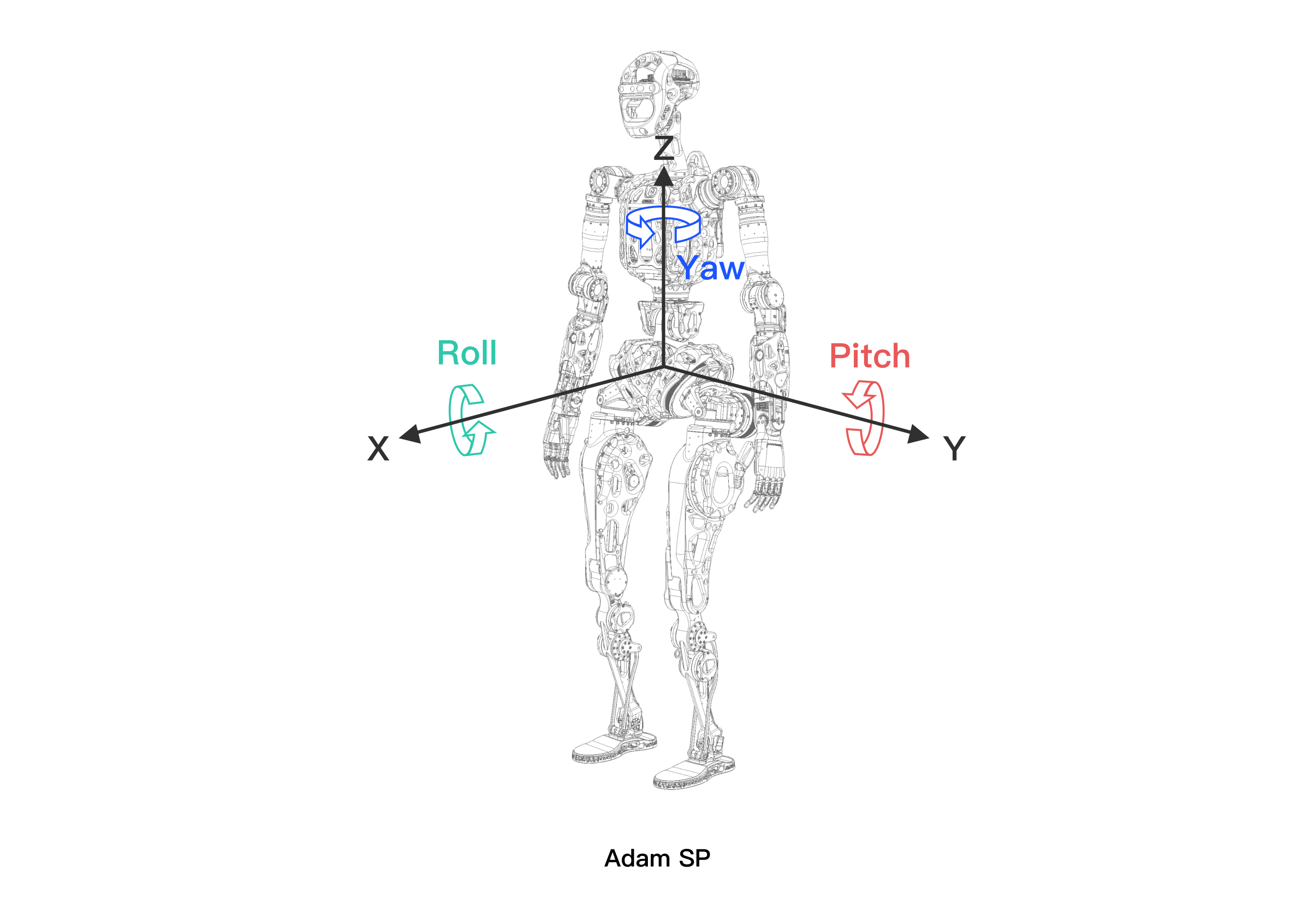
Coordinate system, joint rotation axis and joint zero point
When each joint is at zero degrees, the coordinate systems are as follows. Red is the x-axis, green is the y-axis, and blue is the z-axis.
Ankle Forward Kinematic
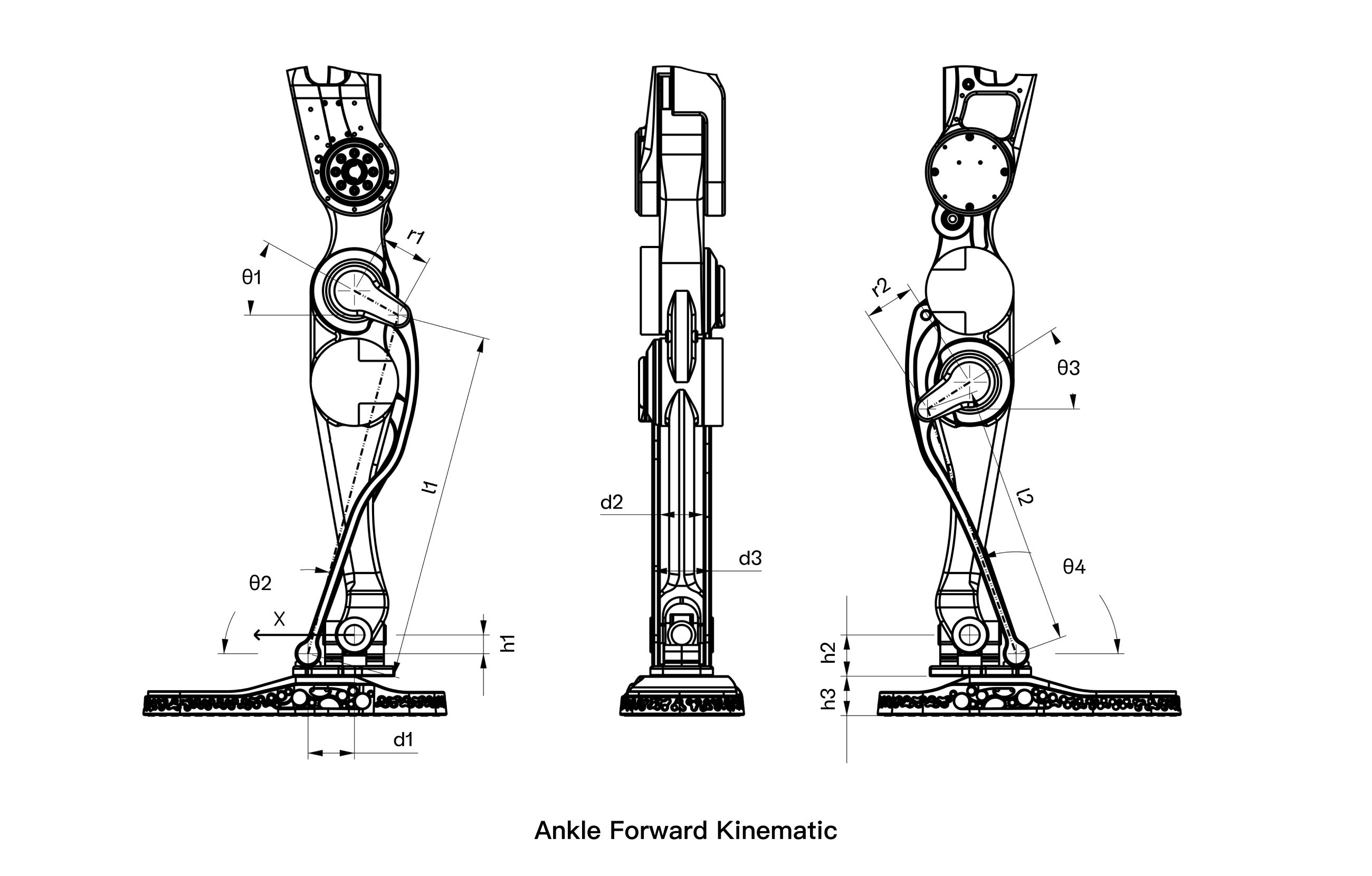
| Parameter Table | |||
|---|---|---|---|
| θ1 = 0.51 rad | r1 = 40.00mm | h1 = 15.00mm | d1 = 37.10mm |
| θ2 = 1.83 rad | r2 = 40.00mm | h2 = 33.00mm | d2 = 35.00mm |
| θ3 = 0.57 rad | l1 = 280.00mm | h3 = 31.50mm | d3 = 47.00mm |
| θ4 = 1.92 rad | l2 = 208.00mm |
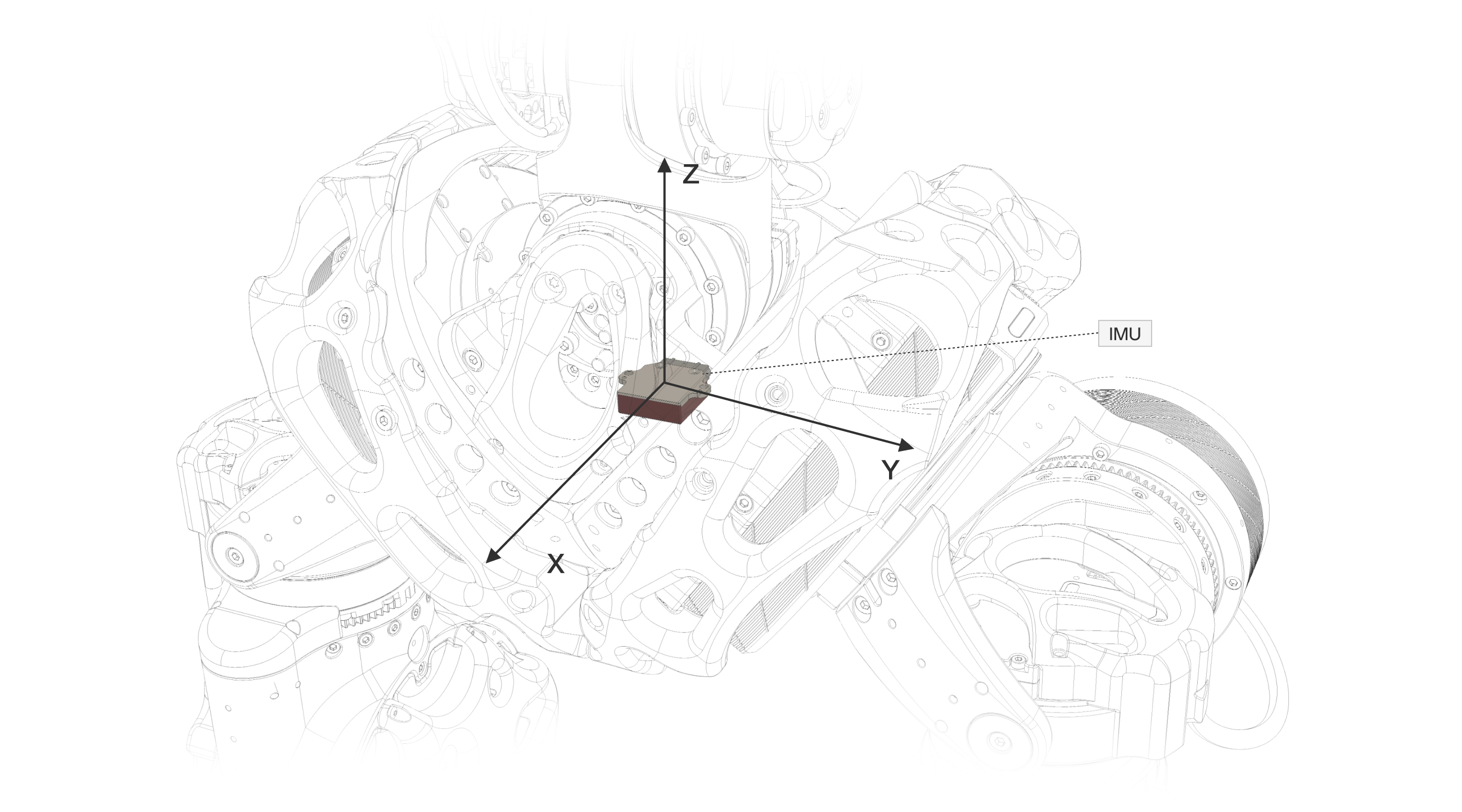
IMU Cordinate