🧠 强化学习
基于 Isaac Gym 仿真平台的强化学习训练流程示例
包括环境配置、依赖安装、训练与测试方法等步骤,使用户能够在 GPU 加速的物理仿真环境中构建并验证适用于 PND 机器人的运动控制策略。
🖥️ 硬件与系统要求
Isaac Gym 使用 GPU 加速仿真,建议配置如下:
| 项目 | 推荐配置 |
|---|---|
| 操作系统 | ≥ Ubuntu 20.04 x86_64(暂不支持 Mac/Windows) |
| 显卡 | NVIDIA RTX 系列(推荐显存 ≥ 8GB) |
| 驱动版本 | ≥ 525 |
| Python版本 | Python 3.8 |
| 支持型号 | Adam Lite |
🌍 环境与依赖
本章节介绍如何创建运行强化学习示例所需的虚拟环境,并安装 PyTorch、Isaac Gym、rsl_rl等依赖组件。
1. 创建虚拟环境(使用 Conda)
建议使用 Conda 创建独立虚拟环境,以避免依赖冲突。如果系统已安装Conda,可直接进入1.2 创建新环境。
1.1 安装 MiniConda(如尚未安装)
MiniConda 是 Conda 的轻量版,用于快速创建和管理 Python 环境。
mkdir -p ~/miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
初始化 Conda:
1.2 创建新环境
1.3 激活环境
2. 安装 PyTorch
PyTorch 用于神经网络训练与推理。
conda install pytorch==2.3.1 torchvision==0.18.1 torchaudio==2.3.1 pytorch-cuda=12.1 -c pytorch -c nvidia -y
3. 安装 Isaac Gym
Isaac Gym 是 NVIDIA 提供的 GPU 加速物理仿真平台,是本项目训练过程的核心。
3.1 下载并安装
下载Isaac Gym Preview 4仿真平台,解压后进入 python 目录安装:
3.2 验证
运行示例:
若弹出模拟窗口并正常显示 1080 颗球下落,则安装成功。
如遇问题,可参考 isaacgym/docs/index.html。
4. 安装 rsl_rl
rsl_rl 是 leggedrobotics 提供的强化学习算法库(如 PPO)。
git clone https://github.com/leggedrobotics/rsl_rl.git
cd rsl_rl
git checkout v1.0.2
pip install -e .
🏋️ 模型训练使用
1. 下载PND官方示例代码
pnd_rl_gym 是 PND 的 RL 训练工程,包含环境、配置和训练脚本。
1.1 下载
1.2 安装
2. 激活环境
3. 开始训练
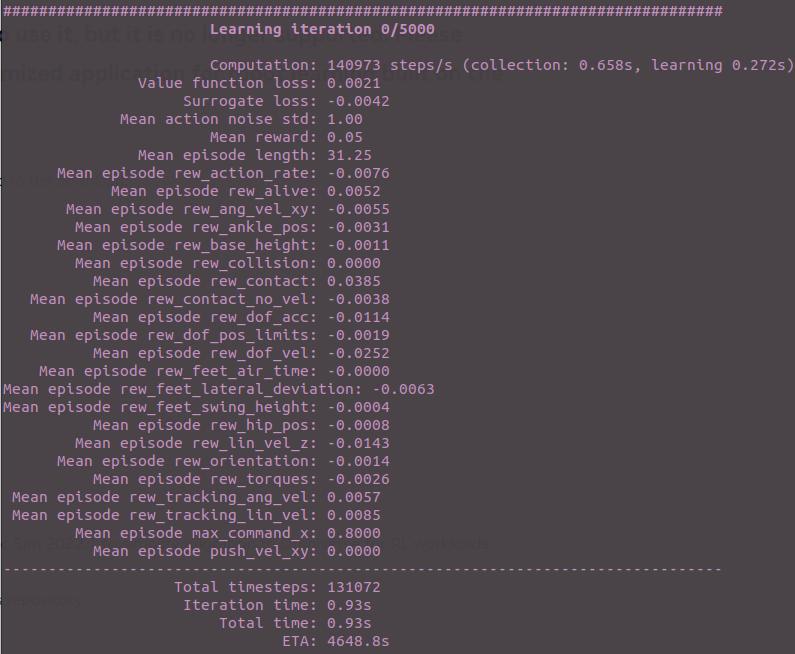
终端返回如上命表示启动成功
4. 执行测试

📚 致谢与引用
最后更新:2025-11-26