Skip to content
Wiki
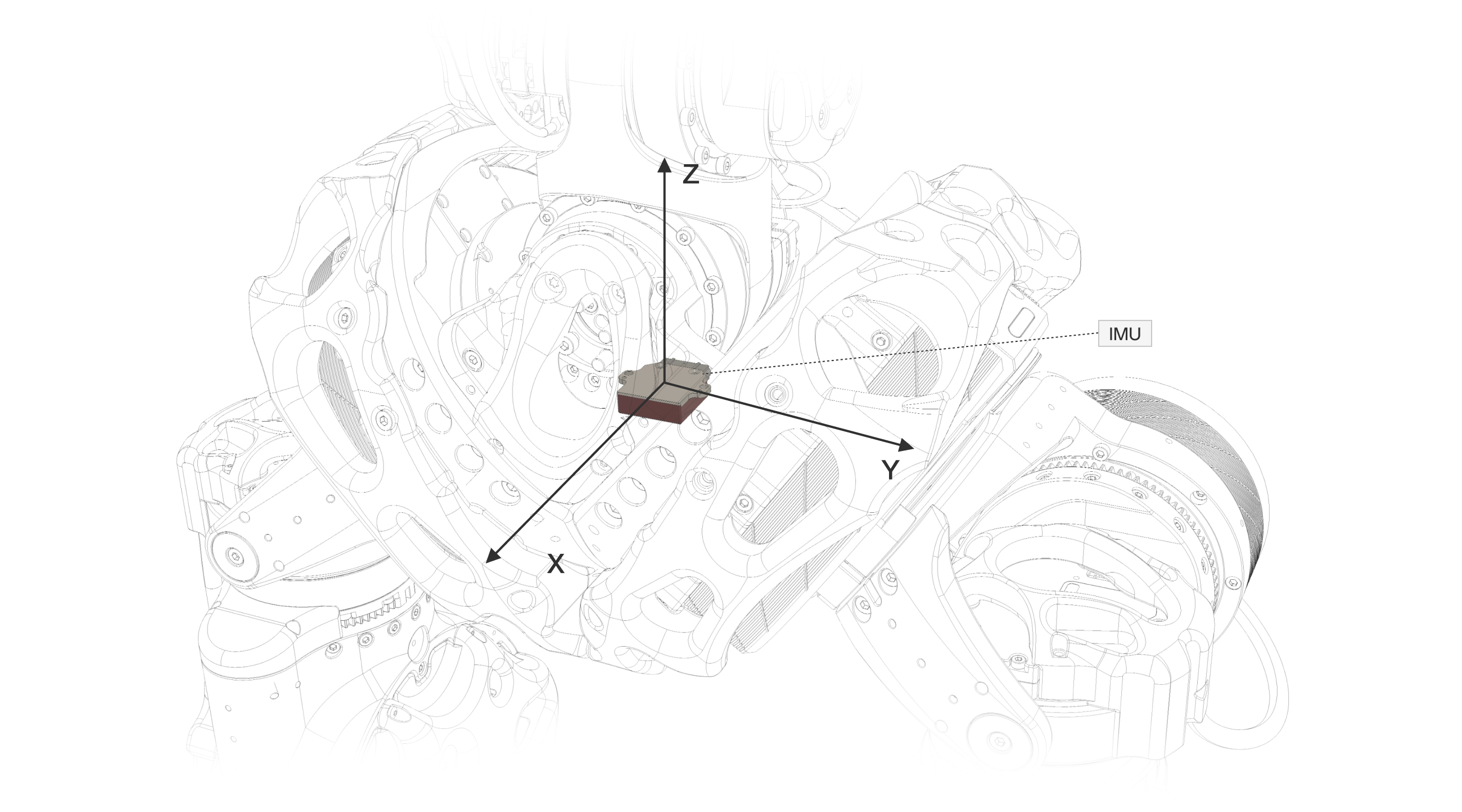
IMU Cordinate
English
简体中文
Initializing search
pndbotics/wiki
Home
Humanoid robot
Upper-body robot
Teleoperation
Reinforcement Learning
Actuators
Accessories
End effectors
Learning & Support
What's New
Wiki
pndbotics/wiki
Home
Humanoid robot
Humanoid robot
Product Introduction
Operation Guide
Operation Guide
Quick Start
Remote Control
Application Development
Application Development
SDK Overview
Architecture Description
Quick Development (Simulation)
Quick Development (Real)
Software Service Interface
Software Service Interface
DDS Communication API
Low-Level Service Interface
Low-Level Service Interface
DDS Message Definition
ROS2 Message Definition
High-Level Service Interface
High-Level Service Interface
gRPC Interface
ROS2 Interface
Low-Level Motion Development
Low-Level Motion Development
DDS Low-Level Motion Routine
ROS2 Low-Level Motion Routine
Body Joint Sequence
Hand Joint Sequence
Development Materials
Development Materials
Coordinate System
Model Files (URDF/MJCF)
Maintenance
Maintenance
Battery replacement
Arm replacement
Hook replacement
FAQ
Upper-body robot
Upper-body robot
Product Introduction
Operation Guide
Operation Guide
Quick Start
Remote Control
Application Development
Application Development
SDK Overview
Architecture Description
Quick Development (Simulation)
Quick Development (Real)
Software Upgrade
Software Service Interface
Software Service Interface
DDS Message Definition
ROS2 Message Definition
Low-Level Motion Development
Low-Level Motion Development
Body Joint Sequence
Hand Joint Sequence
Development Materials
Development Materials
Robot Coordinate System
Teleoperation
Teleoperation
Teleoperation
Experimental
Experimental
VR Immersive View
Reinforcement Learning
Reinforcement Learning
Installation and Configuration
Adam Lite Example
Adam Lite Example
Train
Play
Sim2Sim
Sim2Real
Actuators
Actuators
Product Introduction
Operation Guide
Operation Guide
Quick Start
Actuator network connection
Operation guide
Operation guide
PDS Operating instructions
PMC Operating instructions
Introduction to PSA Series Actuators
Introduction to PSA Series Actuators
PND-20-08-S
PND-20-14A-S
PND-30-14A-S
PND-50-14-S
PND-50-6F5S-P
PND-60-17-S
PND-60-20-S
PND-80-20-S
PND-80-25-S
PND-130-7F-P
PND-130A-7F-P
Software Development
Software Development
PNDrive C++ SDK
PNDrive Python SDK
FAQ
Accessories
Accessories
RCU-4
RCU-8
RCU-16
PNDEncoder
PNDEncoderR
PNDEncoderT
PNDhoist
End effectors
End effectors
PND dexterous hands
Inspire dexterous hands
AgiBot X1 OmniPicker
DH-Robotics PGC Gripper
ROBOTERA X-Hand 1
Learning & Support
Learning & Support
PNDbotics Glossary
PNDbotics College
About PNDbotics
What's New
IMU Cordinate
Back to top