🧠 Reinforcement Learning
A reinforcement learning training workflow example based on the Isaac Gym simulation platform.
This guide covers environment setup, dependency installation, training and testing procedures, enabling users to build and validate motion control strategies for PND robots within a GPU-accelerated physics simulation environment.
🖥️ Hardware & System Requirements
Isaac Gym uses GPU-accelerated simulation. The recommended configuration is as follows:
| Item | Recommended Configuration |
|---|---|
| Operating System | ≥ Ubuntu 20.04 x86_64 (Mac/Windows not supported yet) |
| GPU | NVIDIA RTX Series (recommended ≥ 8GB VRAM) |
| Driver Version | ≥ 525 |
| Python Version | Python 3.8 |
| Supported Model | Adam Lite |
🌍 Environment & Dependencies
This section describes how to create the virtual environment required for running reinforcement learning examples, and how to install PyTorch, Isaac Gym, rsl_rl, and other dependencies.
1. Create a Virtual Environment (using Conda)
It is recommended to use Conda to create an isolated virtual environment to avoid dependency conflicts.
If Conda is already installed on your system, you may skip to 1.2 Create New Environment.
1.1 Install MiniConda (if not installed)
MiniConda is a lightweight version of Conda for quickly creating and managing Python environments.
mkdir -p ~/miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
Initialize Conda:
1.2 Create New Environment
1.3 Activate Environment
2. Install PyTorch
PyTorch is used for neural network training and inference.
conda install pytorch==2.3.1 torchvision==0.18.1 torchaudio==2.3.1 pytorch-cuda=12.1 -c pytorch -c nvidia -y
3. Install Isaac Gym
Isaac Gym is NVIDIA’s GPU-accelerated physics simulation platform and is the core component of this training workflow.
3.1 Download & Install
Download Isaac Gym Preview 4 from the official website:
https://developer.nvidia.com/isaac-gym
Then extract the package and install from the python directory:
3.2 Verification
Run the sample demo:
If the simulation window pops up and displays 1080 falling balls, the installation is successful.
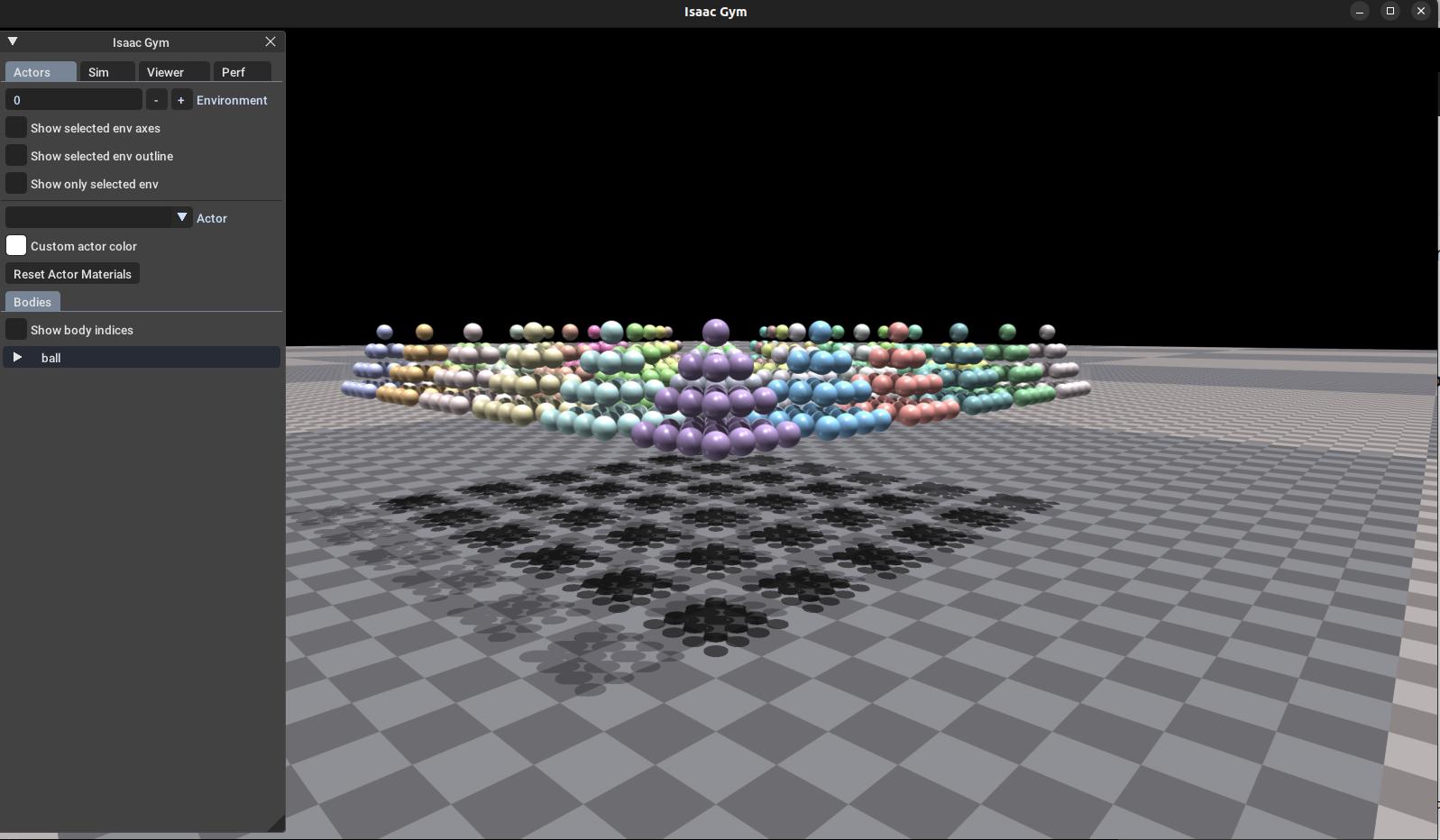
If issues occur, refer to isaacgym/docs/index.html.
4. Install rsl_rl
rsl_rl is a reinforcement learning algorithm library provided by leggedrobotics (e.g., PPO).
git clone https://github.com/leggedrobotics/rsl_rl.git
cd rsl_rl
git checkout v1.0.2
pip install -e .
🏋️ Training Workflow
1. Download the Official PND Example Code
pnd_rl_gym is PND’s Reinforcement Learning training project, containing the environment, configurations, and training scripts.
1.1 Clone Repository
1.2 Install
2. Activate Environment
3. Start Training
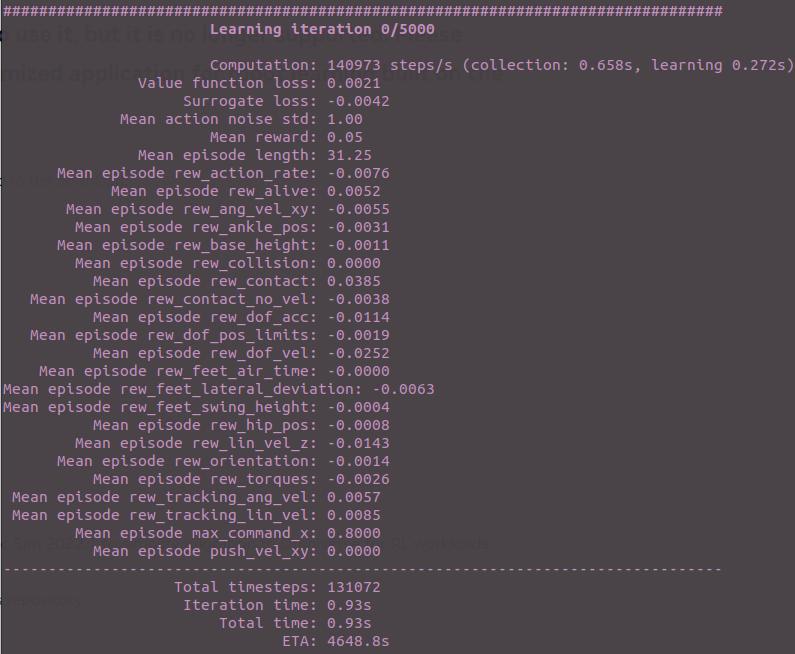
If the terminal prints logs similar to the above, training has started successfully.
4. Run Testing

📚 Acknowledgements
Last Updated: 2025-11-26