🛠️ PND Adam U 部署 SDK(DDS 版)
PND 半身机器人开发套件 支持从源码构建、仿真与真机控制的完整流程。
📘 目录
- 🌍 环境要求
- 🤖 真机控制流程
- 启动机器人控制服务
- 机器人操作说明
- 🧑💻 开发者模式
- 环境准备
- 安装并配置 pnd_sdk_python
- 使用 pnd_mujoco
- 📦 系统模块图
- 🔗 DDS 消息定义
- 🦾 维度映射说明
- 🎮 手柄控制协作
- 🔣 控制参数说明:Kp--Kd
🌍 环境要求
| 项目 | 要求 |
|---|---|
| 操作系统 | Ubuntu 22.04 x86_64(暂不支持 Mac/Windows) |
| 网络配置 | 真机运行时,确保 开发机 与 机器人 NUC 处于同一局域网内 |
| 依赖配置 | 安装cyclonedds和cyclonedds-cxx 库 |
依赖配置安装教程
# 首先安装 cyclonedds
git clone https://github.com/eclipse-cyclonedds/cyclonedds.git
cd cyclonedds
git checkout 0.10.2
mkdir build
cd build
cmake ..
make -j8
sudo make install
# 其次安装 cyclonedds-cxx
git clone https://github.com/eclipse-cyclonedds/cyclonedds-cxx.git
cd cyclonedds-cxx
git checkout 0.10.2
mkdir build
cd build
cmake ..
make -j8
sudo make install
🤖 真机控制流程
1️⃣ 启动机器人控制服务
步骤 1:启动 pndrobotdds
ssh pnd-humanoid@192.168.41.xx
cd ~/Documents/adam_u_deploy_dds/pndrobotdds
sudo ./run.sh
# SDK 完成启动

✅ 提示:当终端出现
[DDS] Starting publish loop (400 Hz)...表示服务已成功启动。
步骤 2:启动 pndadamudds
ssh pnd-humanoid@192.168.41.xx
cd ~/Documents/adam_u_deploy_dds/pndadamudds
sudo ./run.sh
# 机器人启动后默认进入 Stop 模式
✅ 提示:当终端出现
FSM start!时,表示服务已成功启动。
2️⃣ 机器人操作说明
操作模式说明
Stop 模式(阻尼模式)
- 触发按键:LT + B
- 功能描述:初始化机器人状态。除腰部 Pitch 与 Roll 外,其余关节进入阻尼模式。
Zero 模式(回零模式)
- 触发按键:A
- 功能描述:机器人返回零位位置。
进入UserControl 模式(开发者模式)
- 触发按键:LT + Y(仅可在 Zero 模式下切换)
- 功能描述:接收用户发送的控制数据,实现精确控制。
- 注意事项:切换至该模式时,机器人应处于零位位置;发送数据时避免波动过大,以免引发异常动作。
退出 UserControl 模式
- 触发按键:LT + B
- 功能描述:紧急退出用户控制,切回 Stop 模式。
Func 模式(功能模式)
- 触发按键:X
-
子功能:
-
预定动作:按 RB 顺序触发预设动作
- 连续预定动作:按 RT + RB 连续执行多个预设动作
- 遥操数据接收:按十字按键“右”进入遥操接收模式,按十字键“左”退出遥操接收模式
-
数据记录:
- 触发按键:LT + LB(开始/结束记录)
- 路径:
pndadamudds/logs/retarget_record.txt - 内容:31 个数据(全部关节 + 手指位置)
动作重演方法
将 retarget_record.txt 复制到
pndadamudds/resource/motion 目录下即可循环播放。
电源管理
- 掉电:LB + RB
- 上电:Y + B
🧑💻 开发者模式
0️⃣ 环境准备
-
使用网线连接笔记本与机器人

-
设置笔记本 IP:
| 参数 | 值 |
|---|---|
| IP 地址 | 10.10.20.111 |
| 子网掩码 | 255.255.255.0 |

2️⃣ 安装并配置 pnd_sdk_python
安装依赖与源码
sudo apt install libyaml-cpp-dev libspdlog-dev libboost-all-dev libglfw3-dev
sudo apt install python3-pip
cd ~
git clone https://github.com/pndbotics/pnd_sdk_python.git
🔗 详情参考:pnd_sdk_python GitHub
3️⃣ 使用 pnd_mujoco
① 获取网卡名称
查找 IP 为 10.10.20.111 的网卡名。
② 安装 pnd_mujoco
pip3 install mujoco
pip3 install pygame
cd ~
git clone https://github.com/pndbotics/pnd_mujoco.git
cd pnd_mujoco
cd ../pnd_sdk_python
sudo pip3 install -e .
③ mujoco启动示例
Mujoco 版本: 3.2.0
③ 真机启动示例
真机控制前提:
确认机器人端 ~/Documents/adam_u_deploy_dds 已运行成功(参考启动机器人控制服务)。
真机状态切换到 UserControl模式: 参考操作模式说明
🔗 详情参考:pnd_mujoco README
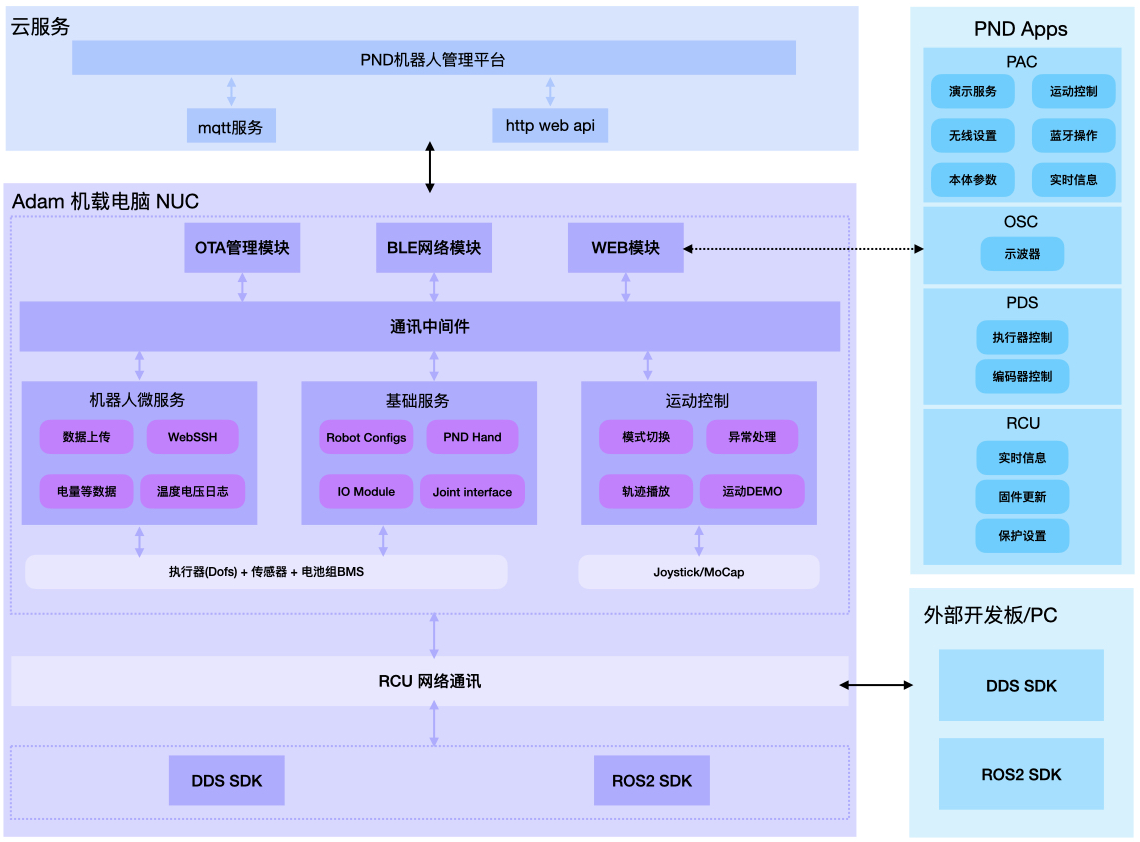
📦 系统模块图
🔗 DDS 消息定义
1️⃣ 下发消息:rt/lowcmd(身体期望位置)
| 字段 | 类型 | 维度 | 含义 |
|---|---|---|---|
motor_cmd |
MotorCmd_ |
19 | 19 个执行器期望位置 |
reserve |
unsigned long |
1 | 保留字段 |
2️⃣ 订阅消息:rt/lowstate(身体实际状态)
| 字段 | 类型 | 维度 | 含义 |
|---|---|---|---|
motor_cmd |
MotorCmd_ |
19 | 19 个执行器实际位置 |
reserve |
unsigned long |
1 | 保留字段 |
3️⃣ 下发消息:rt/handcmd(手指期望位置)
| 字段 | 类型 | 维度 | 含义 |
|---|---|---|---|
position |
unsigned long |
12 | 手部期望位置 |
reserve |
unsigned long |
1 | 保留字段 |
4️⃣ 订阅消息:rt/handstate(手指实际状态)
| 字段 | 类型 | 维度 | 含义 |
|---|---|---|---|
position |
unsigned long |
12 | 手部实际位置 |
reserve |
unsigned long |
1 | 保留字段 |
5️⃣ 单个关节数据类型:MotorCmd_
| 字段 | 类型 | 含义 |
|---|---|---|
mode |
octet |
模式(0) |
q |
float |
位置 |
dq |
float |
速度 |
tau |
float |
力矩 |
kp |
float |
刚度(不可修改) |
kd |
float |
阻尼(不可修改) |
reserve |
unsigned long |
保留字段 |
6️⃣ 单个关节数据类型:MotorState_
| 字段 | 类型 | 含义 |
|---|---|---|
mode |
octet |
模式(0) |
q |
float |
位置 |
dq |
float |
速度 |
tau_est |
float |
力矩估计 |
motorstate |
unsigned long |
当前状态 |
reserve |
unsigned long |
保留字段 |
🦾 维度映射说明
身体关节(19 维)
| 索引 | 关节名称 | 部位 |
|---|---|---|
| 0 | waistRoll |
躯干 |
| 1 | waistPitch |
躯干 |
| 2 | waistYaw |
躯干 |
| 3 | neckYaw |
颈部 |
| 4 | neckPitch |
颈部 |
| 5–11 | 左臂关节 | 左臂 |
| 12–18 | 右臂关节 | 右臂 |
手部数据(12 维)
| 索引范围 | 对应手 |
|---|---|
| 0–5 | 左手 |
| 6–11 | 右手 |
单手关节映射
| 索引 | 部位 |
|---|---|
| 1 | 小拇指(Pinky) |
| 2 | 无名指(Ring) |
| 3 | 中指(Middle) |
| 4 | 食指(Index) |
| 5 | 大拇指(Thumb) |
| 6 | 大拇指侧向(Lateral) |
🎮 手柄控制协作
按键功能映射
| 按键组合 | 功能说明 |
|---|---|
| A | 所有关节回零位 |
| X | 切换 Ready 状态 |
| B | 阻尼模式锁定 |
| LB + RB | 关节电源开关(禁用中) |
数据结构定义
#define XBOX_TYPE_BUTTON 0x01
#define XBOX_TYPE_AXIS 0x02
// 按钮映射
#define XBOX_BUTTON_A 0x00
#define XBOX_BUTTON_B 0x01
#define XBOX_BUTTON_X 0x03
#define XBOX_BUTTON_Y 0x04
#define XBOX_BUTTON_LB 0x06
#define XBOX_BUTTON_RB 0x07
#define XBOX_BUTTON_START 0x02
#define XBOX_BUTTON_BACK 0x05
#define XBOX_BUTTON_HOME 0x08
#define XBOX_BUTTON_LO 0x09 /* 左摇杆按钮 */
#define XBOX_BUTTON_RO 0x0a /* 右摇杆按钮 */
// 摇杆与方向键映射
#define XBOX_AXIS_LX 0x00
#define XBOX_AXIS_LY 0x01
#define XBOX_AXIS_RX 0x02
#define XBOX_AXIS_RY 0x03
#define XBOX_AXIS_LT 0x05
#define XBOX_AXIS_RT 0x04
#define XBOX_AXIS_XX 0x06
#define XBOX_AXIS_YY 0x07
// 值定义
#define XBOX_AXIS_VAL_UP -32767
#define XBOX_AXIS_VAL_DOWN 32767
#define XBOX_AXIS_VAL_LEFT -32767
#define XBOX_AXIS_VAL_RIGHT 32767
#define XBOX_AXIS_VAL_MIN -32767
#define XBOX_AXIS_VAL_MAX 32767
#define XBOX_AXIS_VAL_MID 0x00
// 数据结构
typedef struct xbox_map {
int time;
int a, b, x, y;
int lb, rb, start, back, home;
int lo, ro;
int lx, ly, rx, ry;
int lt, rt, xx, yy;
} xbox_map_t;
🔣 控制参数说明:Kp / Kd
仿真环境(Isaac Gym)
PD 控制器:
\[\tau = K_p e_p + K_d e_v\]
| 参数 | 含义 |
|---|---|
| (K_p) | 刚度 |
| (K_d) | 阻尼 |
| (e_p) | 位置误差 |
| (e_v) | 速度误差 |
真实机器人执行器
PID 控制器公式:
\[I = P_p P_v e_p + P_v e_v$$
$$\tau' = g I K_t = g(P_p P_v K_t e_p + P_v K_t e_v)\]
| 参数 | 含义 |
|---|---|
| (P_p) | 位置环比例参数 |
| (P_v) | 速度环比例参数 |
| (g) | 齿轮比 |
| (K_t) | 扭矩常数 |
Sim-to-Real 参数关系
满足 \(\tau = \tau'\) 时:
\[K_p = g P_p P_v K_t$$
$$K_d = g P_v K_t$$
$$P_v = \frac{K_d}{K_t g}$$
$$P_p = \frac{K_p}{K_d}\]