PMC操作说明
PND Motion Control (PMC)是一款自研的执行器运动控制软件。
使用说明
- 将PMC树莓派开机
- 将平板电脑连接PMC树莓派所在网络并打开下载的app,您将会看到以下内容,如图所示:
设备查找页面
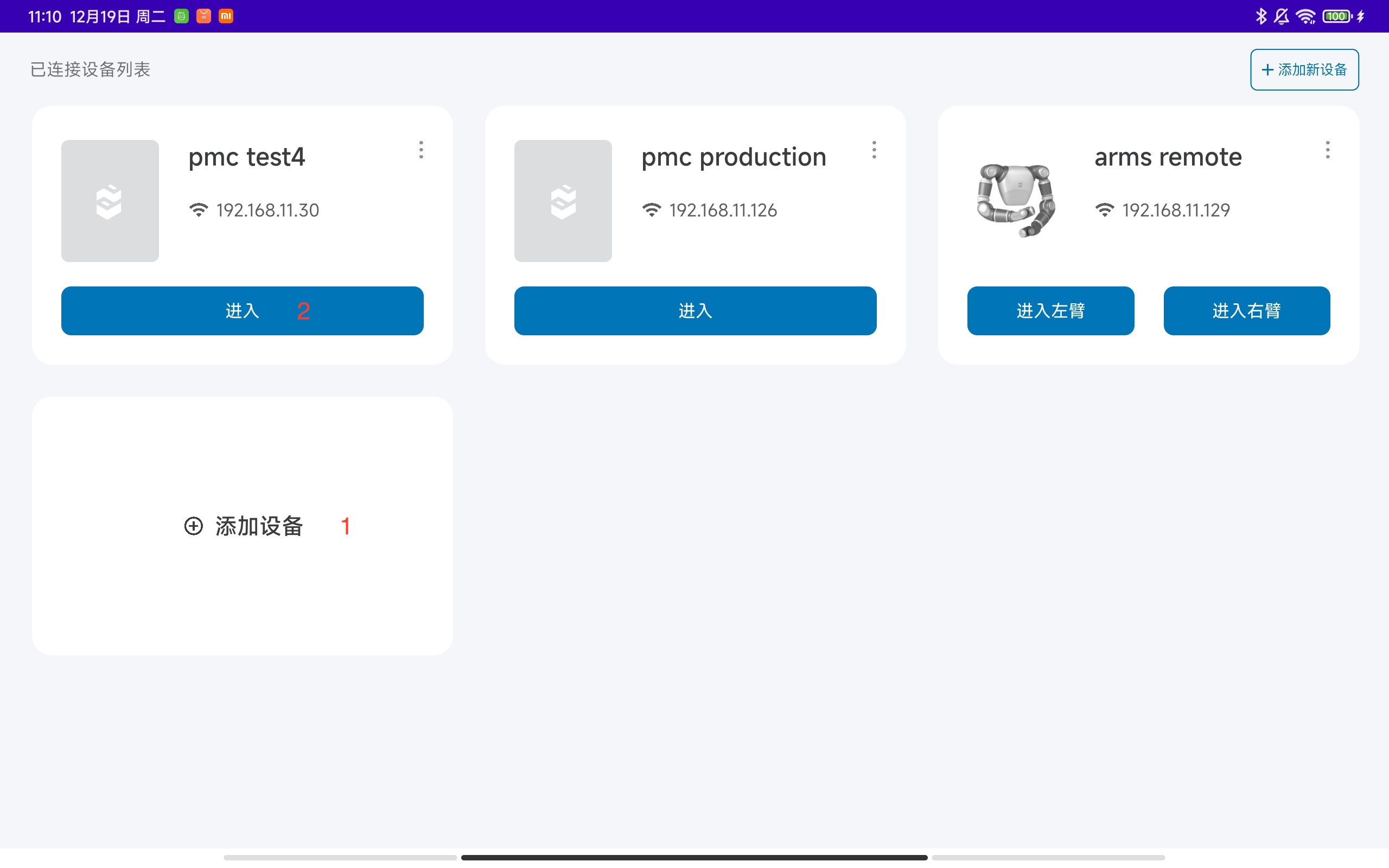
- 点击添加设备按钮,进入配网页面。
- 进入PMC操作页面。
提示
待配网操作完成之后,只需等待PMC卡片显示出来即可。
设备配网页面
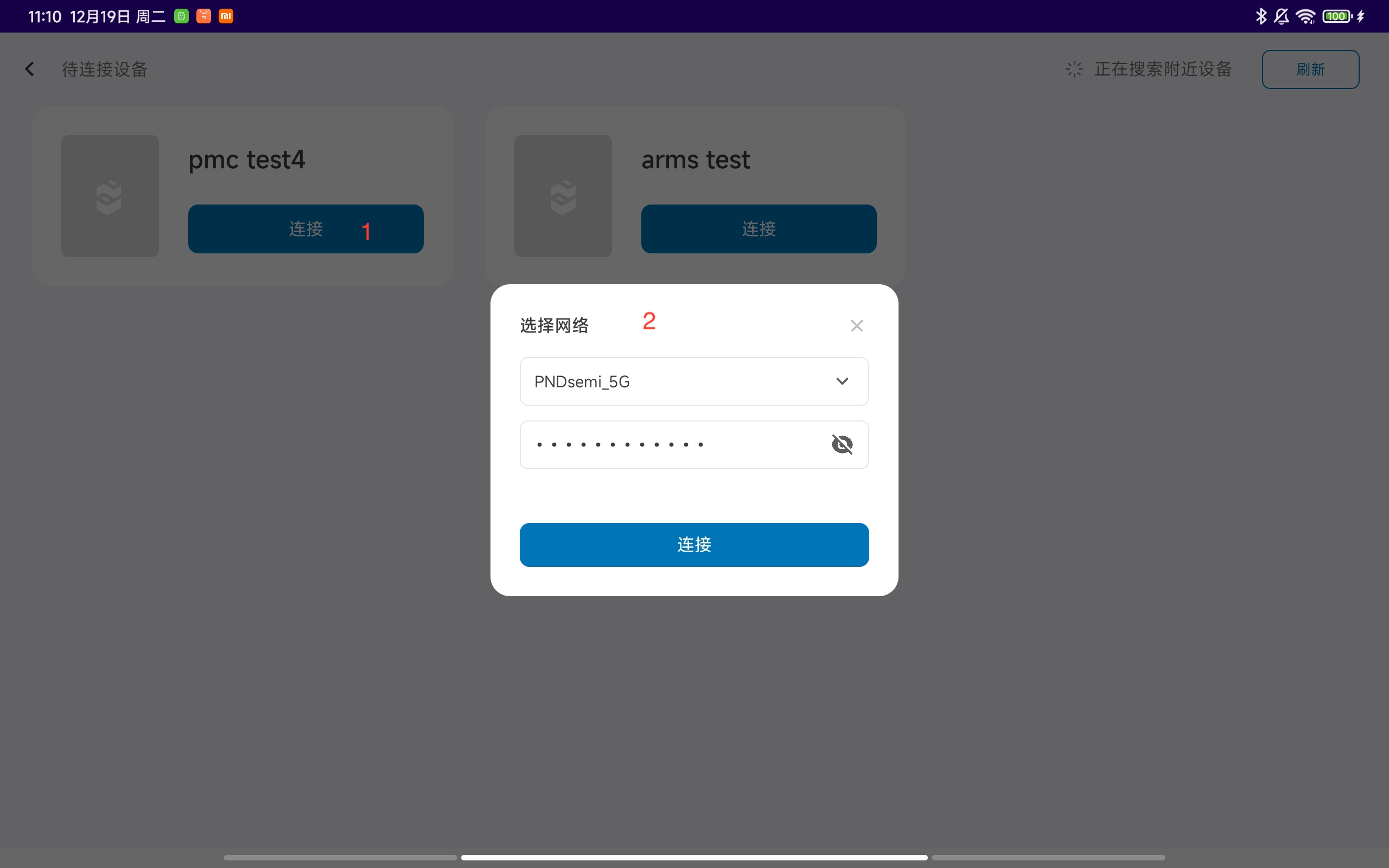
- 1 打开配网弹框。
- 2 输入Wi-Fi网络的名称和密码,点击连接按钮,待配网成功后返回设备查找页面。
控制页面
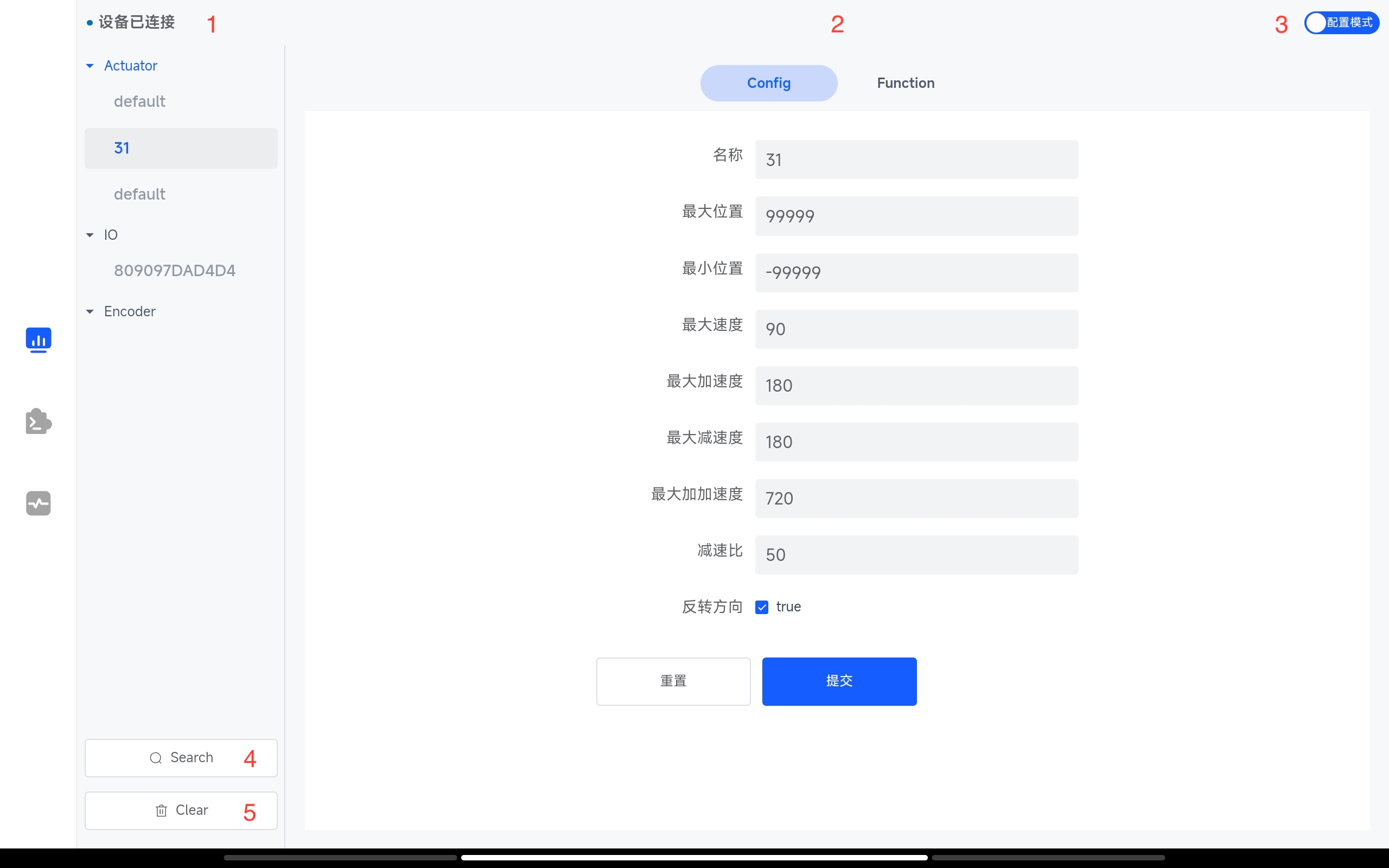
- 设备连接状态,有已连接和未连接两个状态。
- 切换设备配置页面和功能页面。
- 切换配置模式和运行模式。
- 搜索设备列表,设备包括执行器、IO板、编码器。
- 清除设备列表。
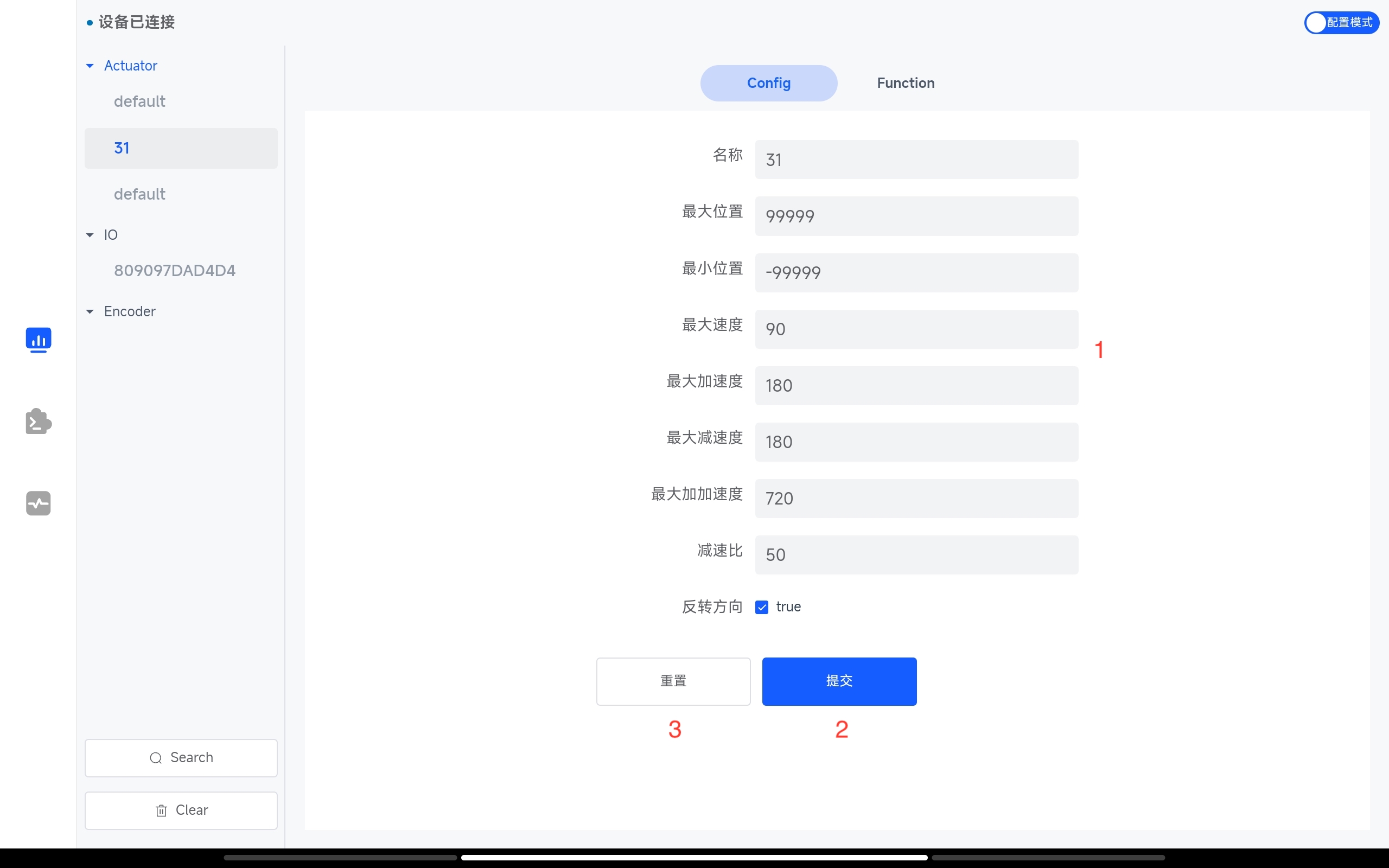
执行器配置页面
-
- 设置执行器配置参数。
- 提交执行器配置参数。
- 重置执行器配置参数。
执行器功能页面
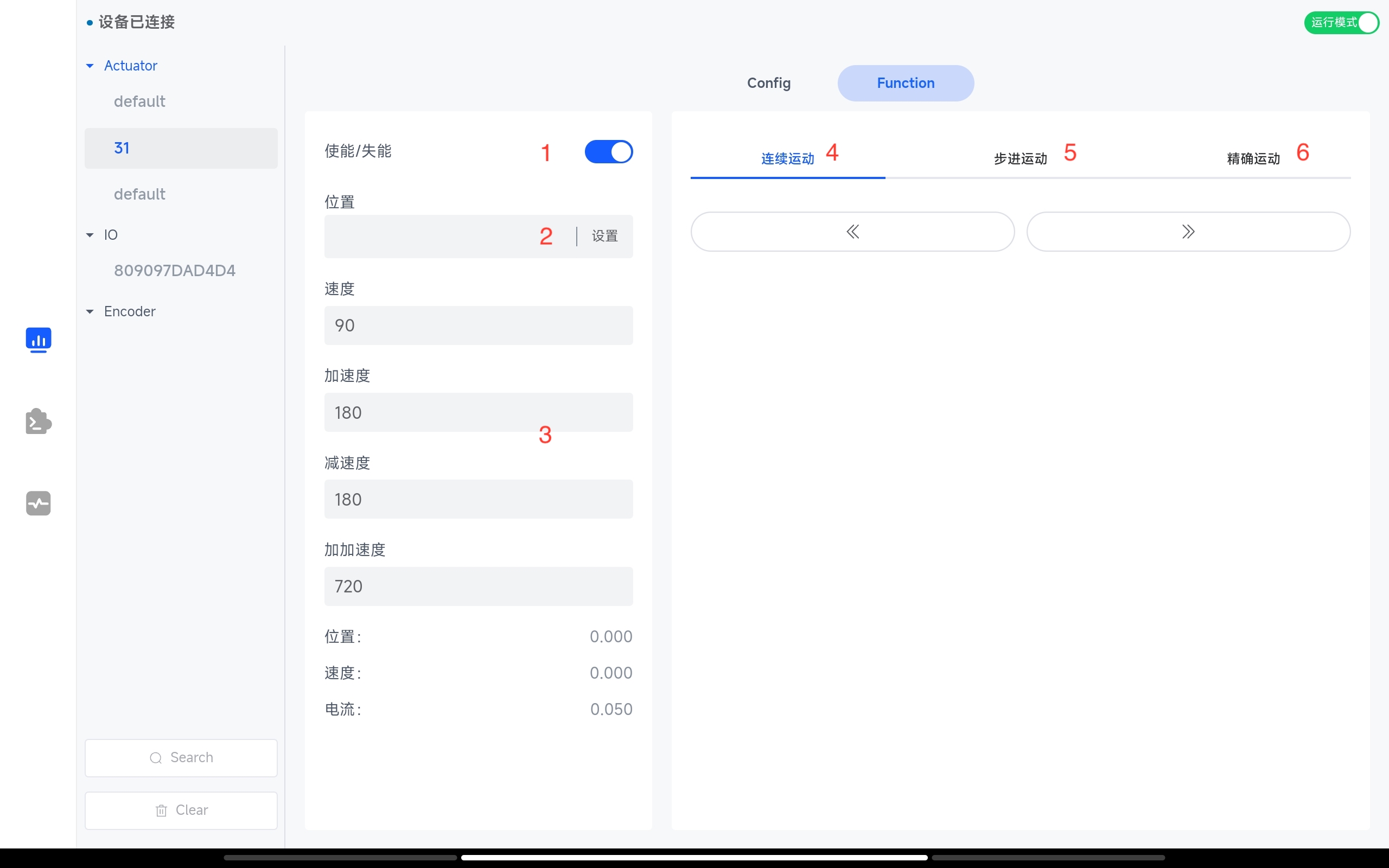
-
- 对执行器进行使能或失能。
- 设置执行器当前位置。
- 设置执行器运行参数。
- 正反方向的连续运动。
- 正反方向的步进运动,可设置步进值。
- 精确运动,可设置执行器的目标值。
IO配置页面
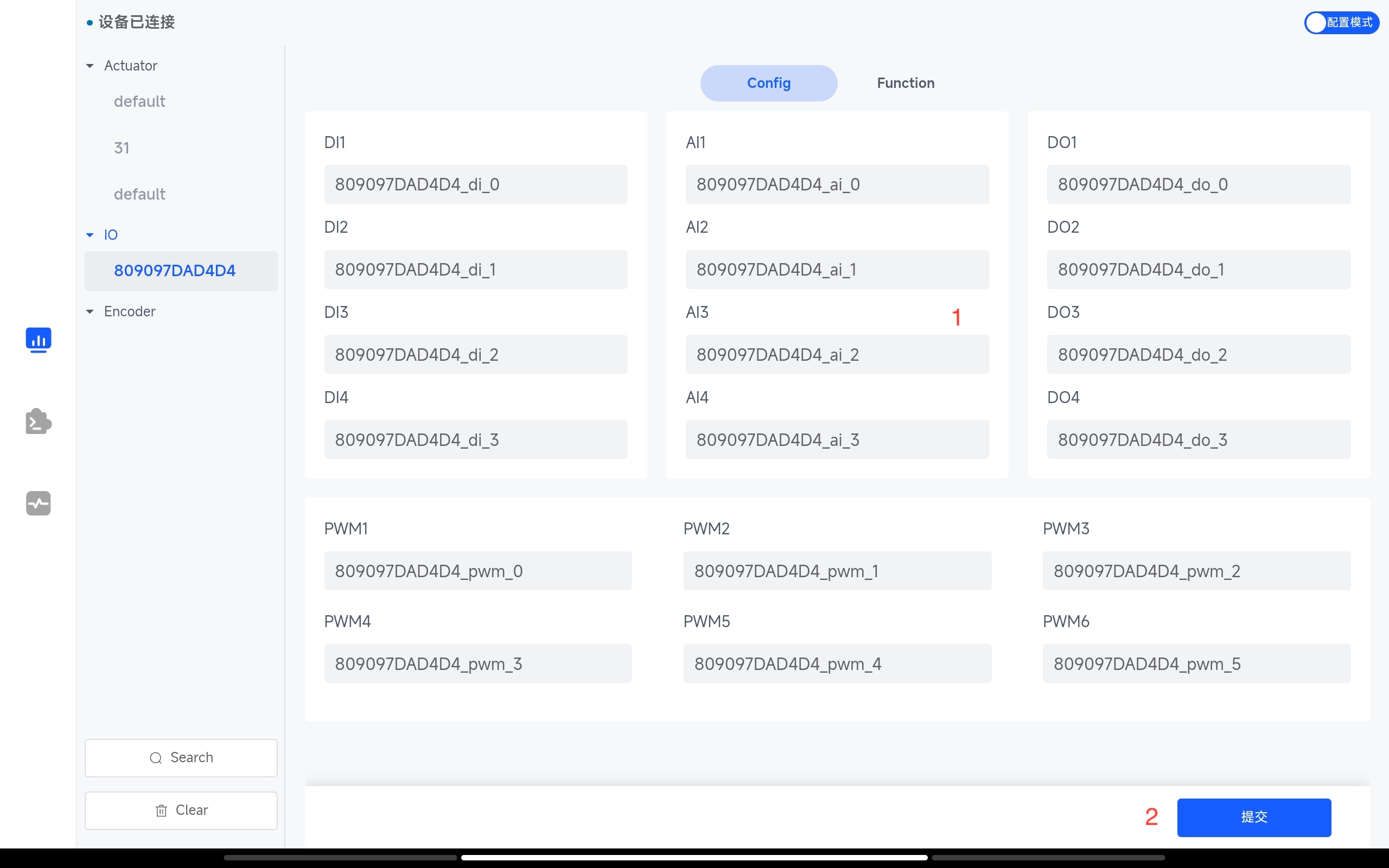
-
- 设置IO的名称。
- 提交设置的IO名称。
IO功能页面
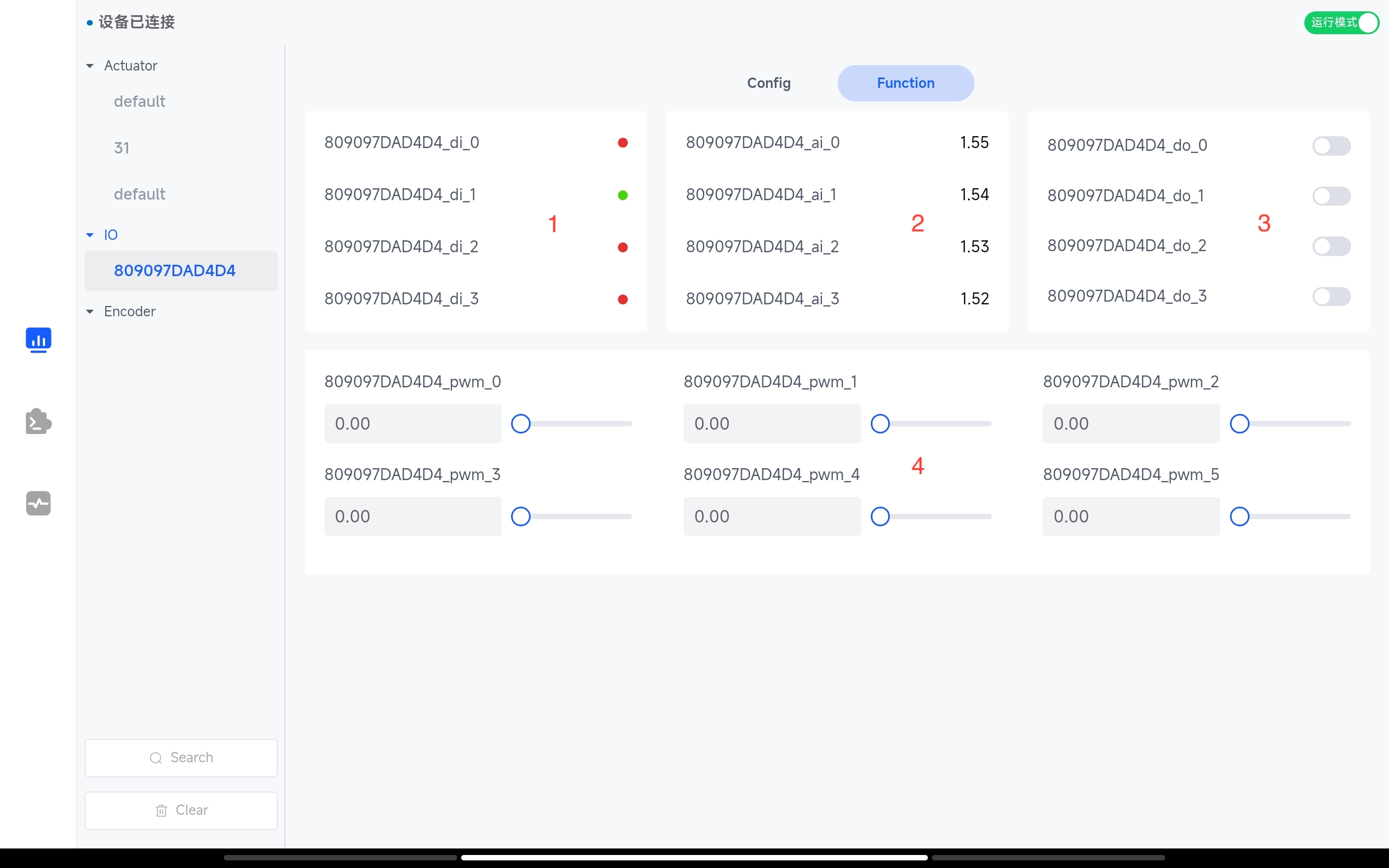
-
- 数字量输入。
- 模拟量输入。
- 数字量输出。
- 脉冲宽度调制。
编程页面
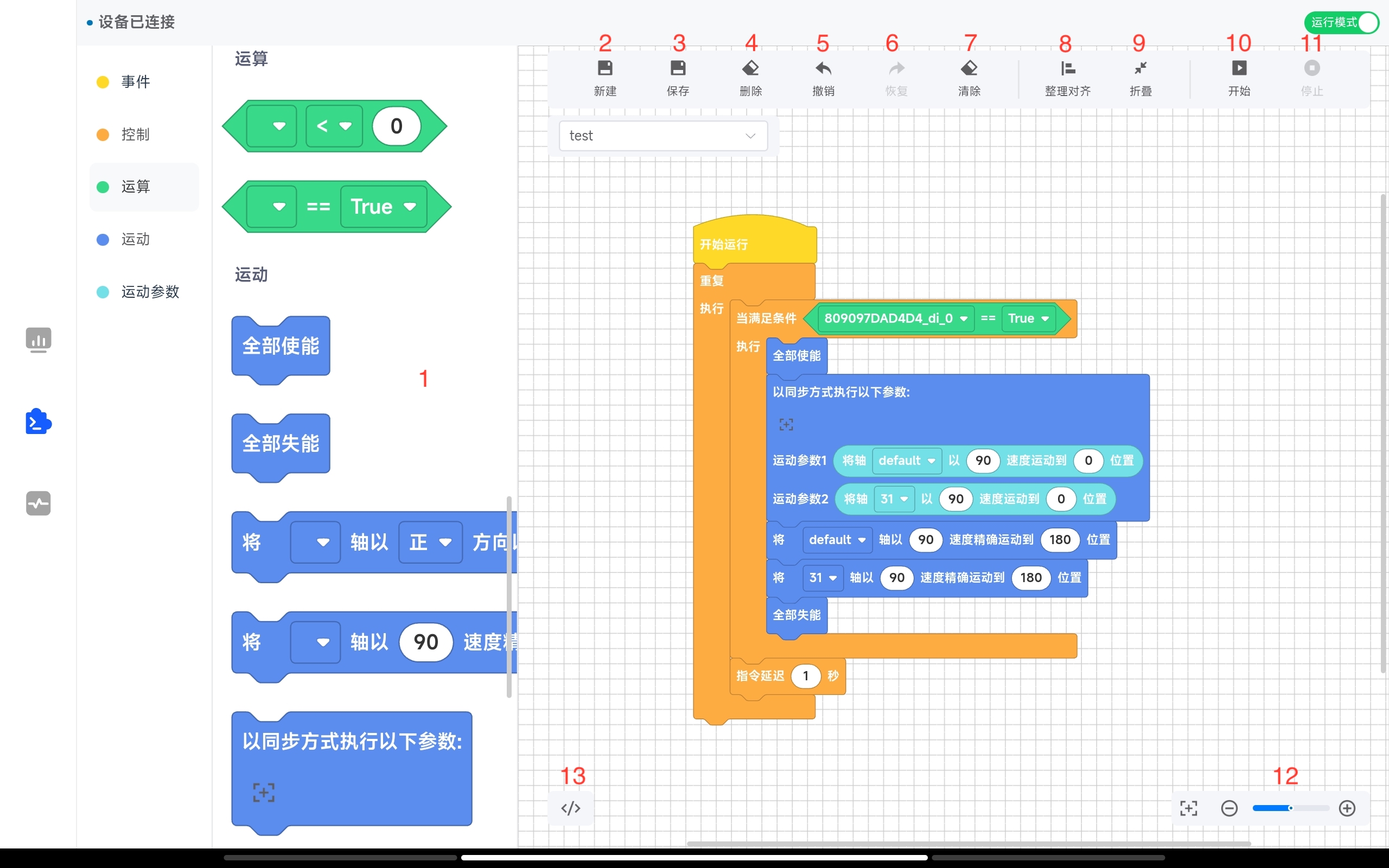
- 编程指令模块拖拽区。
- 新建编程记录。
- 保存编程记录。
- 删除编程记录。
- 撤销操作。
- 恢复操作。
- 清除工作区指令模块。
- 整理对齐工作区指令模块。
- 折叠工作区指令模块。
- 运行工作区模块指令。
- 停止运行工作区模块指令。
- 缩放工作区。
- 查看python代码。
点击13按钮可查看拖拽到工作区的指令模块对应的python代码
def main():
while 1:
while io_state('809097DAD4D4_di_0') == True:
enable({"req":[{"id":"EC396A5D8634","enable_cmd":1},{"id":"48116B5D8634","enable_cmd":1},{"id":"4C451D519140","enable_cmd":1},{"id":"34D59DEBD724","enable_cmd":1},{"id":"341ED5549434","enable_cmd":1},{"id":"681201519140","enable_cmd":1},{"id":"30DD6A5D8634","enable_cmd":1}]})
sync_motion({"req":[{"id":"EC396A5D8634","max_vel":90,"target_pos":0},{"id":"48116B5D8634","max_vel":90,"target_pos":0}]})
move_abs({"req":[{"id":"EC396A5D8634","max_vel":90,"move_abs_cmd":1,"target_pos":180}]})
move_abs({"req":[{"id":"48116B5D8634","max_vel":90,"move_abs_cmd":1,"target_pos":180}]})
enable({"req":[{"id":"EC396A5D8634","enable_cmd":2},{"id":"48116B5D8634","enable_cmd":2},{"id":"4C451D519140","enable_cmd":2},{"id":"34D59DEBD724","enable_cmd":2},{"id":"341ED5549434","enable_cmd":2},{"id":"681201519140","enable_cmd":2},{"id":"30DD6A5D8634","enable_cmd":2}]})
time.sleep(1)