PDS操作说明
PNDbotics Studio(PDS)是一款自研跨平台的图形用户界面(GUI)工具,可满足PSA执行器和模块的配置、监视及测试等需求。推荐您在开发阶段全程使用PDS,尤其是在需要绘制或记录监测数据的场合。 在编写新程序之前,作用域可用于确保所有设备正确连接且系统整体正常运行。在开发或调试新应用程序时,对于查看实时系统上的反馈信息和调整增益等操作作用显著。
PDS有两种访问方式,您可以根据不同操作系统下载对应的软件版本,也可以通过浏览器使用网页版界面。
网页版使用说明
网络连接
确保您的电脑和RCU或者Adam处在同一网络内。具体方法详见对应产品说明。
网页端访问
启动任意浏览器,在地址栏输入设备IP地址(设备IP查看方法,详见您购买的产品说明),端口为8080,示例如下:
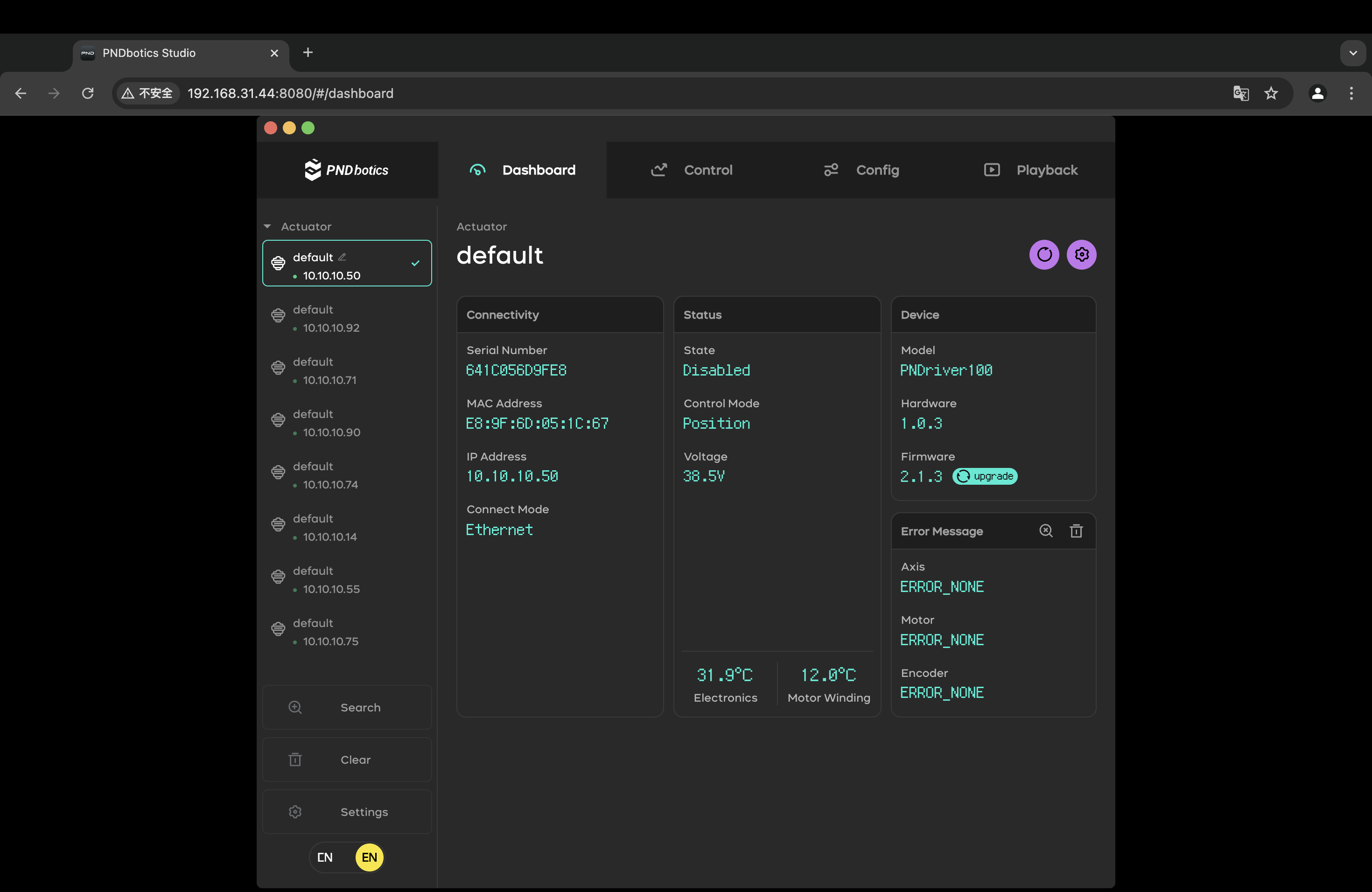
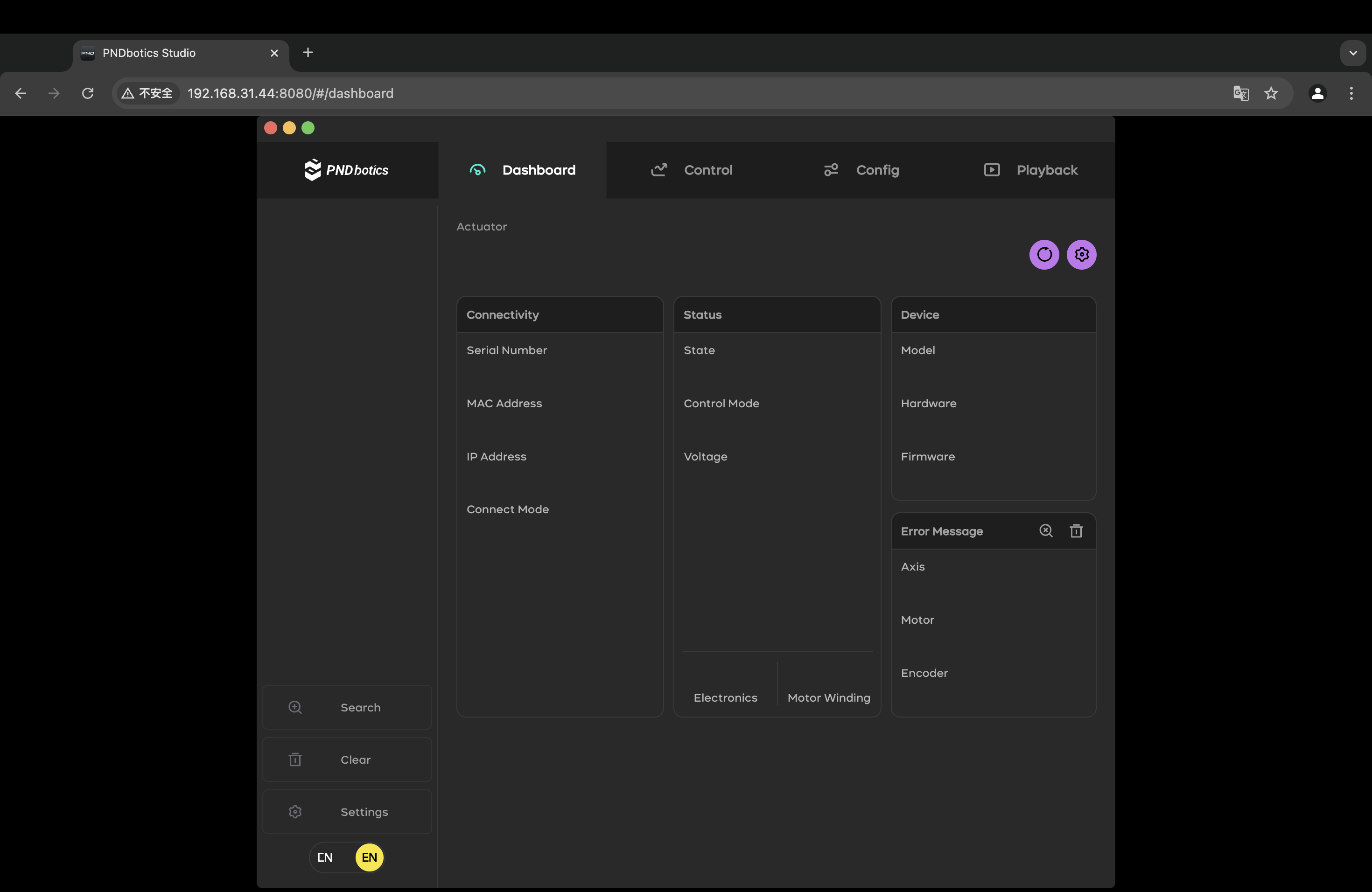
网页版界面加载成功后如下图所示:
客户端版使用说明
PDS目前已分别适配于Windows、Linux和Mac操作系统,您可根据实际需求来选择与之对应的软件版本。
Windows
Linux
Mac
提示
PDS软件的Mac版本兼容Intel处理器和Apple M1芯片。
安装说明
Windows(仅支持win7、win8、win10、win11的64位操作系统)
- 打开下载文件路径,找到PDS软件安装包
- 双击
PDS-xxx-win32-x64.exe
Linux x64架构
- 下载
PDS-xxx-linux-x86_64.AppImage - 打开终端进入到
PDS-xxx-linux-x86_64.AppImage所在目录 - 给AppImage赋予执行权限
- 运行
Linux arm 32位架构
AppImage
- 下载
PDS-xxx-linux-armv7l.AppImage - 打开终端进入到
PDS-xxx-linux-armv7l.AppImage所在目录 - 给AppImage赋予执行权限
- 运行
Linux arm 64位架构
AppImage
- 下载
PDS-xxx-linux-arm64.AppImage - 打开终端进入到
PDS-xxx-linux-arm64.AppImage所在目录 - 给AppImage赋予执行权限
- 运行
MacOS
- 双击
PDS-xxx-darwin-x64.dmg/PDS-1.0.4-darwin-arm64.dmg - 拖动PDS到文件夹
- 在应用程序中双击图标打开
提示
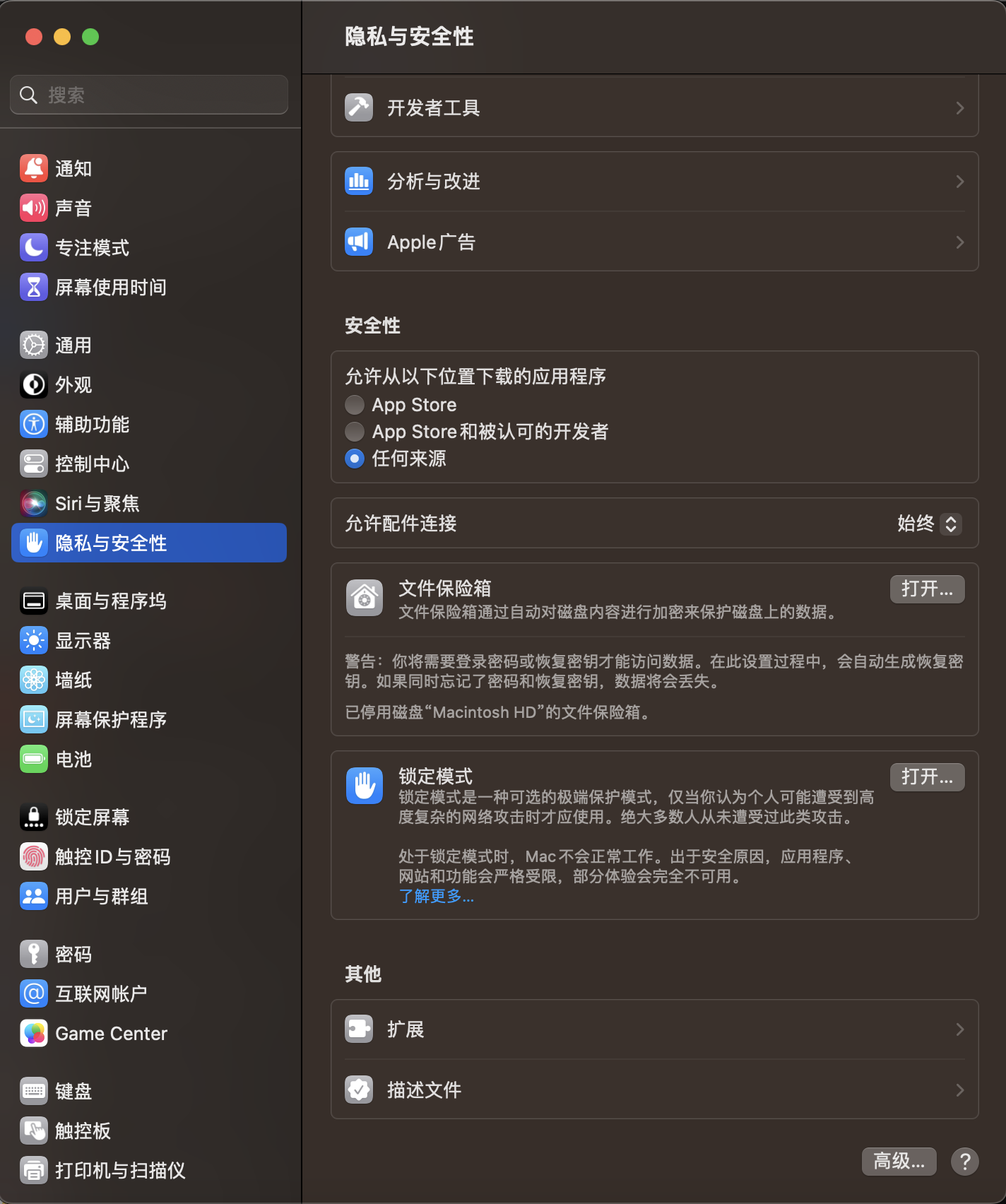
在Mac系统,安装应用时,如提示“应用程序已损坏,无法打开”,可采用以下操作修复:
一、开启任何来源
打开终端,输入命令:
检查系统设置:系统设置—>隐私与安全性->安全性,检查是否已经启用了“任何来源”选项。
二、绕过公证
打开终端,输入命令:
三、以上操作若还不能解决,尝试关闭SIP系统完整性保护。
入门指南
- 确保所有执行器都已上电,并连接到本地网络。
- 通过双击启动应用程序。
PAS系列执行器的菜单列表:
- 设备列表:包显示当前Actuator连接的所有设备列表,包括执行器和控制盒。
- Search:点击该按钮后台将对默认IP 255.255.255.255 进行广播3s,并将搜索到的执行器添加到设备列表中。
- Clear:清除设备列表功能。
- Settings:点击按钮将启动设置广播对话框。
Settings页面:
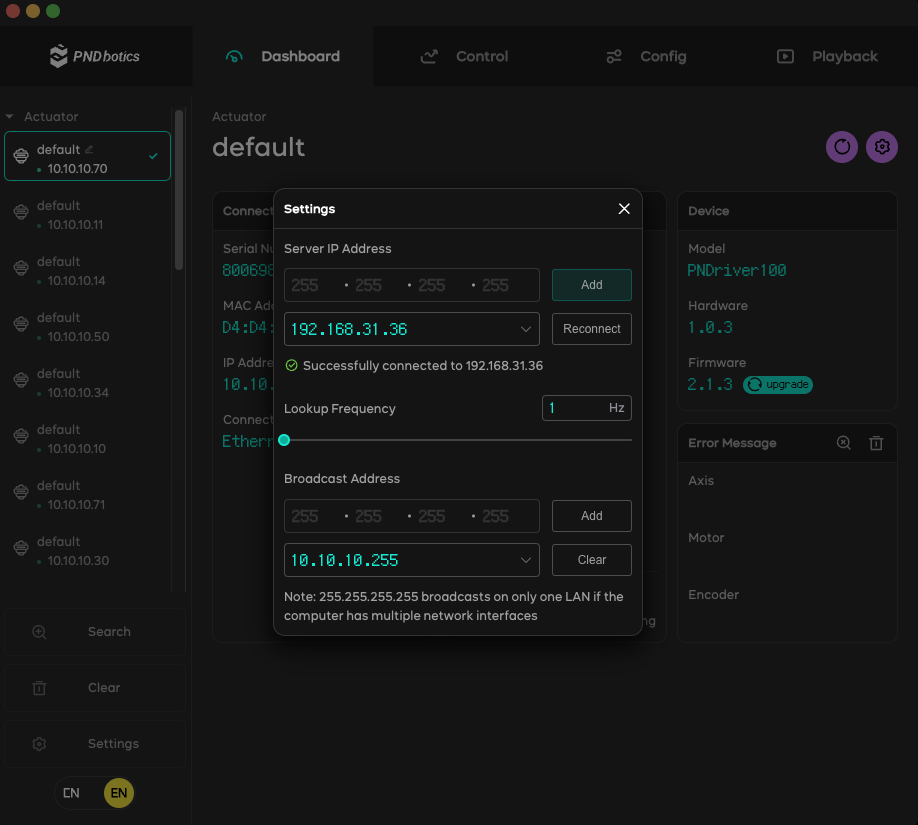
Settings页面设置:
Server IP Address:下拉菜单,用于选择服务端地址。右侧的“Add”和“Reconnect”按钮可分别增加服务端和重新连接服务端。Lookup Frequency:GUI反馈元素更新的速率,推荐设置为1~5Hz范围内。Brodcast Address:下拉菜单,用于选择广播的网络地址。右侧的“Add”和“Clear”按钮可分别增加和删除IP。
执行器状态展示
- 绿色圆点表示设备在线。
- 红色圆点表示设备不在线。
- 单击设备卡片表示选中当前设备。
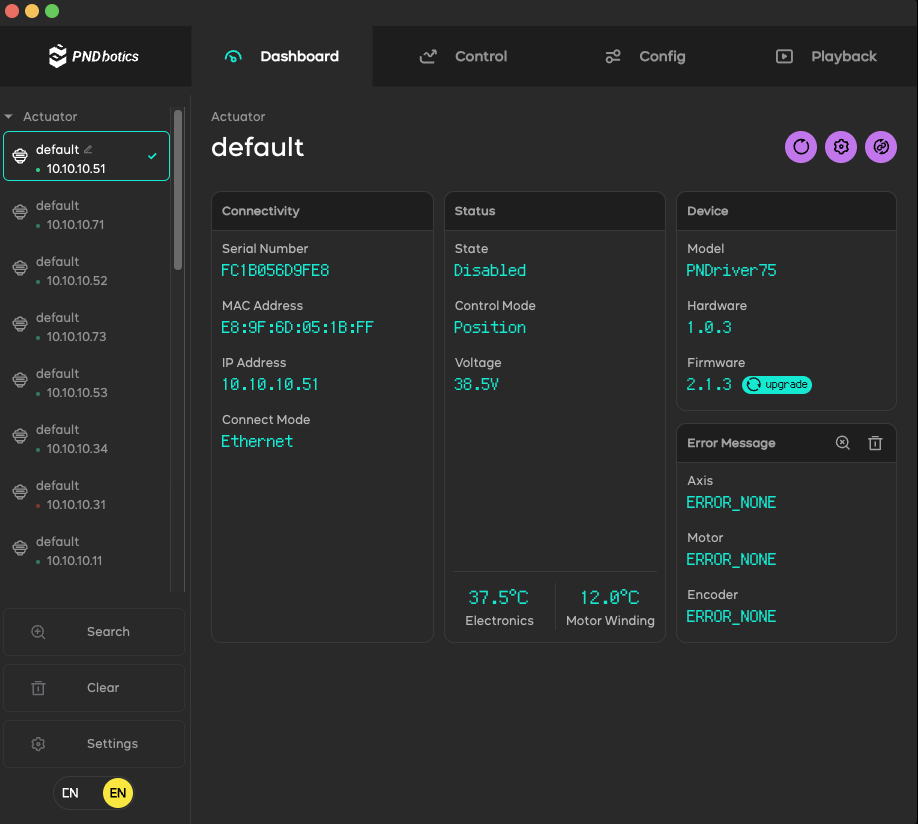
Dashboard仪表盘选项卡
Dashboard仪表盘选项卡可显示执行器的一般信息。
- Reboot
 :重启执行器功能。
:重启执行器功能。 - Network Settings
 :网络设置功能。
:网络设置功能。 - Reconnect
 :重新连接服务器,更新执行器实时数据信息。
:重新连接服务器,更新执行器实时数据信息。 - Connectivity:网络连接显示栏
- Serial Number:显示执行器序列号
- MAC Address:mac地址
- IP Address:ip地址
- Connect Mode:连接方式(Ethernet、Wi-Fi)。
- Status:状态栏
- State:显示执行器的当前使能状态(Able、Disabled)
- Control Mode:控制模式(Position,Velocity,Current)
- Voltage:执行器电压
- Device:设备信息显示栏
- Model:显示执行器模型编号
- Hardware:硬件编号
- Firmware:固件编号
- upgrade:OTA升级
- Error Message:错误信息显示栏
- Axis:执行器错误信息显示
- Motor:电机错误信息显示
- Encoder:编码器错误信息显示
点击该 ![]() 按钮,当执行器发生错误时,显示执行器的错误信息。
按钮,当执行器发生错误时,显示执行器的错误信息。
点击 ![]() 按钮,清除执行器错误,并清除当前执行器的仪表盘界面的错误信息。
按钮,清除执行器错误,并清除当前执行器的仪表盘界面的错误信息。
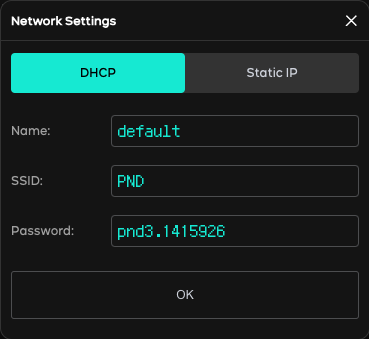
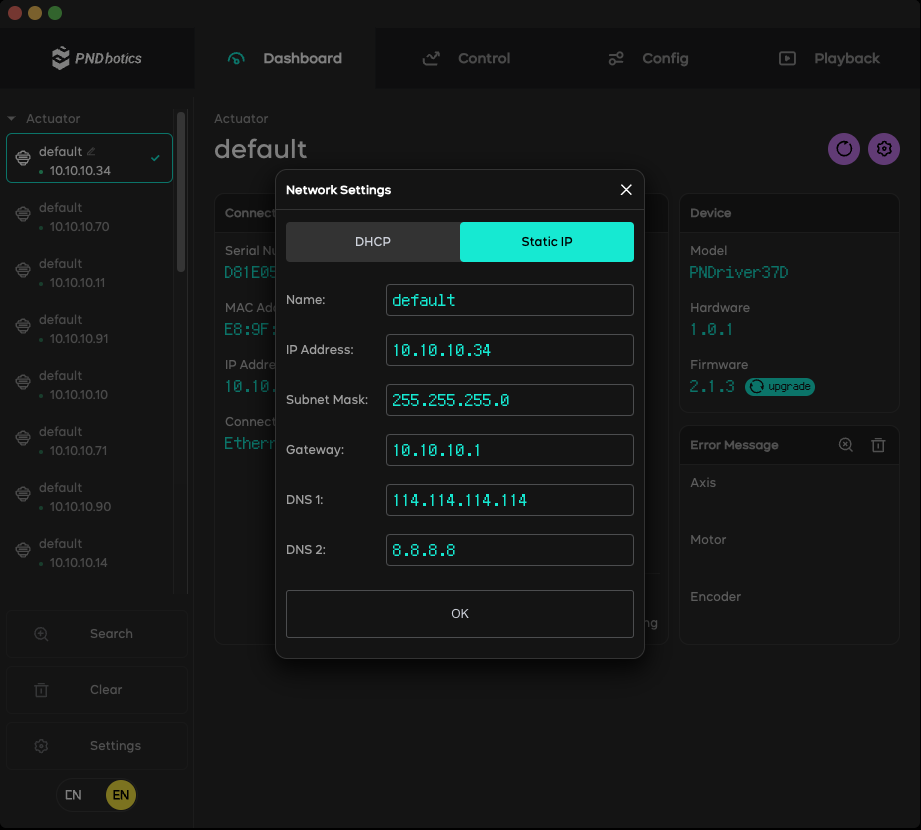
执行器网络设置
DHCP:动态IP模式设置,设置执行器名称Name、SSID及Password。
Static IP:静态IP模式设置,设置执行器名称Name、IP Adderss:IP地址、Subnet Mask:子网、Gateway:网关、DNS 1和DNS2:dns_1和dns_2地址。
Control控制选项卡
控制选项卡可向执行器发送位置,速度,电流命令。
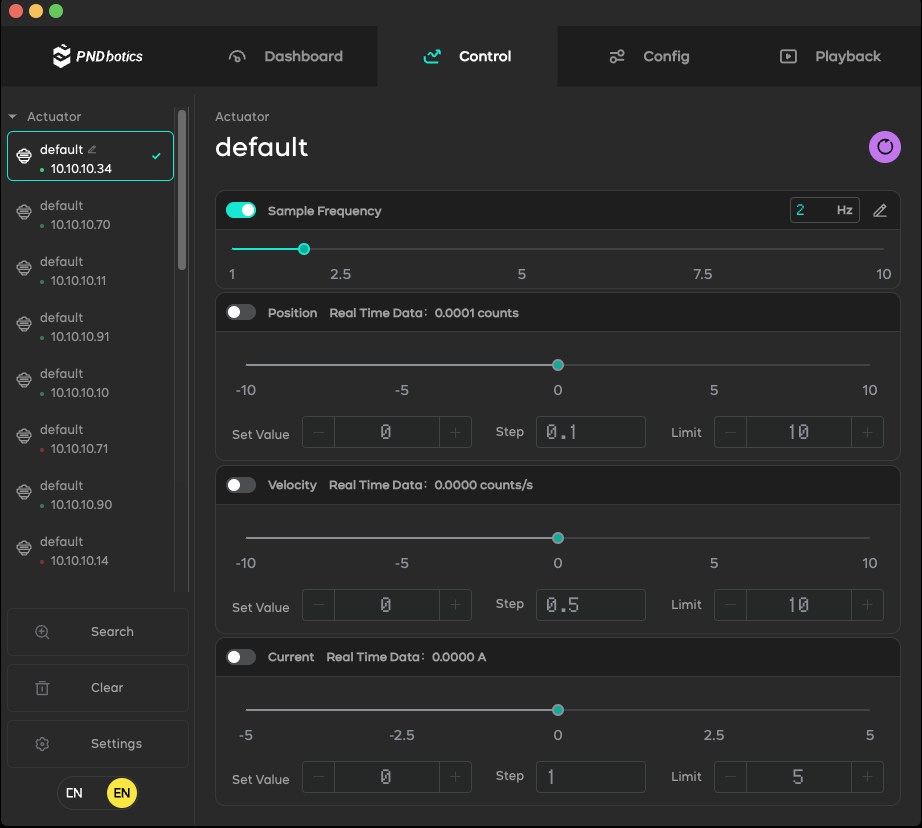
- Sample Frequency:调节Position,Velocity,Current实时数据频率。
- Position:可对当前执行器选择位置模式控制。
- Velocity:可对当前执行器进行速度模式控制。
- Current:可对当前执行器进行电流模式控制。
- 点击右上角Reset按钮:重置参数。
Config配置选项卡
配置选项卡可设置执行器参数。
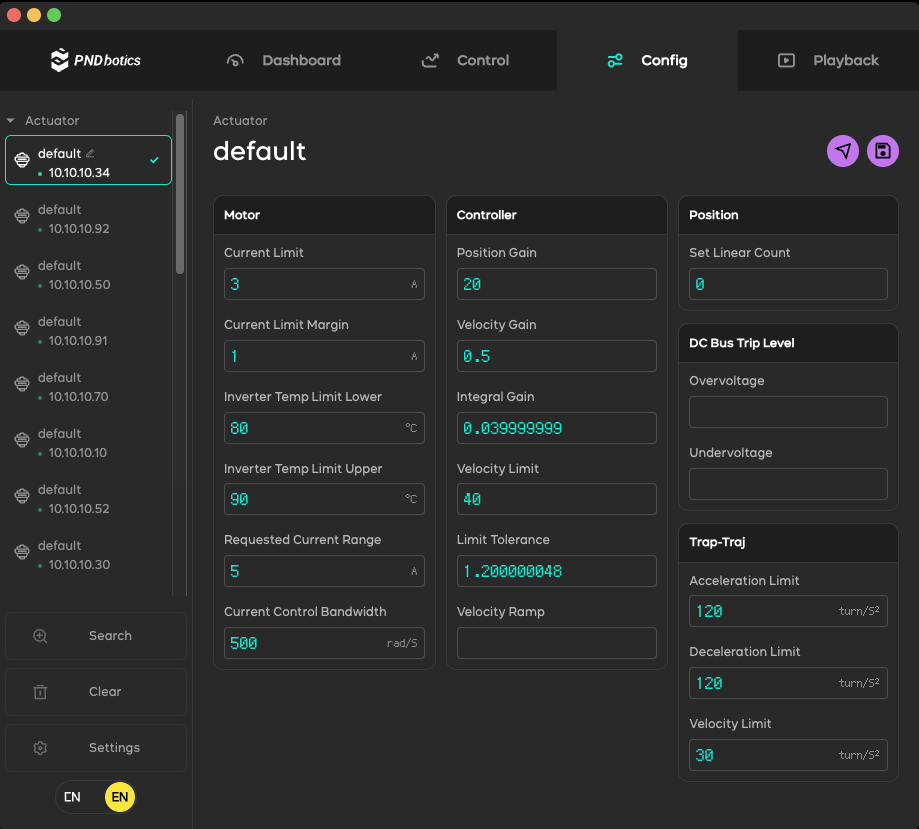
- Motor:电机相关控制参数设置。
- Controller:控制器相关控制参数设置。
- Position:位置相关参数设置。
- DC Bus Trip Level:母线电压保护相关设置。
- Trap-Traj:梯形云顶轨迹相关设置。
Send发送参数设置命令,将修改后的参数发送至执行器(断电重启后执行器中参数将丢失)。
Save保存参数设置命令,将修改后的参数保存至执行器(断电重启后执行器中参数将保持)。