PND-20-14A-S
PND-20-14A-S Series Parameter Introduction
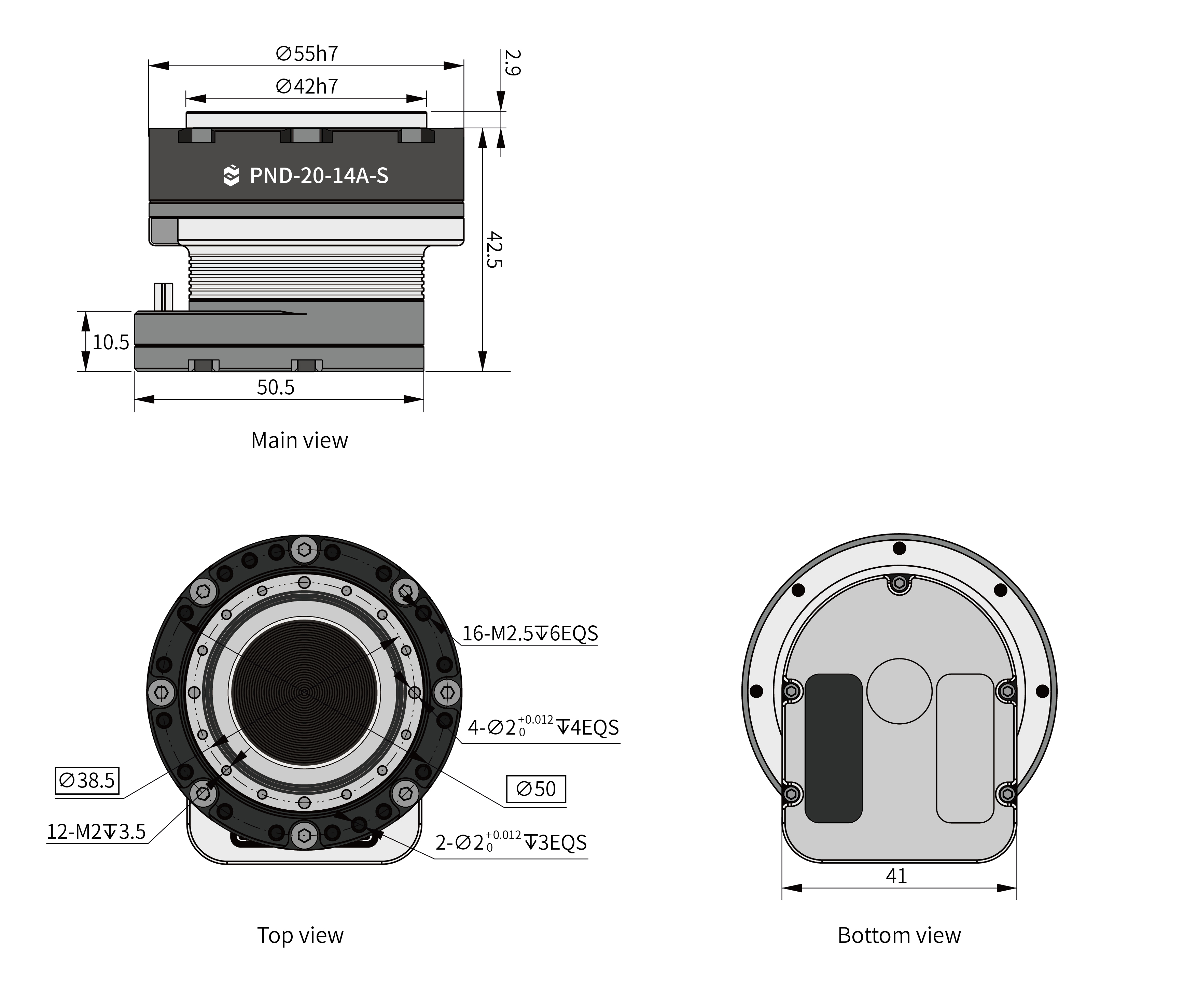
Engineering Drawing
Basic Parameter Table (Motor Output End)
| Motor Parameters | Value | Actuator Parameters | Value |
|---|---|---|---|
| Motor Type | Brushless servo motor | Rated bus voltage | 46.5V DC |
| Rated mechanical output power | 44.3W | Rated phase current | 1.5A |
| Rated speed | 5500rpm | Peak phase current | 4.5A |
| No-load speed | 9000rpm | Motor encoder resolution | 4000 Step/turn |
| Rated torque | 0.077N·m | Communication connector | Type-C |
| Peak torque | 0.231N·m | Power connector | Type-C |
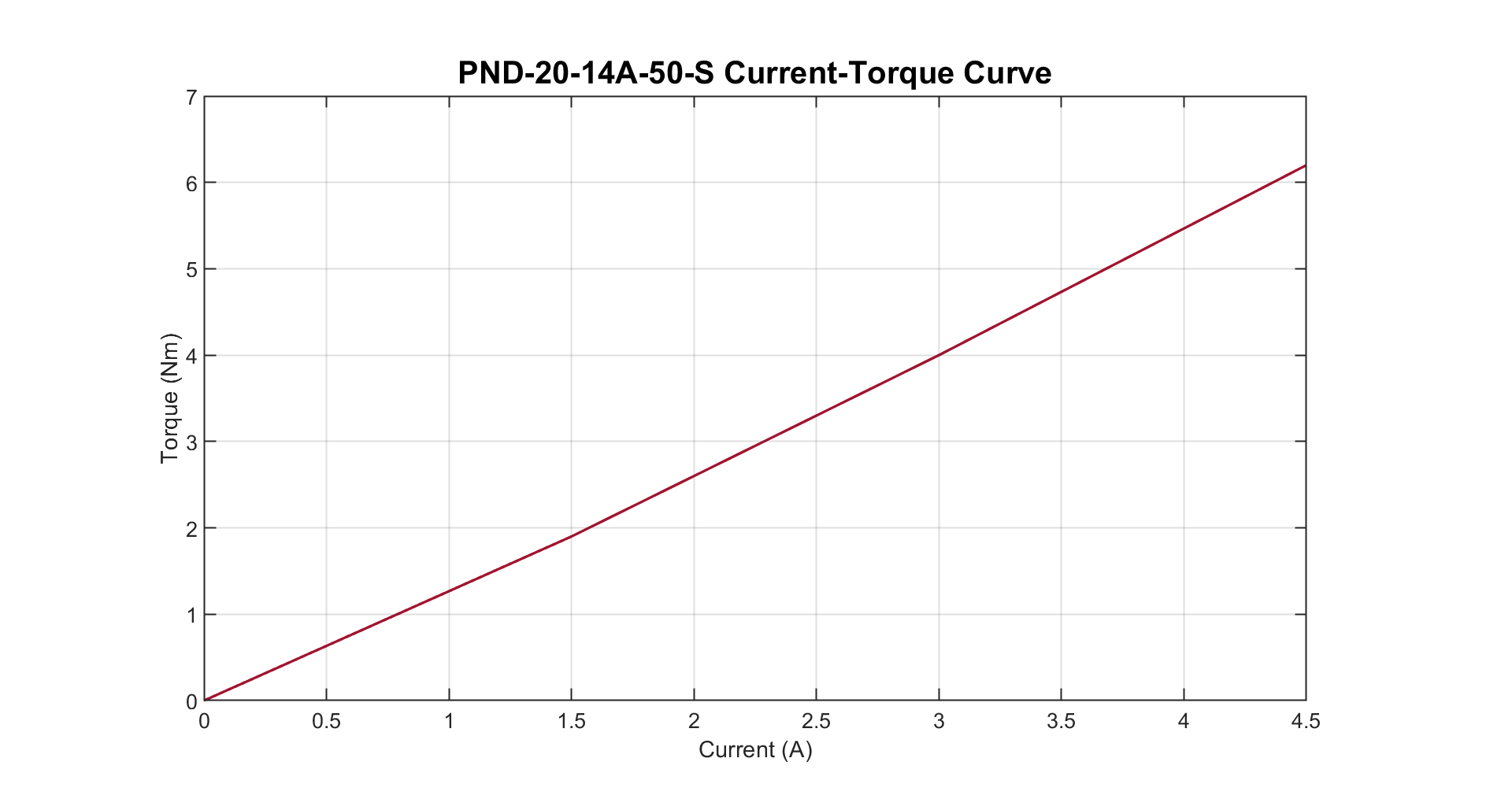
| Torque constant | 0.0513N·m/A | Communication protocol | PND-Network |
| Moment of inertia | \(6.43×10^{-6} kg·m^2\) | Operating voltage range | 12~48V DC |
Note
This data is a theoretical value.
Actuator Parameter Table (Actuator Output End)
| Model | Reduction ratio | Rated torque/N·m | Maximum torque/N·m | Rated speed/RPM | Maximum speed/RPM | Torque constant N·m/A | Weight/kg | Rated output mechanical power/W | Maximum output mechanical power/W |
|---|---|---|---|---|---|---|---|---|---|
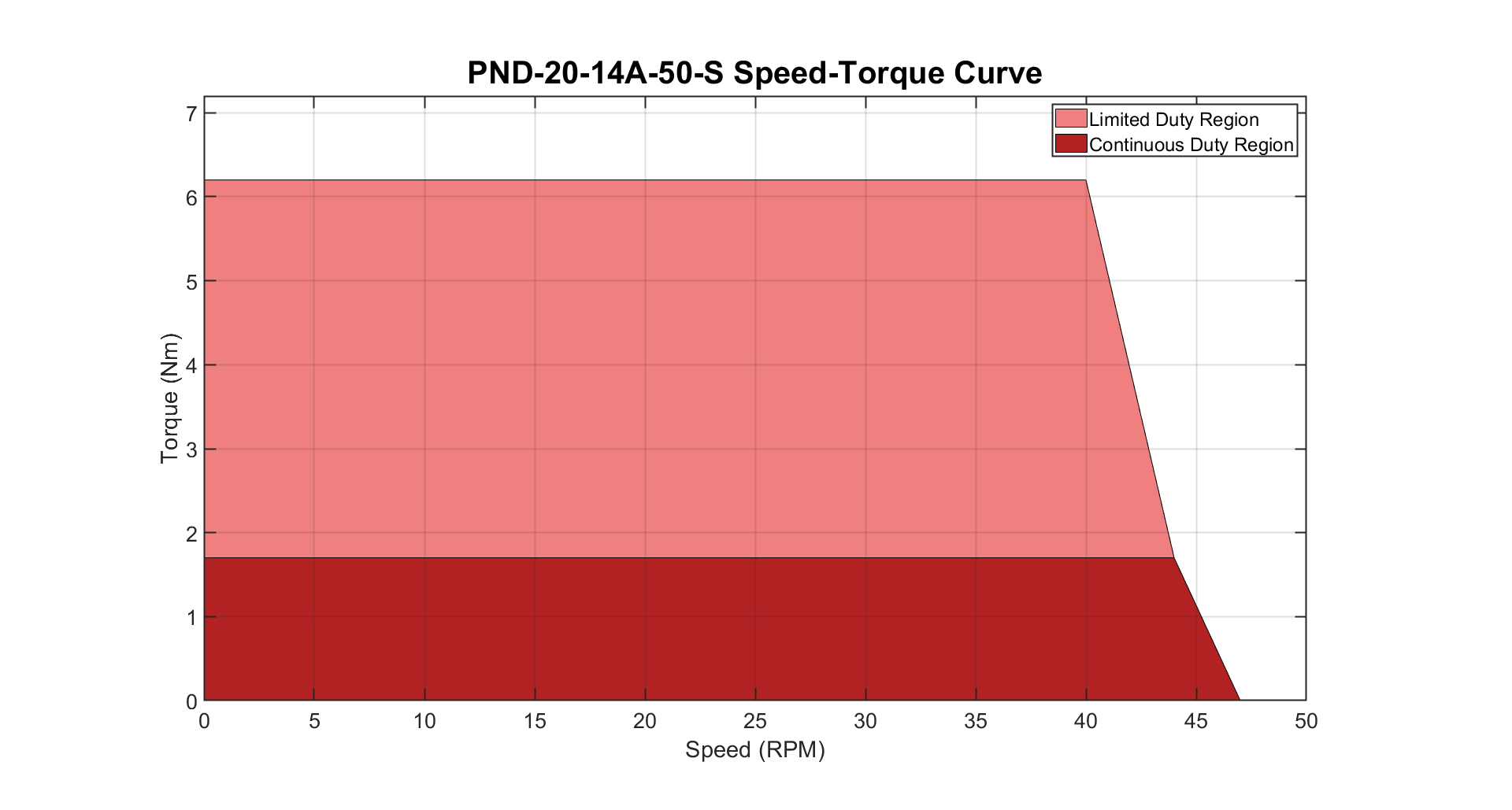
| PND-20-14A-50-S | 51 | 1.7 | 6.2 | 44 | 47 | 1.2 | 0.3 | 8.3 | 26 |
Interface Definition
| Name | Specs |
|---|---|
| Physical layer | 10/100Mbps Ethernet or 2.4GHz Wi-Fi |
| Transport layer protocol | UDP |
| Communication port | (realtime) 2333 |
| Communication port | (service) 2334 |
| IP acquisition method | DHCP/Static IP |
| Application layer protocol | Customized JSON |
The power interface is Type-C
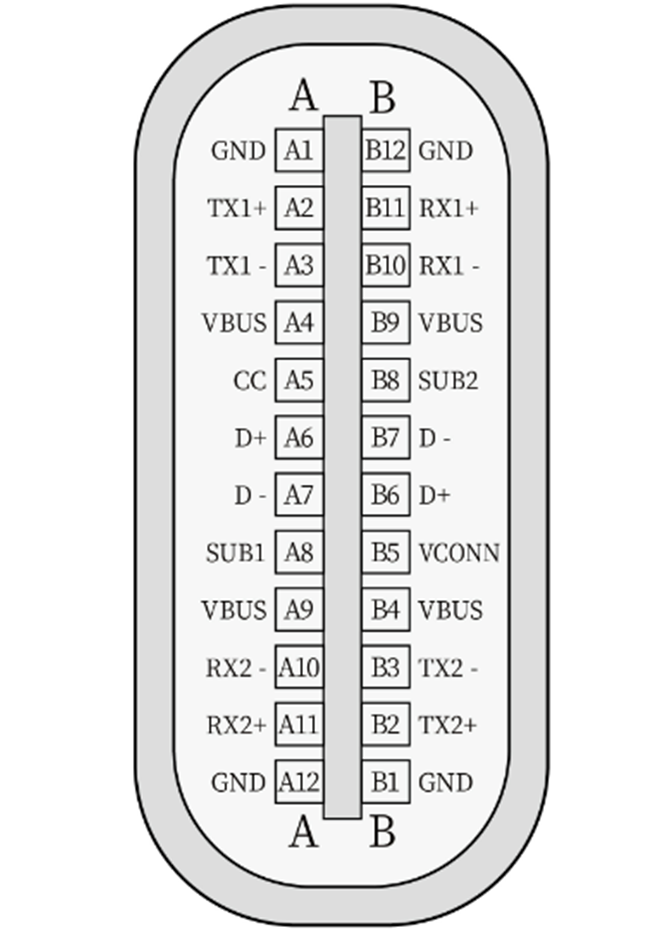
Power/Communication Composite Type - C Pin Definition
| Serial Number | Interface Description |
|---|---|
| A1, A12, B1, B12 | GND |
| A4, A9, B4, B9 | Rated voltage 46.5V |
| B2 | 10/100Mbps Ethernet transmit differential signal TX+ |
| B3 | 10/100Mbps Ethernet transmit differential signal TX- |
| B10 | 10/100Mbps Ethernet receive differential signal RX- |
| B11 | 10/100Mbps Ethernet receive differential signal RX+ |
3D Model
Performance Curve